Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
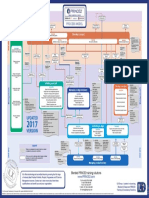
- p2 Process Model 2017Document1 pagep2 Process Model 2017Miguel Fernandes0% (1)
- Introduction To Microsoft OfficeDocument126 pagesIntroduction To Microsoft OfficeLutz F. Krebs100% (8)
- Children Attitude Toward TVC in PakDocument7 pagesChildren Attitude Toward TVC in Pakkashif salmanPas encore d'évaluation
- SunflowerDocument2 pagesSunflowerkashif salmanPas encore d'évaluation
- Imapct of Selected HR Parctices On Percieved Emplyee PerformanceDocument260 pagesImapct of Selected HR Parctices On Percieved Emplyee Performancekashif salmanPas encore d'évaluation
- Leadership Preferences in Japan 2007Document23 pagesLeadership Preferences in Japan 2007kashif salman100% (1)
- Economics of Isl Fin N Securitization - IMF - 07Document37 pagesEconomics of Isl Fin N Securitization - IMF - 07kingjackjiPas encore d'évaluation
- Max PlanckDocument5 pagesMax Planckkashif salmanPas encore d'évaluation
- Challenges and Prospects of HRM Practices in Developing CountriesDocument21 pagesChallenges and Prospects of HRM Practices in Developing Countrieskashif salman0% (1)
- Uk Leadership StyleDocument23 pagesUk Leadership StyleAbid MegedPas encore d'évaluation
- Interpersonal Effect On Performance AppraisalDocument17 pagesInterpersonal Effect On Performance Appraisalkashif salmanPas encore d'évaluation
- Learning in Post-Coma Persons With Profound Multiple Disabilities: Two Case EvaluationsDocument8 pagesLearning in Post-Coma Persons With Profound Multiple Disabilities: Two Case Evaluationskashif salmanPas encore d'évaluation
- Learning by Exploration: Thinking Aloud While Exploring An Information SystemDocument16 pagesLearning by Exploration: Thinking Aloud While Exploring An Information Systemkashif salmanPas encore d'évaluation
- The Effect of Implicit Person Theory On Performance AppraisalsDocument17 pagesThe Effect of Implicit Person Theory On Performance Appraisalskashif salmanPas encore d'évaluation
- Team PerformanceDocument14 pagesTeam Performancekashif salmanPas encore d'évaluation
- 1 Advertising Vs SPDocument26 pages1 Advertising Vs SPSaurabh YadavPas encore d'évaluation
- Advertising PlanningDocument23 pagesAdvertising Planningkashif salman100% (2)
- Effects of Morphine On The Plus-Maze Discriminative Avoidance Task: Role of State-Dependent LearningDocument12 pagesEffects of Morphine On The Plus-Maze Discriminative Avoidance Task: Role of State-Dependent Learningkashif salmanPas encore d'évaluation
- Degree of Handedness A Vects Intermanual Transfer of Skill LearningDocument12 pagesDegree of Handedness A Vects Intermanual Transfer of Skill Learningkashif salmanPas encore d'évaluation
- Good Practice in Lifelong Learning: Richard G. BagnallDocument21 pagesGood Practice in Lifelong Learning: Richard G. Bagnallkashif salmanPas encore d'évaluation
- Systemic Evaluation Methodology: The Emergence of Social Learning From Environmental ICT PrototypesDocument26 pagesSystemic Evaluation Methodology: The Emergence of Social Learning From Environmental ICT Prototypeskashif salmanPas encore d'évaluation
- Reusing Experiences For An Effective Learning in A Web-Based ContextDocument6 pagesReusing Experiences For An Effective Learning in A Web-Based Contextkashif salmanPas encore d'évaluation
- Elitmus PapersDocument21 pagesElitmus Papersanon_879320987Pas encore d'évaluation
- ResumeDocument2 pagesResumeKeannosuke SabusapPas encore d'évaluation
- Chapter 1Document13 pagesChapter 1Jerard AnciroPas encore d'évaluation
- Attitudes and Attitude ChangeDocument19 pagesAttitudes and Attitude Changeprajwal-athrey-3069Pas encore d'évaluation
- Making Effective Pres. Academic Lit I. Weeks 4 5Document27 pagesMaking Effective Pres. Academic Lit I. Weeks 4 5irfanaPas encore d'évaluation
- Adh Dialectical JournalDocument4 pagesAdh Dialectical Journalapi-521174998Pas encore d'évaluation
- Case KohortDocument37 pagesCase KohortNasir AhmadPas encore d'évaluation
- VoorbeeldDocument99 pagesVoorbeeldRobin VosPas encore d'évaluation
- Beed 3a-Group 2 ResearchDocument65 pagesBeed 3a-Group 2 ResearchRose GilaPas encore d'évaluation
- Republic Act No. 1125Document8 pagesRepublic Act No. 1125Jazlynn WongPas encore d'évaluation
- Chairperson 2012 Bar Examinations Committee: Bar Exam Question 2012 Martin S. Villarama, JRDocument73 pagesChairperson 2012 Bar Examinations Committee: Bar Exam Question 2012 Martin S. Villarama, JRsejinma0% (1)
- A Vagabond SongDocument4 pagesA Vagabond SongLiLiana DewiPas encore d'évaluation
- (OCM) Chapter 1 Principles of ManagementDocument23 pages(OCM) Chapter 1 Principles of ManagementMehfooz PathanPas encore d'évaluation
- Sedition ActDocument11 pagesSedition ActYei TengPas encore d'évaluation
- InTech-Project Costs and Risks Estimation Regarding Quality Management System ImplementationDocument28 pagesInTech-Project Costs and Risks Estimation Regarding Quality Management System ImplementationMohamed ArzathPas encore d'évaluation
- Astro ExamDocument7 pagesAstro ExamRitu DuaPas encore d'évaluation
- Research Design1 USED 6Document14 pagesResearch Design1 USED 6Joselle RuizPas encore d'évaluation
- Psychology ProjectDocument7 pagesPsychology Projectsai indiraPas encore d'évaluation
- Section D Textual QuestionsDocument52 pagesSection D Textual Questionsxander ganderPas encore d'évaluation
- 4th Quarter Grade 9 ExamDocument4 pages4th Quarter Grade 9 ExamAnnie Estaris BoloPas encore d'évaluation
- Approaching Checklist Final PDFDocument15 pagesApproaching Checklist Final PDFCohort Partnerships100% (1)
- The Effectiveness of Peppermint Oil (Mentha X Pepipirita) As Mosquito RepellentDocument4 pagesThe Effectiveness of Peppermint Oil (Mentha X Pepipirita) As Mosquito RepellentKester PlaydaPas encore d'évaluation
- Lab Exercise: 8Document5 pagesLab Exercise: 8Test UserPas encore d'évaluation
- Creative LeadershipDocument6 pagesCreative LeadershipRaffy Lacsina BerinaPas encore d'évaluation
- Prof Chase B. Wrenn - The True and The Good - A Strong Virtue Theory of The Value of Truth-Oxford University Press (2024)Document196 pagesProf Chase B. Wrenn - The True and The Good - A Strong Virtue Theory of The Value of Truth-Oxford University Press (2024)Mihaela DodiPas encore d'évaluation
- Heat Transfer OperationsDocument10 pagesHeat Transfer OperationsShafique AhmedPas encore d'évaluation
- CO - Config Sap Top JobsDocument81 pagesCO - Config Sap Top JobsAditya PakalaPas encore d'évaluation
- Early China 2aDocument4 pagesEarly China 2aapi-205540374Pas encore d'évaluation
- STRUCTURAL CONVERSION Examples PDFDocument5 pagesSTRUCTURAL CONVERSION Examples PDFGerard Salmoral ParramonPas encore d'évaluation