Vous aimerez peut-être aussi
- Illinois Exam2 Practice Solfa08Document4 pagesIllinois Exam2 Practice Solfa08bittronicPas encore d'évaluation
- Compilation 1,2,3Document7 pagesCompilation 1,2,3Kharolina BautistaPas encore d'évaluation
- Experiment 5Document11 pagesExperiment 5Malathe SalahPas encore d'évaluation
- RAML in Action - Relational Algebra and SQL Examples PDFDocument31 pagesRAML in Action - Relational Algebra and SQL Examples PDFGautam SinghPas encore d'évaluation
- Chapter 2 Processor ManagementDocument46 pagesChapter 2 Processor ManagementAhmad AzabatPas encore d'évaluation
- 05 Vaishnavi Bhosale B1Document68 pages05 Vaishnavi Bhosale B1Raj KheratkarPas encore d'évaluation
- MCS-021 Data and File StructuresDocument8 pagesMCS-021 Data and File Structureskktamang09Pas encore d'évaluation
- Lab 2 No AnswersDocument2 pagesLab 2 No Answersnemanja0% (1)
- CT3 PDFDocument154 pagesCT3 PDFMr. RAVI KUMAR IPas encore d'évaluation
- 4 Spreadsheet Simulation BasicsDocument11 pages4 Spreadsheet Simulation BasicsAbdu AbdoulayePas encore d'évaluation
- Ece 565 HW 2 PDFDocument7 pagesEce 565 HW 2 PDFQuỳnh NgaPas encore d'évaluation
- csd8 Summer07solnsDocument18 pagescsd8 Summer07solnsEric GithuaPas encore d'évaluation
- Lecture 9 - Database Normalization PDFDocument52 pagesLecture 9 - Database Normalization PDFChia Wei HanPas encore d'évaluation
- LEC/BJT DC Analysis Examples SolDocument5 pagesLEC/BJT DC Analysis Examples SolFilipe da SilveiraPas encore d'évaluation
- ADocument2 pagesAMa JunPas encore d'évaluation
- Ai List of Proposed ExercisesDocument4 pagesAi List of Proposed ExercisesArwa AbdulPas encore d'évaluation
- Tutorial 5-7Document19 pagesTutorial 5-7lucyPas encore d'évaluation
- Unit - IvDocument48 pagesUnit - IvJit AggPas encore d'évaluation
- Quiz For Chapter 3 With Solutions PDFDocument8 pagesQuiz For Chapter 3 With Solutions PDFSiddharth SinghPas encore d'évaluation
- History of Telecom & ElectronicsDocument90 pagesHistory of Telecom & ElectronicsRajuraji100% (1)
- Core Java (35) - 08081620CJ040618 (AutoRecovered)Document63 pagesCore Java (35) - 08081620CJ040618 (AutoRecovered)Anand KumarPas encore d'évaluation
- Alanis Parks Department: Analyze and Chart Financial DataDocument7 pagesAlanis Parks Department: Analyze and Chart Financial DataJacob SheridanPas encore d'évaluation
- موسوعة امثلة C++ المحلولةDocument34 pagesموسوعة امثلة C++ المحلولةRay AlPas encore d'évaluation
- Name: Abhishek Kumar REG - NO:18BIT0161 Q1) Write An ALP For Adding Two 8 Bit Numbers 02H, 07H Stored in Registers B and C RespectivelyDocument13 pagesName: Abhishek Kumar REG - NO:18BIT0161 Q1) Write An ALP For Adding Two 8 Bit Numbers 02H, 07H Stored in Registers B and C RespectivelyAbhishekPas encore d'évaluation
- Solution To TestDocument6 pagesSolution To Testkitana_sectPas encore d'évaluation
- Tutorial 11 SolutionsDocument7 pagesTutorial 11 SolutionsDA Wei SunPas encore d'évaluation
- CHP 5 Pic Micro Controller Instruction SetDocument75 pagesCHP 5 Pic Micro Controller Instruction Setsetup.143Pas encore d'évaluation
- Lecture Programming MicrocontrollerDocument69 pagesLecture Programming MicrocontrollerAnadiKashyapPas encore d'évaluation
- En Subject sh00Document15 pagesEn Subject sh00jmolfigueiraPas encore d'évaluation
- Digital SheetDocument20 pagesDigital SheetTAY CHUI SHENG100% (1)
- Chapter 4 - Recursion TreeDocument14 pagesChapter 4 - Recursion TreeGaurav AgrawalPas encore d'évaluation
- Dr. Verghese Kurien An EssayDocument2 pagesDr. Verghese Kurien An Essayadolf92Pas encore d'évaluation
- ITSU 1001 Introduction To Computer Systems and Networking: Tutorial 5 For Lesson 5Document5 pagesITSU 1001 Introduction To Computer Systems and Networking: Tutorial 5 For Lesson 5Rakesh ydavPas encore d'évaluation
- Assignment 2Document4 pagesAssignment 2DharneeshkarDandyPas encore d'évaluation
- Aim - Write A Program To Simulate Pure-Pursuit Problem of Continuous System Simulation. CodeDocument18 pagesAim - Write A Program To Simulate Pure-Pursuit Problem of Continuous System Simulation. CodeSK KashyapPas encore d'évaluation
- Query Optimization: Practice ExercisesDocument4 pagesQuery Optimization: Practice ExercisesDivyanshu BosePas encore d'évaluation
- Win DNS DHCPDocument9 pagesWin DNS DHCPvishwahPas encore d'évaluation
- HW 3Document3 pagesHW 3ArslanPas encore d'évaluation
- Lab1 - Vlsi EceDocument19 pagesLab1 - Vlsi EceMichelleCYLPas encore d'évaluation
- 17-CAT-II Key G2 Slot-26-Aug-2019Material - I - 26-Aug-2019 - CAT2-G2 - AK - 2019 - LIJDocument4 pages17-CAT-II Key G2 Slot-26-Aug-2019Material - I - 26-Aug-2019 - CAT2-G2 - AK - 2019 - LIJAhmed Shmels MuhePas encore d'évaluation
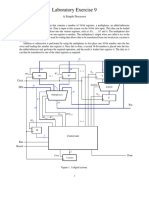
- Lab9 VHDLDocument8 pagesLab9 VHDLFasli CoolPas encore d'évaluation
- ApplicationsDocument44 pagesApplicationsmerinjose123100% (1)
- Laboratory Experiment For Digital ElectronicsDocument1 pageLaboratory Experiment For Digital ElectronicsPiyush RajPas encore d'évaluation
- OS Lab ManualDocument71 pagesOS Lab ManualveditttttaPas encore d'évaluation
- NMS-Bank From DR - IyadDocument60 pagesNMS-Bank From DR - IyadRamy MattaPas encore d'évaluation
- Solutions To Set 7Document20 pagesSolutions To Set 7kitana_sect100% (1)
- MCS 012Document4 pagesMCS 012S.M. FarhanPas encore d'évaluation
- Extra ProblemsDocument41 pagesExtra ProblemsPragati Chimangala100% (3)
- Fork System CallDocument3 pagesFork System Callrose marine100% (1)
- VL2018191004391 Ast03 PDFDocument7 pagesVL2018191004391 Ast03 PDFPARTH BADKUL 19BCI0186Pas encore d'évaluation
- Caal Lab ManualDocument63 pagesCaal Lab ManualFarrukh Abbasi100% (1)
- Unit - 2 Central Processing Unit TOPIC 1: General Register OrganizationDocument13 pagesUnit - 2 Central Processing Unit TOPIC 1: General Register OrganizationRam Prasad GudiwadaPas encore d'évaluation
- DBMS RecordDocument76 pagesDBMS RecordPranava PranuPas encore d'évaluation
- The Acorn RISC Machine (ARM)Document12 pagesThe Acorn RISC Machine (ARM)Vikas SinghPas encore d'évaluation
- Report On 4x1 MultiplexerDocument17 pagesReport On 4x1 MultiplexerPRAVEEN KUMAWATPas encore d'évaluation
- Cs2252 - MPMC 16 M With Answers Upto 2Document40 pagesCs2252 - MPMC 16 M With Answers Upto 2archumeenabaluPas encore d'évaluation
- Microprocessor and InterfacingDocument25 pagesMicroprocessor and InterfacingEr Bhavik PatelPas encore d'évaluation
- Computer Science Textbook Solutions - 31Document30 pagesComputer Science Textbook Solutions - 31acc-expertPas encore d'évaluation
- Module-3 ARMProgram Notes.-16857877494142 PDFDocument5 pagesModule-3 ARMProgram Notes.-16857877494142 PDFrockyv9964Pas encore d'évaluation
- An Example Hardwired CPUDocument29 pagesAn Example Hardwired CPUMauro Ferreira De LimaPas encore d'évaluation
- Q. P. Code: 08235Document8 pagesQ. P. Code: 08235Mr AnonymousPas encore d'évaluation
- Compiling QT and Tslib For Mini2440 and Run A DemoDocument4 pagesCompiling QT and Tslib For Mini2440 and Run A DemoCông TríPas encore d'évaluation
- Head Office IP AddressDocument6 pagesHead Office IP AddressSafayet chowdhuryPas encore d'évaluation
- Electronics Lab ManualDocument43 pagesElectronics Lab ManualVijay Kr.100% (2)
- Envy X360Document79 pagesEnvy X360Johann QuintanarPas encore d'évaluation
- Dell UPS - Cheat Sheet Ups - r2Document3 pagesDell UPS - Cheat Sheet Ups - r2Daniel SherwoodPas encore d'évaluation
- OSY Microproject GroupDocument37 pagesOSY Microproject GroupKunal MhatrePas encore d'évaluation
- Presentation - 02 Reliability in Computer SystemsDocument24 pagesPresentation - 02 Reliability in Computer Systemsvictorwu.ukPas encore d'évaluation
- Multicore Processors and Systems PDFDocument310 pagesMulticore Processors and Systems PDFwkfzar100% (1)
- 24AA128/24LC128/24FC128: 128K I C Cmos Serial EepromDocument26 pages24AA128/24LC128/24FC128: 128K I C Cmos Serial EepromcraponzelPas encore d'évaluation
- InternalArchitecture 8086 - PPTDocument21 pagesInternalArchitecture 8086 - PPTGayatri JethaniPas encore d'évaluation
- Cse L-3, T-1 (2015-2016)Document23 pagesCse L-3, T-1 (2015-2016)Faraaz AhmedPas encore d'évaluation
- TN 100 USB VID-PID Guidelines PDFDocument12 pagesTN 100 USB VID-PID Guidelines PDFMastaj KrzysztofPas encore d'évaluation
- VNX5300 Hardware Information GuideDocument92 pagesVNX5300 Hardware Information Guidesandeepsohi88Pas encore d'évaluation
- Umec t.msd309-b63b Main Chassis SchemaDocument10 pagesUmec t.msd309-b63b Main Chassis Schemachip vasyPas encore d'évaluation
- HC2021.C1.4 Intel ArijitDocument22 pagesHC2021.C1.4 Intel ArijitddscribePas encore d'évaluation
- Series 90 PLC Serial Communications User's Manual, GFK-0582Dgfk0582d PDFDocument381 pagesSeries 90 PLC Serial Communications User's Manual, GFK-0582Dgfk0582d PDFARTURO TZITZIHUA HERNANDEZPas encore d'évaluation
- SHR-2160/2162/2080/2082 User's ManualDocument184 pagesSHR-2160/2162/2080/2082 User's ManualAnonymous dfJF0NBAMFPas encore d'évaluation
- S80-Rfid enDocument2 pagesS80-Rfid enRichard Garcia ZaratePas encore d'évaluation
- PM5 CSAFECommunicationDefinitionDocument161 pagesPM5 CSAFECommunicationDefinitionkrsydgmturdshsocpkPas encore d'évaluation
- Modbus - Master (Communicate Using SIPLUS I O or TheDocument21 pagesModbus - Master (Communicate Using SIPLUS I O or TheDil NawazPas encore d'évaluation
- How RAM WorksDocument9 pagesHow RAM WorksPablo Miguel FelsteadPas encore d'évaluation
- Adafruit Feather M0 Adalogger PinoutDocument1 pageAdafruit Feather M0 Adalogger PinoutBarasPas encore d'évaluation
- MC9S08DZ32Document396 pagesMC9S08DZ32bandusPas encore d'évaluation
- USB Type-C R2.2 ECN - Fix TBT3 Discovery and Entry Flow For Gen4 or Better Passive CablesDocument4 pagesUSB Type-C R2.2 ECN - Fix TBT3 Discovery and Entry Flow For Gen4 or Better Passive CablesimtangyuweiPas encore d'évaluation
- 1958210865-37360 - GW4 ReDocument52 pages1958210865-37360 - GW4 Reene_platiniPas encore d'évaluation
- DMT48270C043 03WDocument3 pagesDMT48270C043 03WMatheus AugustoPas encore d'évaluation
- Allen Bradley Micrologix 1500Document3 pagesAllen Bradley Micrologix 1500oscar.hidalgoPas encore d'évaluation
- Flash Disk RepairDocument2 pagesFlash Disk RepairFerara PutriPas encore d'évaluation
- Manual de Instruções ION ALESIS DM6 (12 Páginas) 2Document1 pageManual de Instruções ION ALESIS DM6 (12 Páginas) 2julio FernandesPas encore d'évaluation