Vous aimerez peut-être aussi
- Matriz de Cortocircuito en El Periodo SubtransienteDocument7 pagesMatriz de Cortocircuito en El Periodo SubtransienteWarner Rodriguez DuranPas encore d'évaluation
- Metodología de La Ejecución de La ObraDocument1 pageMetodología de La Ejecución de La ObraWarner Rodriguez DuranPas encore d'évaluation
- Mapas ConceptualesDocument12 pagesMapas ConceptualesWarner Rodriguez DuranPas encore d'évaluation
- Monografia Byron Aparato RepoductorDocument61 pagesMonografia Byron Aparato RepoductorWarner Rodriguez DuranPas encore d'évaluation
- Proyecto Sistema de Potencia IIDocument34 pagesProyecto Sistema de Potencia IIWarner Rodriguez DuranPas encore d'évaluation
- Como Esta Formado Un Sistema ContableDocument2 pagesComo Esta Formado Un Sistema ContableWarner Rodriguez DuranPas encore d'évaluation
- Planificacion Curricular AnualDocument4 pagesPlanificacion Curricular AnualWarner Rodriguez DuranPas encore d'évaluation
- Plan de Clase 7mo AñoDocument523 pagesPlan de Clase 7mo AñoWarner Rodriguez Duran77% (13)
- Diferencias Entre Liderazgo y GestionDocument2 pagesDiferencias Entre Liderazgo y GestionezarauzPas encore d'évaluation
- Presentacion Six DGDocument41 pagesPresentacion Six DGArnold medina sanchezPas encore d'évaluation
- Inecuaciones de Primer y Segundo GradoDocument12 pagesInecuaciones de Primer y Segundo GradoArturo RamosPas encore d'évaluation
- Células Humanas Viejas Rejuvenecidas en Un Descubrimiento Revolucionario Sobre El EnvejecimientoDocument27 pagesCélulas Humanas Viejas Rejuvenecidas en Un Descubrimiento Revolucionario Sobre El EnvejecimientoJean Romero YampulPas encore d'évaluation
- Unidad 2. Estrategias LogisticasDocument49 pagesUnidad 2. Estrategias LogisticasEdgar Garay0% (1)
- Investigacion Que Es La Cavitacion y Cuales Son Las Variables A Considerar para Seleccionar Una Bomba CentrifugaDocument10 pagesInvestigacion Que Es La Cavitacion y Cuales Son Las Variables A Considerar para Seleccionar Una Bomba CentrifugaChristian DanielPas encore d'évaluation
- T LBC 140280Document105 pagesT LBC 140280SergioArmandoGtzOrantesPas encore d'évaluation
- Comercializadora Gical S.A. de C.V. - GG - 91Document1 pageComercializadora Gical S.A. de C.V. - GG - 91Emmanuel MartinezPas encore d'évaluation
- Evaluacion Funciones ExcelDocument3 pagesEvaluacion Funciones ExcelgilberPas encore d'évaluation
- Sistema de DesignaciónDocument6 pagesSistema de Designaciónyeraldo zegarra solorzanoPas encore d'évaluation
- Empujes 181026042004Document25 pagesEmpujes 181026042004Antony Joel Santos VivancoPas encore d'évaluation
- Presentación-Diseño de EncofradosDocument40 pagesPresentación-Diseño de EncofradosYenner Gamarra AsencioPas encore d'évaluation
- Teoria Del Final en La Partida de Ajedrez - Ganzo (1957) PDFDocument94 pagesTeoria Del Final en La Partida de Ajedrez - Ganzo (1957) PDFanfichoelosPas encore d'évaluation
- Caracteristicas Constructivas de Los Captaciones Desde EmbalseDocument10 pagesCaracteristicas Constructivas de Los Captaciones Desde Embalseanon_674787436Pas encore d'évaluation
- Lab. Qaii Practica 3 Det. Bi en Fármaco Por ComplejometríaDocument2 pagesLab. Qaii Practica 3 Det. Bi en Fármaco Por ComplejometríaToramaru Utsunomiya50% (2)
- Business Model Canvas (Pagina Arriendo Canchas)Document1 pageBusiness Model Canvas (Pagina Arriendo Canchas)Ignacio SalasPas encore d'évaluation
- HLM - ASM - Diri - Sem 02Document2 pagesHLM - ASM - Diri - Sem 02Carlos Martín Medina TáberPas encore d'évaluation
- Fundamentos de La Administracion CientificaDocument5 pagesFundamentos de La Administracion CientificaRenato MamPas encore d'évaluation
- Osteología Del CráneoDocument89 pagesOsteología Del CráneoJuan Daniel Flggr RamirezPas encore d'évaluation
- Informe Diagnostico (Parque San Cristobal) PDFDocument10 pagesInforme Diagnostico (Parque San Cristobal) PDFArnold VillarPas encore d'évaluation
- 6.-Unidad Ii Tema 3 Metodos de Levantamientos Con Transito y LongimetroDocument9 pages6.-Unidad Ii Tema 3 Metodos de Levantamientos Con Transito y LongimetronaborPas encore d'évaluation
- Los RelacionantesDocument7 pagesLos RelacionanteselmariadavalosmunarrPas encore d'évaluation
- Grupo F - Guia de Practica I Unidad - Tecnología Farmacéutica IiDocument41 pagesGrupo F - Guia de Practica I Unidad - Tecnología Farmacéutica IiCristhian aaron Gutierrez RomanPas encore d'évaluation
- Manual Minesight2Document10 pagesManual Minesight2asPas encore d'évaluation
- Taller de Casuistica N°2 BienesDocument2 pagesTaller de Casuistica N°2 BienesFabian Mora100% (2)
- Información General AmtDocument4 pagesInformación General AmtPABLO GRANJAPas encore d'évaluation
- CURSO DE RECREADOR INFANTIL UltimoDocument34 pagesCURSO DE RECREADOR INFANTIL UltimoAna Karina Brito DuquePas encore d'évaluation
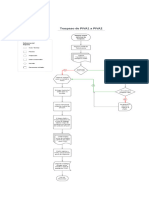
- Procesos de Envios de PIVA1 A PIVA2Document1 pageProcesos de Envios de PIVA1 A PIVA2casa.maravillas273Pas encore d'évaluation
- Teorema de BayesDocument5 pagesTeorema de BayesRicardo SuarezPas encore d'évaluation
- TESIS ALE Y EMI 2 CompletaDocument27 pagesTESIS ALE Y EMI 2 CompletaalejandroPas encore d'évaluation