Vous aimerez peut-être aussi
- Boiler Safety & Relief ValvesDocument3 pagesBoiler Safety & Relief ValvesEmad A.AhmadPas encore d'évaluation
- Lathe Machine OperationDocument68 pagesLathe Machine OperationKarthick N100% (8)
- Fundamentals - ValvesDocument52 pagesFundamentals - Valvesapi-3808778100% (2)
- Ventil Valve Academy 2013Document6 pagesVentil Valve Academy 2013gmg210981Pas encore d'évaluation
- Tema & Asme Section Viii Div1 Section UhxDocument20 pagesTema & Asme Section Viii Div1 Section UhxEmad A.Ahmad100% (1)
- Cold Cracking in WeldingDocument1 pageCold Cracking in WeldingEmad A.Ahmad50% (2)
- Testandrepairpressuresafetyvalves - FlattenedDocument3 pagesTestandrepairpressuresafetyvalves - FlattenedEmad A.AhmadPas encore d'évaluation
- AppSphereweldingk PDFDocument2 pagesAppSphereweldingk PDFEmad A.AhmadPas encore d'évaluation
- Hardnes TestDocument25 pagesHardnes TestSagun AlmarioPas encore d'évaluation
- Isolation Valves - Linear MovementDocument9 pagesIsolation Valves - Linear MovementEmad A.AhmadPas encore d'évaluation
- Metal Sleeves Vs Composites Wrapping in Piping RepairDocument7 pagesMetal Sleeves Vs Composites Wrapping in Piping RepairEmad A.Ahmad100% (1)
- Gas Tungsten Arc WeldingDocument13 pagesGas Tungsten Arc WeldingEmad A.AhmadPas encore d'évaluation
- Isolation Valves - Linear MovementDocument9 pagesIsolation Valves - Linear MovementEmad A.AhmadPas encore d'évaluation
- Arc Welding and Magnetic Blow EWF Doc 41 PDFDocument1 pageArc Welding and Magnetic Blow EWF Doc 41 PDFEmad A.AhmadPas encore d'évaluation
- Work Clothing CodeDocument3 pagesWork Clothing CodeEmad A.AhmadPas encore d'évaluation
- Metallography of Welds - ASM International PDFDocument5 pagesMetallography of Welds - ASM International PDFJoseph Alexander BorgPas encore d'évaluation
- Welding PreheatDocument2 pagesWelding PreheatsjmudaPas encore d'évaluation
- 78 Lamellar TearingDocument1 page78 Lamellar Tearingrathish14uPas encore d'évaluation
- Arc Welding - Basic Steps ReadingDocument12 pagesArc Welding - Basic Steps Readingaddayesudas100% (1)
- Fatigue Life Prediction of Cruciform Joints Falling at The Weld Toe WJ - 1992 - 08 - s269 PDFDocument8 pagesFatigue Life Prediction of Cruciform Joints Falling at The Weld Toe WJ - 1992 - 08 - s269 PDFEmad A.AhmadPas encore d'évaluation
- Hardnes TestDocument25 pagesHardnes TestSagun AlmarioPas encore d'évaluation
- Arc Welding ReadingDocument16 pagesArc Welding ReadingJessica S. MellPas encore d'évaluation
- A Study of Effect of Groove Angle On Angular Distortion and Impact Strength Inbutt Weld PDFDocument3 pagesA Study of Effect of Groove Angle On Angular Distortion and Impact Strength Inbutt Weld PDFEmad A.AhmadPas encore d'évaluation
- Technical Basis and Application of New Rules On Fracture PDFDocument8 pagesTechnical Basis and Application of New Rules On Fracture PDFEmad A.AhmadPas encore d'évaluation
- Ten-Questions-That-Must-Be-Answered-Befor 1 PDFDocument4 pagesTen-Questions-That-Must-Be-Answered-Befor 1 PDFEmad A.AhmadPas encore d'évaluation
- Omputer Based Welding Training System PDFDocument10 pagesOmputer Based Welding Training System PDFEmad A.AhmadPas encore d'évaluation
- WJ 1974 09 s401 PDFDocument10 pagesWJ 1974 09 s401 PDFEmad A.AhmadPas encore d'évaluation
- Piping Vibration Screening PDFDocument3 pagesPiping Vibration Screening PDFEmad A.AhmadPas encore d'évaluation
- Piping Vibration Screening PDFDocument3 pagesPiping Vibration Screening PDFEmad A.AhmadPas encore d'évaluation
- Ten Questions That Must Be Answered BeforDocument3 pagesTen Questions That Must Be Answered BeforEmad A.AhmadPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
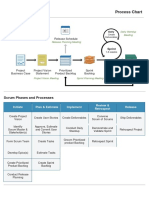
- Procesos SCRUMDocument2 pagesProcesos SCRUMRosePas encore d'évaluation
- Error Codes Samsung SL Fin 501l 502lDocument33 pagesError Codes Samsung SL Fin 501l 502lcesar salasPas encore d'évaluation
- Nupack User Guide 3.2Document44 pagesNupack User Guide 3.2Dicastelgandolfo VchPas encore d'évaluation
- Chapter 14 - Storm and Sanitary Analysis PDFDocument41 pagesChapter 14 - Storm and Sanitary Analysis PDFdobridorinPas encore d'évaluation
- Module 3 Density Altitude ExperimentDocument3 pagesModule 3 Density Altitude ExperimentIvan100% (1)
- Nirma University Institute of Technology B.Tech. in Mechanical Engineering Semester IVDocument2 pagesNirma University Institute of Technology B.Tech. in Mechanical Engineering Semester IVKartik aminPas encore d'évaluation
- Lldpe Petrothene Ga502-024Document2 pagesLldpe Petrothene Ga502-024Noe floresPas encore d'évaluation
- RISC Vs CISCDocument13 pagesRISC Vs CISCBehin SamPas encore d'évaluation
- Noise and VibrationDocument14 pagesNoise and VibrationABHISHEK V GOWDAPas encore d'évaluation
- ReportDocument13 pagesReportMamta SindhuPas encore d'évaluation
- Check ListDocument6 pagesCheck ListosersPas encore d'évaluation
- Apollo Experience Report Electronic Systems Test Program Accomplishments and ResultsDocument70 pagesApollo Experience Report Electronic Systems Test Program Accomplishments and ResultsBob AndrepontPas encore d'évaluation
- Aip Enr 2.1-1 India 1 Aug 2007Document28 pagesAip Enr 2.1-1 India 1 Aug 2007itsrijoPas encore d'évaluation
- Training CoursesDocument16 pagesTraining CoursesFeroz KhanPas encore d'évaluation
- EBS Data MaskingDocument31 pagesEBS Data MaskingNawab ShariefPas encore d'évaluation
- Safety Inventory ExercisesDocument12 pagesSafety Inventory ExercisesParnabho KunduPas encore d'évaluation
- American University of Beirut Aub Thesis TemplateDocument12 pagesAmerican University of Beirut Aub Thesis TemplateHassane EzzeddinePas encore d'évaluation
- AC ResumeDocument2 pagesAC Resumesampaguita_r7166Pas encore d'évaluation
- Spirent TestCenter Automation Obj RefDocument3 210 pagesSpirent TestCenter Automation Obj Refokie11Pas encore d'évaluation
- Hepworth Clay DoPs - Full SetDocument54 pagesHepworth Clay DoPs - Full SetAnonymous XYAPaxjbYPas encore d'évaluation
- DW-143 - Leakage Factor As Per Calculation FormulaDocument2 pagesDW-143 - Leakage Factor As Per Calculation Formulasandeep7426Pas encore d'évaluation
- Muhammad Akif Naeem Open Ended Lab Signals and SystemDocument20 pagesMuhammad Akif Naeem Open Ended Lab Signals and SystemMuhammad Akif NaeemPas encore d'évaluation
- Bolts TheoryDocument30 pagesBolts TheoryIbrahim Mesfin100% (1)
- Unit-1 - Spur Gears - Lecture - 6 - Problems Spur Gear - Mahesh GaikwadDocument13 pagesUnit-1 - Spur Gears - Lecture - 6 - Problems Spur Gear - Mahesh GaikwadNikhil JadhavPas encore d'évaluation
- SavcaEugeniu (CV) byDocument4 pagesSavcaEugeniu (CV) bySavcaPas encore d'évaluation
- Catapult Ref ManDocument372 pagesCatapult Ref ManBiplab RoyPas encore d'évaluation
- PR RTXDocument27 pagesPR RTXletanbaospkt06100% (1)
- Cryptographic Systems Tend To Involve Both Algorithm and ADocument6 pagesCryptographic Systems Tend To Involve Both Algorithm and APawan Kumar ThakurPas encore d'évaluation
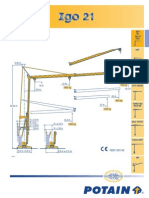
- Potain Igo 21 PDFDocument4 pagesPotain Igo 21 PDFMarco CruzPas encore d'évaluation
- NEMA Premium CatalogDocument38 pagesNEMA Premium CatalogPedro SanchezPas encore d'évaluation