Vous aimerez peut-être aussi
- Marriage - Sanjay RathDocument9 pagesMarriage - Sanjay Rathjaynav88% (8)
- Finite Element Analysis: Dr. Latha NagendranDocument91 pagesFinite Element Analysis: Dr. Latha NagendranPopularCollectionClipsPas encore d'évaluation
- Dynamic Behavior of MaterialsDocument1 pageDynamic Behavior of MaterialsnitinPas encore d'évaluation
- Stress Analysis of TEEDocument7 pagesStress Analysis of TEEEPCFirmPas encore d'évaluation
- Spring Mass System ReportDocument10 pagesSpring Mass System ReportTing Kee Chuong100% (1)
- Boehme For Beginners Cynthia BourgeaultDocument7 pagesBoehme For Beginners Cynthia BourgeaultBodibodi100% (2)
- Theory of Elasticity and PlasticityDocument2 pagesTheory of Elasticity and PlasticityNaren GujjarPas encore d'évaluation
- Torsion of A Non-Circular Bar PDFDocument16 pagesTorsion of A Non-Circular Bar PDFPREM KUMARPas encore d'évaluation
- Finite Element Method An Overview PDFDocument8 pagesFinite Element Method An Overview PDFMuller AsmarePas encore d'évaluation
- Post-Processing APDL Models Inside ANSYS® Workbench v15Document26 pagesPost-Processing APDL Models Inside ANSYS® Workbench v15LK AnhDungPas encore d'évaluation
- Ce 5660: Design of Metal Structures Term Project: Design of A Pipe RackDocument10 pagesCe 5660: Design of Metal Structures Term Project: Design of A Pipe RackFayaz HabeebPas encore d'évaluation
- AnsysDocument15 pagesAnsysginupaulPas encore d'évaluation
- Plates & Shells - 11Document14 pagesPlates & Shells - 11RC Dela RocaPas encore d'évaluation
- Navier - Stokes Equation PDFDocument10 pagesNavier - Stokes Equation PDFanagha sreenivasamPas encore d'évaluation
- I.Rajkumar: Introduction To Finite Elements of AnalysisDocument67 pagesI.Rajkumar: Introduction To Finite Elements of AnalysisRaj KumarPas encore d'évaluation
- Finite Element AnalysisDocument7 pagesFinite Element AnalysisTesisTraduccionesRuzelPas encore d'évaluation
- Stress AnalysisDocument8 pagesStress Analysisram vomPas encore d'évaluation
- Leissa - The Free Vibration of Rectangular PlatesDocument37 pagesLeissa - The Free Vibration of Rectangular Platesallentvm100% (1)
- Evaluation of The Non-Linear Fracture Parameters J and C With ANSYSDocument11 pagesEvaluation of The Non-Linear Fracture Parameters J and C With ANSYSPeti KovácsPas encore d'évaluation
- Cantilever Beam TutorialDocument7 pagesCantilever Beam TutorialMohammad Ahmad GharaibehPas encore d'évaluation
- Me2404 Set2Document11 pagesMe2404 Set2என் கருத்துPas encore d'évaluation
- Continuum MechanicsDocument10 pagesContinuum Mechanicschristophe100% (1)
- Thermal Analysis of Pin Fin With Different Shape Forms Using ANSYS PDFDocument8 pagesThermal Analysis of Pin Fin With Different Shape Forms Using ANSYS PDFMuhammad AbbasPas encore d'évaluation
- Transient Thermal Conduction ExampleDocument14 pagesTransient Thermal Conduction ExampleDevendra BangarPas encore d'évaluation
- Fracture Mechanics NotesDocument16 pagesFracture Mechanics NotesHossam M ALrohilyPas encore d'évaluation
- Intro To FemDocument28 pagesIntro To FemcPas encore d'évaluation
- FEA Buckling AnalysisDocument7 pagesFEA Buckling AnalysisRabee Shammas100% (1)
- Blast Event Simulation For A Structure Subjected To A Landmine ExplosionDocument8 pagesBlast Event Simulation For A Structure Subjected To A Landmine ExplosionaishurenjsPas encore d'évaluation
- Fracture Mechanics, Schreus, 2012 PDFDocument162 pagesFracture Mechanics, Schreus, 2012 PDFCarlos HernandezPas encore d'évaluation
- UMAT Theory - Nader Abedrabbo, PH.DDocument2 pagesUMAT Theory - Nader Abedrabbo, PH.DSebastiao SilvaPas encore d'évaluation
- 9/3/17 ME321: Advanced Mechanics of SolidsDocument21 pages9/3/17 ME321: Advanced Mechanics of SolidsBrajesh kumarPas encore d'évaluation
- Practical FEA OverviewDocument37 pagesPractical FEA OverviewPavan Kumar VinjanampatiPas encore d'évaluation
- PB 2 Rayleigh Ritz Method For General Plate Analysis 1993Document6 pagesPB 2 Rayleigh Ritz Method For General Plate Analysis 1993ciscoPas encore d'évaluation
- Finite Element Method Axially Loaded RodsDocument22 pagesFinite Element Method Axially Loaded RodshalimsevimPas encore d'évaluation
- Fea Services - Equipment AnalysisDocument5 pagesFea Services - Equipment AnalysisMiguel A. GarciaPas encore d'évaluation
- Free Vib 1Document20 pagesFree Vib 1Sowjanya KametyPas encore d'évaluation
- New Finite Element Analysis Lec1Document35 pagesNew Finite Element Analysis Lec1BookMaggotPas encore d'évaluation
- Ch6 Thermal Stress Analysis Sp16Document34 pagesCh6 Thermal Stress Analysis Sp16Haidar YafiePas encore d'évaluation
- Fracture Project PresentationDocument16 pagesFracture Project Presentationdhillon_rsdPas encore d'évaluation
- 03 - Hilti Shear Connectors X-HVBDocument8 pages03 - Hilti Shear Connectors X-HVBing urban100% (1)
- Hypermesh TopicsDocument9 pagesHypermesh TopicsARUN PATILPas encore d'évaluation
- FEM Project Report Group13Document16 pagesFEM Project Report Group13nimishk92Pas encore d'évaluation
- 3-d ElasticityDocument40 pages3-d Elasticityp_sahoo8686Pas encore d'évaluation
- Introduction To Finite Element Methods PDFDocument34 pagesIntroduction To Finite Element Methods PDFThirumalaimuthukumaranMohanPas encore d'évaluation
- Chapter 23 - Preparation For CAE InterviewDocument6 pagesChapter 23 - Preparation For CAE InterviewdeepakPas encore d'évaluation
- A Brief Report On Geometrical Modeling and Meshing of Textile Structures in TexGenDocument11 pagesA Brief Report On Geometrical Modeling and Meshing of Textile Structures in TexGenAmir Mosavi33% (3)
- Finite Element Analysis of Sandwich PlatesDocument7 pagesFinite Element Analysis of Sandwich Platesthanhcong313Pas encore d'évaluation
- Introduction To Finite Element Method: Mathematic ModelDocument16 pagesIntroduction To Finite Element Method: Mathematic ModelSanthosh LingappaPas encore d'évaluation
- Nsport Phenomena in Materials Engineering PDF Book - Mediafile Free File SharingDocument3 pagesNsport Phenomena in Materials Engineering PDF Book - Mediafile Free File SharingSanjeev Sahu0% (1)
- Article Review Thermal Buckling Plates ShellsDocument22 pagesArticle Review Thermal Buckling Plates ShellsDinh Cuong TranPas encore d'évaluation
- Using Abaqus To Model Delamination in Fiber-Reinforced Composite MaterialsDocument18 pagesUsing Abaqus To Model Delamination in Fiber-Reinforced Composite MaterialsdashatanliPas encore d'évaluation
- Introduction About Finite Element AnalysisDocument19 pagesIntroduction About Finite Element AnalysisSabareeswaran MurugesanPas encore d'évaluation
- Fracture Mechanics Elastic-Plastic FractureDocument59 pagesFracture Mechanics Elastic-Plastic FractureMansoor AhmadPas encore d'évaluation
- Nonlinear Shell TheoryDocument27 pagesNonlinear Shell TheorychacrdPas encore d'évaluation
- Introduction of FEA (Lecture 1 - 6) - 1Document95 pagesIntroduction of FEA (Lecture 1 - 6) - 1Aliyan TahirPas encore d'évaluation
- Thesis PresentationDocument28 pagesThesis PresentationAfham AhmadPas encore d'évaluation
- Theory of Elasticity and PlasticityDocument12 pagesTheory of Elasticity and PlasticityBharathi RajPas encore d'évaluation
- Solid Element Formulation OverviewDocument36 pagesSolid Element Formulation OverviewasdqwexPas encore d'évaluation
- Viscoplastic Model LS-DynaDocument14 pagesViscoplastic Model LS-DynaJoe SatchPas encore d'évaluation
- Advanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdDocument8 pagesAdvanced Mechanics of Solids by Arthur P Boresi & Schmidth 6 EdChaitanya RamPas encore d'évaluation
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsD'EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorPas encore d'évaluation
- Engineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionD'EverandEngineering Plasticity: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionPas encore d'évaluation
- Discrete Element Method to Model 3D Continuous MaterialsD'EverandDiscrete Element Method to Model 3D Continuous MaterialsPas encore d'évaluation
- Generalized Fierz Identities PDFDocument18 pagesGeneralized Fierz Identities PDFzcapg17Pas encore d'évaluation
- Rainer Maria RilkeDocument2 pagesRainer Maria Rilkezcapg17Pas encore d'évaluation
- Azusa Gando PDFDocument160 pagesAzusa Gando PDFzcapg17Pas encore d'évaluation
- BUSSTEPP Lectures PDFDocument163 pagesBUSSTEPP Lectures PDFzcapg17Pas encore d'évaluation
- Deroeck BUSSTEPP 2016 Part2 v2Document66 pagesDeroeck BUSSTEPP 2016 Part2 v2zcapg17Pas encore d'évaluation
- Problem Sheet 3: Ads-CftDocument3 pagesProblem Sheet 3: Ads-Cftzcapg17Pas encore d'évaluation
- BUSSTEPP 2016 Lecture Notes Exact Wilsonian RenormalizationDocument24 pagesBUSSTEPP 2016 Lecture Notes Exact Wilsonian Renormalizationzcapg17Pas encore d'évaluation
- Staudt, Muto, KlapdorDocument5 pagesStaudt, Muto, Klapdorzcapg17Pas encore d'évaluation
- Double Beta DecayDocument8 pagesDouble Beta Decayzcapg17Pas encore d'évaluation
- BUSSTEPP Problems On Supersymmetry 2: August 2016Document1 pageBUSSTEPP Problems On Supersymmetry 2: August 2016zcapg17Pas encore d'évaluation
- Majorons Without Majorana Masses and Neutrinoless Double Beta DecayDocument14 pagesMajorons Without Majorana Masses and Neutrinoless Double Beta Decayzcapg17Pas encore d'évaluation
- Two-Body Phase SpaceDocument9 pagesTwo-Body Phase Spacezcapg17Pas encore d'évaluation
- (S) Neutrino Properties in R-Parity Violating Supersymmetry: I. CP-conserving PhenomenaDocument28 pages(S) Neutrino Properties in R-Parity Violating Supersymmetry: I. CP-conserving Phenomenazcapg17Pas encore d'évaluation
- The Story of Leslie Peltier's 12-Inch TelescopeDocument10 pagesThe Story of Leslie Peltier's 12-Inch TelescopeKNRCSPas encore d'évaluation
- Flat Earth Koran 02 of 13 - The Flat EarthDocument116 pagesFlat Earth Koran 02 of 13 - The Flat EarthDoctor Jones82% (11)
- A Compendium of Spherical Astronomy, NewcombDocument470 pagesA Compendium of Spherical Astronomy, Newcombandresmejia68100% (1)
- Pioneer 11 EncounterDocument7 pagesPioneer 11 EncounterBob AndrepontPas encore d'évaluation
- Stellarium User Guide 0.16.0 1Document322 pagesStellarium User Guide 0.16.0 13dycsaPas encore d'évaluation
- Kant AssignmentDocument2 pagesKant AssignmentSultan çaçaPas encore d'évaluation
- Essay 2 - Neoplatonism & The Problem of EvilDocument8 pagesEssay 2 - Neoplatonism & The Problem of Evilanti-climacusPas encore d'évaluation
- Method of Wear GemDocument24 pagesMethod of Wear GemGorav BhallaPas encore d'évaluation
- Jupiter TransitsDocument227 pagesJupiter Transitsvinaykansal1100% (1)
- Group 8: Morado, Jhayd Elegarle, Ashleigh Vhone Conception, Gabriela Caarbajosa, John LloydDocument31 pagesGroup 8: Morado, Jhayd Elegarle, Ashleigh Vhone Conception, Gabriela Caarbajosa, John LloydLeigh AshleighPas encore d'évaluation
- Nadi AmshaDocument6 pagesNadi Amshavksk1951100% (1)
- Newtonian CosmologyDocument8 pagesNewtonian CosmologyFrancisco Fabián ArellanoPas encore d'évaluation
- Poornachandra HoroscopeDocument7 pagesPoornachandra HoroscopeindramuniPas encore d'évaluation
- HKPhO 01vbnvbnvbnvbnvbnvbnDocument20 pagesHKPhO 01vbnvbnvbnvbnvbnvbnSumihar SimangunsongPas encore d'évaluation
- Intermediate Fluid Mechanics Lecture NotesDocument292 pagesIntermediate Fluid Mechanics Lecture NotesAabhas SrivastavaPas encore d'évaluation
- Scientific RevolutionDocument14 pagesScientific Revolutiontechzones100% (2)
- Physical Quantities and UnitsDocument41 pagesPhysical Quantities and UnitsRanjith RajPas encore d'évaluation
- Reader Response TheoryDocument3 pagesReader Response TheoryYuva Bharathi KPas encore d'évaluation
- Balfour Stewart - The Conservation of Energy (1873)Document183 pagesBalfour Stewart - The Conservation of Energy (1873)momir6856Pas encore d'évaluation
- Manual OccultismDocument390 pagesManual OccultismJikker Gigi Phatbeatzz Barrow100% (11)
- Spisak KnjigaDocument2 pagesSpisak KnjigaMiloradPas encore d'évaluation
- 1945 Hall Astrology and ReincarnationDocument51 pages1945 Hall Astrology and ReincarnationCatalina Georgiana Moraru100% (6)
- Keplers LawDocument2 pagesKeplers LawDaniela EdilloPas encore d'évaluation
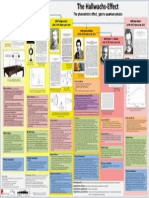
- Hallwachs - Poster-A4-EnDocument1 pageHallwachs - Poster-A4-Enapi-281473337Pas encore d'évaluation
- Light ManipulationDocument3 pagesLight ManipulationSunčica NisamPas encore d'évaluation
- Know Your 1st House - Upcoming BookDocument4 pagesKnow Your 1st House - Upcoming BookvishalPas encore d'évaluation