Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Customer Satisfaction Towards McDonald'sDocument50 pagesCustomer Satisfaction Towards McDonald'sChandan Srivastava100% (2)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- E-Bike Repairer PrateekDocument34 pagesE-Bike Repairer PrateekChandan SrivastavaPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Brand Positioning of Nike in Lucknow CityDocument33 pagesBrand Positioning of Nike in Lucknow CityChandan Srivastava100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Customer Satisfaction Towards Raymonds Fashion WearDocument39 pagesCustomer Satisfaction Towards Raymonds Fashion WearChandan SrivastavaPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Inflation and Its Impact On Indian EconomyDocument75 pagesInflation and Its Impact On Indian EconomyChandan Srivastava100% (1)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Inventory Control HDocument45 pagesInventory Control HChandan SrivastavaPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Marketing Strategies of ToyotaDocument53 pagesMarketing Strategies of ToyotaChandan Srivastava100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Study On Performance Appraisal System at BYJU's in Lucknow CityDocument44 pagesA Study On Performance Appraisal System at BYJU's in Lucknow CityChandan SrivastavaPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- "Convertable Shoes": Mini Project Report IDocument35 pages"Convertable Shoes": Mini Project Report IChandan SrivastavaPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- E Ambulance 1Document45 pagesE Ambulance 1Chandan Srivastava100% (1)
- Environment Friendly Products Made of Bamboo For Daily Household UsageDocument43 pagesEnvironment Friendly Products Made of Bamboo For Daily Household UsageChandan SrivastavaPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Home Made Food Delivery AppDocument43 pagesHome Made Food Delivery AppChandan SrivastavaPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Indoor Garden Lamp With Room FreshenerDocument33 pagesIndoor Garden Lamp With Room FreshenerChandan Srivastava100% (3)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Doorbell Cum Visitor Indicator - Sensing Is Life 1Document35 pagesDoorbell Cum Visitor Indicator - Sensing Is Life 1Chandan Srivastava60% (5)
- PumaDocument20 pagesPumaChandan Srivastava100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- One PlusDocument8 pagesOne PlusChandan SrivastavaPas encore d'évaluation
- History of Nike, Inc.: Brs BeginningsDocument38 pagesHistory of Nike, Inc.: Brs BeginningsChandan SrivastavaPas encore d'évaluation
- "Customised Footwear": Mini Project ReportDocument36 pages"Customised Footwear": Mini Project ReportChandan Srivastava100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Fingerprint Based Atm SystemDocument27 pagesFingerprint Based Atm SystemChandan SrivastavaPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- ReebokDocument12 pagesReebokChandan SrivastavaPas encore d'évaluation
- SamsungDocument23 pagesSamsungChandan SrivastavaPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- XiaomiDocument8 pagesXiaomiChandan SrivastavaPas encore d'évaluation
- HUAWEIDocument13 pagesHUAWEIChandan SrivastavaPas encore d'évaluation
- Versace ShoesDocument4 pagesVersace ShoesChandan SrivastavaPas encore d'évaluation
- Netflix 4Document44 pagesNetflix 4Chandan SrivastavaPas encore d'évaluation
- C. & J. ClarkDocument13 pagesC. & J. ClarkChandan SrivastavaPas encore d'évaluation
- MX Player 3Document2 pagesMX Player 3Chandan SrivastavaPas encore d'évaluation
- SWOT Analysis of Voot 2Document7 pagesSWOT Analysis of Voot 2Chandan SrivastavaPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- JioCinema 5Document2 pagesJioCinema 5Chandan SrivastavaPas encore d'évaluation
- Sun NXT: Available For Android and Ios Devices, Smart Tvs and Other DevicesDocument2 pagesSun NXT: Available For Android and Ios Devices, Smart Tvs and Other DevicesChandan SrivastavaPas encore d'évaluation
- AP Computer Science A: Free-Response QuestionsDocument19 pagesAP Computer Science A: Free-Response QuestionsThatRellPas encore d'évaluation
- MCS Course OutlinesDocument14 pagesMCS Course OutlinesQamar HussainPas encore d'évaluation
- On JavaDocument39 pagesOn JavaSimran jeet KaurPas encore d'évaluation
- Part - 14 LINQ Union MethodDocument11 pagesPart - 14 LINQ Union MethodSathya TechnologyPas encore d'évaluation
- M.Sc. AM C & SDocument46 pagesM.Sc. AM C & SNithya SridharPas encore d'évaluation
- Unit 5Document26 pagesUnit 5Abhinav DakshaPas encore d'évaluation
- Training Report of PythonDocument32 pagesTraining Report of PythonPAWANPREET KAURPas encore d'évaluation
- Static Quiz Solved355Document3 pagesStatic Quiz Solved355Prajwal ChunarkarPas encore d'évaluation
- C++ Overloading (Operator and Function)Document42 pagesC++ Overloading (Operator and Function)Kiptoo NicksonPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- GE8151 - Problem Solving & Python Programming (Ripped From Amazon Kindle Ebooks by Sai Seena)Document232 pagesGE8151 - Problem Solving & Python Programming (Ripped From Amazon Kindle Ebooks by Sai Seena)The QuranPas encore d'évaluation
- Aurei Character Movement ComponentDocument8 pagesAurei Character Movement ComponentMarco ExpósitoPas encore d'évaluation
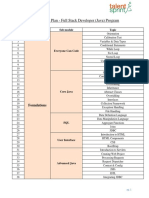
- Delivery Plan - Full Stack Developer (Java) Program: FoundationsDocument4 pagesDelivery Plan - Full Stack Developer (Java) Program: FoundationsAliaPas encore d'évaluation
- Innterview QuestionsDocument19 pagesInnterview QuestionsEmran HossainPas encore d'évaluation
- Session 6 - XPDocument61 pagesSession 6 - XPTạ Tâm Minh0% (1)
- Introduction To Programming With C 3rd Edition Liang Test BankDocument5 pagesIntroduction To Programming With C 3rd Edition Liang Test Banklioneldatfcc12100% (27)
- Oops QuesBankDocument20 pagesOops QuesBanksantoshsugur628Pas encore d'évaluation
- Learning Java An Introduction To Programming With Java The Complete Reference Java Programming For Beginners A Practical... (Neos Thanh) (Z-Library)Document397 pagesLearning Java An Introduction To Programming With Java The Complete Reference Java Programming For Beginners A Practical... (Neos Thanh) (Z-Library)Arai Salim ArtPas encore d'évaluation
- CS212-Object Oriented Programming: Static Variables and MethodsDocument26 pagesCS212-Object Oriented Programming: Static Variables and MethodsAbdul RehmanPas encore d'évaluation
- EnggRoom - Placement - ABB Campus Placement PaperDocument6 pagesEnggRoom - Placement - ABB Campus Placement Papersajeed malagiPas encore d'évaluation
- Constructors AND DestructorsDocument18 pagesConstructors AND DestructorsutkaljyotiPas encore d'évaluation
- JavandroidDocument44 pagesJavandroidengmik2010Pas encore d'évaluation
- Local Objects vs. Distributed Objects: Distributed Object-Based SystemsDocument31 pagesLocal Objects vs. Distributed Objects: Distributed Object-Based SystemsTin Ho QuangPas encore d'évaluation
- Cad Scripting AwkDocument35 pagesCad Scripting AwkPhan Văn TiếnPas encore d'évaluation
- Xaml Cheat SheetDocument4 pagesXaml Cheat SheetDave GuzmanPas encore d'évaluation
- NetFram20 Test Respuestas 1Document5 pagesNetFram20 Test Respuestas 1Alejandro Arzate0% (1)
- Gang of Four Java Design Patterns Gof ExamDocument78 pagesGang of Four Java Design Patterns Gof ExamEr Himanshu VermaPas encore d'évaluation
- CH-7 Concept of Inheritance PDFDocument12 pagesCH-7 Concept of Inheritance PDFJay SandukePas encore d'évaluation
- Object-Oriented Programming: Design Patterns: Ma. Diane S. RiveraDocument30 pagesObject-Oriented Programming: Design Patterns: Ma. Diane S. Riverabreakfree21100% (1)
- Kamal Java Paper6Document11 pagesKamal Java Paper6Kaushik GowdaPas encore d'évaluation
- C++ Lab ManualDocument115 pagesC++ Lab Manuallakshmi.s100% (2)