Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- PFIADocument3 pagesPFIAMbrn AliPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Assignment #03Document2 pagesAssignment #03Mbrn AliPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Advanced Mobile Communication: Assignment No. 02Document4 pagesAdvanced Mobile Communication: Assignment No. 02Mbrn AliPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Advanced Mobile Communication: Assignment No. 02Document4 pagesAdvanced Mobile Communication: Assignment No. 02Mbrn AliPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Home ExperimentsDocument22 pagesHome ExperimentsersingarPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Friends ArepresDocument11 pagesFriends ArepresMbrn AliPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Cecos University College of IT & Emerging Sciences Peshawar CU-520A Lab Exam (B) Time Allowed: 30 Minutes Total Marks: 30 ROLL NUMBERDocument2 pagesCecos University College of IT & Emerging Sciences Peshawar CU-520A Lab Exam (B) Time Allowed: 30 Minutes Total Marks: 30 ROLL NUMBERMbrn AliPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Lab TestDocument3 pagesLab TestMbrn AliPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Photoelectric EffectDocument3 pagesPhotoelectric EffectMbrn AliPas encore d'évaluation
- MirrorsDocument20 pagesMirrorsMbrn AliPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Communication Systems ManualDocument35 pagesCommunication Systems ManualMbrn AliPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Gemoterical Optics - 10 JunDocument21 pagesGemoterical Optics - 10 JunMbrn AliPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- WavesDocument18 pagesWavesMbrn AliPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Physical Optics-Part 1Document33 pagesPhysical Optics-Part 1Mbrn AliPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Scheduling TechniquesDocument13 pagesScheduling Techniqueshatemadl99Pas encore d'évaluation
- How To Deal With RSL IssuesDocument65 pagesHow To Deal With RSL IssuesMbrn Ali100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Communication Systems ManualDocument35 pagesCommunication Systems ManualMbrn AliPas encore d'évaluation
- Voip OverviewDocument12 pagesVoip OverviewMbrn AliPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Project ManagementDocument50 pagesProject ManagementtfbennettPas encore d'évaluation
- Basics of LED (Light Emitting Diode) : SymbolDocument4 pagesBasics of LED (Light Emitting Diode) : SymbolAnandhu c100% (1)
- VCN500 Video Cloud Node BrochureDocument1 pageVCN500 Video Cloud Node BrochureMarcelo GarciaPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- GSM E1 t1 Spec SheetDocument2 pagesGSM E1 t1 Spec Sheetcesar1023Pas encore d'évaluation
- Circuit Transfer Function Mohammad NazriDocument19 pagesCircuit Transfer Function Mohammad Nazrimohammad nazriPas encore d'évaluation
- Impedance Relay Timing Test Report: DobleDocument9 pagesImpedance Relay Timing Test Report: DobleBarry79xPas encore d'évaluation
- Edwards Signaling 852 Data SheetDocument1 pageEdwards Signaling 852 Data SheetJMAC SupplyPas encore d'évaluation
- Measurements and Instrumentation (ELE 3202)Document4 pagesMeasurements and Instrumentation (ELE 3202)JithinPas encore d'évaluation
- AT Command Set (MTK)Document170 pagesAT Command Set (MTK)ivankinoman387650% (2)
- KSR 1010Document3 pagesKSR 1010Ghalielectrosoft GesPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Physics Project WorkDocument15 pagesPhysics Project WorkSidhant KaushikPas encore d'évaluation
- cx5200 enDocument79 pagescx5200 enJosé Francisco MiguelPas encore d'évaluation
- Clarion Ps3021na NB 3022na NBDocument22 pagesClarion Ps3021na NB 3022na NBDiego ToledoPas encore d'évaluation
- Wechip w1 Wireless Fly Air Mouse Rechargeable 2 4ghz Wireless Gyro Sensor Keyboard Remote ControllerDocument2 pagesWechip w1 Wireless Fly Air Mouse Rechargeable 2 4ghz Wireless Gyro Sensor Keyboard Remote ControllerMach MachhiPas encore d'évaluation
- MB SD Connect Compact 4Document18 pagesMB SD Connect Compact 4obdvipPas encore d'évaluation
- Chap3 Ftrans PDFDocument4 pagesChap3 Ftrans PDFRanz KopaczPas encore d'évaluation
- PLC Connection GuideDocument1 467 pagesPLC Connection GuideChhoan Nhun100% (1)
- PSU's Common Syllabus For Electrical Engineering Non-Technical: General StudyDocument2 pagesPSU's Common Syllabus For Electrical Engineering Non-Technical: General StudyJitendra TambePas encore d'évaluation
- Q60S ManualDocument4 pagesQ60S Manualjoaosantos1234Pas encore d'évaluation
- Block Diagram of CRODocument4 pagesBlock Diagram of CROvkry007Pas encore d'évaluation
- 7-439D-6AW-R Campana PDFDocument2 pages7-439D-6AW-R Campana PDFAndres Rodriguez ArevaloPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- 08 Grp11 Hybrid MCP ADocument11 pages08 Grp11 Hybrid MCP Aeurospeed2Pas encore d'évaluation
- RS5583 - IM XPanDG PlusDocument52 pagesRS5583 - IM XPanDG PlusRAYDENTX DIGITAL 3DPas encore d'évaluation
- Multimeter TutorialDocument36 pagesMultimeter Tutoriallam266Pas encore d'évaluation
- Tait Specifications TP8100 USDocument4 pagesTait Specifications TP8100 USepitaPas encore d'évaluation
- Product Classification: Low Pim Termination 100 W Load, Dc-3 GHZDocument3 pagesProduct Classification: Low Pim Termination 100 W Load, Dc-3 GHZZeroPas encore d'évaluation
- Datacom Assighment1 SoluDocument7 pagesDatacom Assighment1 SoluRediet ZemedkunPas encore d'évaluation
- SPTS 2.3 - Performance Specification For Transformers For Connection To The Company System BETTA-11-004 Issue 1Document9 pagesSPTS 2.3 - Performance Specification For Transformers For Connection To The Company System BETTA-11-004 Issue 1sojib0079Pas encore d'évaluation
- Managing Total Solution For Lightning Protection - Petronas Gas Berhad ExperienceDocument28 pagesManaging Total Solution For Lightning Protection - Petronas Gas Berhad ExperiencelugungbujangPas encore d'évaluation
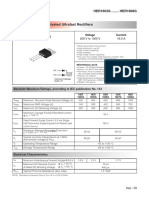
- HER1603G ........ HER1608G: 16.0 Amp. Glass Passivated Ultrafast RectifiersDocument3 pagesHER1603G ........ HER1608G: 16.0 Amp. Glass Passivated Ultrafast RectifiersM SayyafPas encore d'évaluation
- Kaynes Presention - BMDDocument18 pagesKaynes Presention - BMDArvind NangarePas encore d'évaluation
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPND'EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNÉvaluation : 5 sur 5 étoiles5/5 (1)