Vous aimerez peut-être aussi
- 4 - SDOF - Periodic LoadingDocument8 pages4 - SDOF - Periodic Loadingkhurram864100% (1)
- Pond Heat Losses PDFDocument4 pagesPond Heat Losses PDFMiguel MurilloPas encore d'évaluation
- 2152014141658clinicalmethods 1 PDFDocument10 pages2152014141658clinicalmethods 1 PDFKay BristolPas encore d'évaluation
- Barlow's FormulaDocument2 pagesBarlow's FormularsproservPas encore d'évaluation
- Sand Cushion: 1. IntroductionDocument2 pagesSand Cushion: 1. Introductionlokesh nandinaPas encore d'évaluation
- Steep Reinforced SlopesDocument35 pagesSteep Reinforced SlopesOanaPas encore d'évaluation
- As-11WI-6 Blast Resistant Design ConsiderationsDocument4 pagesAs-11WI-6 Blast Resistant Design ConsiderationsjausingchiPas encore d'évaluation
- BS Iec Iee-56486979874967Document25 pagesBS Iec Iee-56486979874967ramasamy2012Pas encore d'évaluation
- Beam Design Summary: Material and Design DataDocument2 pagesBeam Design Summary: Material and Design DatamalsrinivasanPas encore d'évaluation
- WeldDocument43 pagesWeldAuggie AranzadoPas encore d'évaluation
- Is.4544.2000 0Document17 pagesIs.4544.2000 0Davorin IvićPas encore d'évaluation
- Dynamic Magnification Factor For Impact LoadDocument7 pagesDynamic Magnification Factor For Impact LoadAbukalam MullaPas encore d'évaluation
- CompressorDocument10 pagesCompressorArjun Shantaram ZopePas encore d'évaluation
- Disclosure To Promote The Right To InformationDocument47 pagesDisclosure To Promote The Right To InformationvivekPas encore d'évaluation
- Blast Resistant Design of Reinforced Concrete WallDocument6 pagesBlast Resistant Design of Reinforced Concrete WallAmin ZuraiqiPas encore d'évaluation
- PLAXIS 2023.1 Barcelona Basic ModelDocument54 pagesPLAXIS 2023.1 Barcelona Basic ModelHuy Hiep NguyenPas encore d'évaluation
- Shear Failure of Bolted Joints - ME 372 Lab: Bolt DataDocument1 pageShear Failure of Bolted Joints - ME 372 Lab: Bolt Databoo huPas encore d'évaluation
- Eye Bolt CalculationDocument4 pagesEye Bolt CalculationAlok KumarPas encore d'évaluation
- Footings - Rectangular Spread Footing AnalysisDocument8 pagesFootings - Rectangular Spread Footing Analysisdicktracy11Pas encore d'évaluation
- (26-28) SGP Pipe SteelDocument3 pages(26-28) SGP Pipe SteelSugi ZhuangPas encore d'évaluation
- Site Response AnalysisDocument263 pagesSite Response Analysismark_torreonPas encore d'évaluation
- Analysis of Multi-Storey RC Building Subjected To Blast Load Using Time History MethodDocument7 pagesAnalysis of Multi-Storey RC Building Subjected To Blast Load Using Time History MethodAnonymous izrFWiQPas encore d'évaluation
- TP20 Morales PDFDocument10 pagesTP20 Morales PDFJefreyMatuanMondranoPas encore d'évaluation
- Concreto - Bi - Handbook of Machine FoundationsDocument249 pagesConcreto - Bi - Handbook of Machine FoundationsRafael GarciaPas encore d'évaluation
- TP19 Adiaz PDFDocument11 pagesTP19 Adiaz PDFJefreyMatuanMondranoPas encore d'évaluation
- 1 Sustainable Asphalt Intro WebDocument31 pages1 Sustainable Asphalt Intro WebNasrulPas encore d'évaluation
- Fatigue Analysis and Repair of A High Mast Light Pole: SynopsisDocument14 pagesFatigue Analysis and Repair of A High Mast Light Pole: SynopsisjaffliangPas encore d'évaluation
- RCC Chimney - CICIND CommentaryDocument65 pagesRCC Chimney - CICIND CommentaryVasanth KumarPas encore d'évaluation
- TG Steel Struc PIII v5Document88 pagesTG Steel Struc PIII v56BisnagaPas encore d'évaluation
- Determination of P-Y Curves For Offshore PilesDocument8 pagesDetermination of P-Y Curves For Offshore PilesRamanathan GnanasambandamPas encore d'évaluation
- Measurement Liquid Flow Closed Conduits Transit-Time Ultrasonic FlowmetersDocument21 pagesMeasurement Liquid Flow Closed Conduits Transit-Time Ultrasonic FlowmetersJoel CieltoPas encore d'évaluation
- 8 Vertical Stresses Below Applied LoadsDocument13 pages8 Vertical Stresses Below Applied LoadsSaša MarinPas encore d'évaluation
- General Update of The ASCE Report-Design of Blast Resistant Buildings in Petrochemical FacilitiesDocument4 pagesGeneral Update of The ASCE Report-Design of Blast Resistant Buildings in Petrochemical FacilitiesKevin C. Nair100% (1)
- CE 809 - Lecture 6 - Response of SDF Systems To General Dynamic LoadingDocument45 pagesCE 809 - Lecture 6 - Response of SDF Systems To General Dynamic LoadingArslan UmarPas encore d'évaluation
- RT Pit PDFDocument35 pagesRT Pit PDFBalachandar ArumugamPas encore d'évaluation
- Response of Soils To Dynamic LoadingsDocument238 pagesResponse of Soils To Dynamic LoadingsxxxxPas encore d'évaluation
- ACI 437 R - 91 American Concrete InstituteDocument24 pagesACI 437 R - 91 American Concrete Instituteabdulrehman731Pas encore d'évaluation
- DIN 1055 6 2005silos - Parte2Document15 pagesDIN 1055 6 2005silos - Parte2Angel AlvarezPas encore d'évaluation
- Stability Analysis of Pipe Rack in Petrochemical Facilities-IJAERDV04I0264348Document11 pagesStability Analysis of Pipe Rack in Petrochemical Facilities-IJAERDV04I0264348Editor IJAERDPas encore d'évaluation
- Comprehensive Step by Step Calculations For Retaining Wall Analysis Are Provided BelowDocument15 pagesComprehensive Step by Step Calculations For Retaining Wall Analysis Are Provided BelowLakshmiWijayasiriPas encore d'évaluation
- Vibration of Single Degree of Freedom SystemDocument31 pagesVibration of Single Degree of Freedom SystemEnriqueGDPas encore d'évaluation
- Design Concrete and Steel For Oil and Gas-Online Course - Rev5Document4 pagesDesign Concrete and Steel For Oil and Gas-Online Course - Rev5elreedymanPas encore d'évaluation
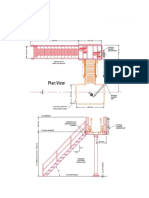
- Truck Loading Platform With Mounting GangwayDocument1 pageTruck Loading Platform With Mounting GangwayprasongPas encore d'évaluation
- Cemtec AL PU CoatingDocument2 pagesCemtec AL PU CoatingPageduesca RouelPas encore d'évaluation
- C-FC-01-Liquid Tightness Design of LNG Storage Tank Incorporating Cryogenic Temperature-Induced StressesDocument8 pagesC-FC-01-Liquid Tightness Design of LNG Storage Tank Incorporating Cryogenic Temperature-Induced StressesManoj KanadiaPas encore d'évaluation
- Difference Between Working Stress Method and Limit State MethodDocument5 pagesDifference Between Working Stress Method and Limit State MethodDeep DebnathPas encore d'évaluation
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagotePas encore d'évaluation
- Review On Analysis and Design of RCC Cooling Tower Using STAAD-ProDocument7 pagesReview On Analysis and Design of RCC Cooling Tower Using STAAD-ProIJRASETPublicationsPas encore d'évaluation
- Lifting Appliances Guide Oct18Document234 pagesLifting Appliances Guide Oct18Melvin Leong100% (1)
- Mathcad - Control Room - Depth 3mDocument14 pagesMathcad - Control Room - Depth 3mJuli NirwantoPas encore d'évaluation
- Model For Indirect Determination of The Tensile Stree-Strain Curve Carmona2012Document13 pagesModel For Indirect Determination of The Tensile Stree-Strain Curve Carmona2012MICHAEL MWONGAPas encore d'évaluation
- SteelDesign LTB Fu NewDocument36 pagesSteelDesign LTB Fu Newjuan victorPas encore d'évaluation
- Numerical Evaluation of Dynamic ResponseDocument20 pagesNumerical Evaluation of Dynamic Responsemacynthia26Pas encore d'évaluation
- 6-General Dynamic LoadingDocument34 pages6-General Dynamic Loadingahmad riyantoPas encore d'évaluation
- L6 - Numerical Evaluation of Dynamic ResponseDocument41 pagesL6 - Numerical Evaluation of Dynamic ResponseRobinson IdarragaPas encore d'évaluation
- First and Second Order SystemsDocument73 pagesFirst and Second Order SystemsCristian Mateo Ovalle CifuentesPas encore d'évaluation
- Peric LecturesDocument32 pagesPeric Lecturesluis_rcm161405Pas encore d'évaluation
- 3 - Time Response AnalysisDocument24 pages3 - Time Response Analysisahmed4665Pas encore d'évaluation
- AME 301 Final ReviewDocument11 pagesAME 301 Final ReviewSyed Shahidul HasanPas encore d'évaluation
- Abu Huraira UrduDocument155 pagesAbu Huraira UrduGhazi AbbasPas encore d'évaluation
- Instrum enDocument313 pagesInstrum enBobby WskPas encore d'évaluation
- 7 - SDOF - General SDOF SystemsDocument18 pages7 - SDOF - General SDOF Systemskhurram864Pas encore d'évaluation
- 14 Maslay - Molana Abdul Kareem MushtaqDocument89 pages14 Maslay - Molana Abdul Kareem Mushtaqبندہء خداPas encore d'évaluation
- Slab On Grade: Tahir M. AkramDocument22 pagesSlab On Grade: Tahir M. Akramkhurram864Pas encore d'évaluation
- Engineering Hydrology: Submitted ToDocument1 pageEngineering Hydrology: Submitted Tokhurram864Pas encore d'évaluation
- AutoCAD 3D 2007Document34 pagesAutoCAD 3D 2007Faiz Ahmad100% (2)
- CGPA Conversion FormulaDocument2 pagesCGPA Conversion Formulakhurram864Pas encore d'évaluation
- Dua Shab e JummaDocument1 pageDua Shab e JummaZai100% (1)
- Fulbright 2014 AppDocument23 pagesFulbright 2014 Appkhurram864Pas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- SalinityDocument20 pagesSalinitykhurram864Pas encore d'évaluation
- WaterresourcesEnggManagementDocument21 pagesWaterresourcesEnggManagementkhurram864Pas encore d'évaluation
- VB NotesDocument14 pagesVB NotesGachagua Lastborn50% (2)
- Heart Attack Detection ReportDocument67 pagesHeart Attack Detection ReportAkhil TejaPas encore d'évaluation
- Major Chnage at Tata TeaDocument36 pagesMajor Chnage at Tata Teasheetaltandon100% (1)
- Paper 11-ICOSubmittedDocument10 pagesPaper 11-ICOSubmittedNhat Tan MaiPas encore d'évaluation
- Chapter5A TorqueDocument32 pagesChapter5A TorqueShuq Faqat al-FansuriPas encore d'évaluation
- Recent Advances in Dielectric-Resonator Antenna TechnologyDocument14 pagesRecent Advances in Dielectric-Resonator Antenna Technologymarceloassilva7992Pas encore d'évaluation
- Couvade SyndromeDocument5 pagesCouvade SyndromejudssalangsangPas encore d'évaluation
- Nurses Guide To Family Assessment and InterventionDocument9 pagesNurses Guide To Family Assessment and InterventionKaye CorPas encore d'évaluation
- Guide For Sustainable Design of NEOM CityDocument76 pagesGuide For Sustainable Design of NEOM Cityxiaowei tuPas encore d'évaluation
- Jmac TempDocument5 pagesJmac TempDan GerPas encore d'évaluation
- Mywizard For AIOps - Virtual Agent (ChatBOT)Document27 pagesMywizard For AIOps - Virtual Agent (ChatBOT)Darío Aguirre SánchezPas encore d'évaluation
- Inglês - Advérbios - Adverbs.Document18 pagesInglês - Advérbios - Adverbs.KhyashiPas encore d'évaluation
- Curriculum Vitae: Educational Background Certification Major Name of Institute PeriodDocument2 pagesCurriculum Vitae: Educational Background Certification Major Name of Institute PeriodTHEVINESHPas encore d'évaluation
- Solving Systems of Linear Equations in Three Variables: You Should LearnDocument8 pagesSolving Systems of Linear Equations in Three Variables: You Should LearnTheodore JoaquinnPas encore d'évaluation
- Applications PDFDocument90 pagesApplications PDFahmedPas encore d'évaluation
- Archetypal Approach To Macbeth by William ShakespeareDocument9 pagesArchetypal Approach To Macbeth by William ShakespeareLenka Koutná100% (1)
- CHAPTER THREE-Teacher's PetDocument3 pagesCHAPTER THREE-Teacher's PetTaylor ComansPas encore d'évaluation
- 06.21.2010 - Historic Treasure of Jewish Life and Culture Gifted To UC BerkeleyDocument2 pages06.21.2010 - Historic Treasure of Jewish Life and Culture Gifted To UC BerkeleymagnesmuseumPas encore d'évaluation
- Case Study On "Unilever in Brazil-Marketing Strategies For Low Income Consumers "Document15 pagesCase Study On "Unilever in Brazil-Marketing Strategies For Low Income Consumers "Deepak BajpaiPas encore d'évaluation
- Sheridan Specialized Building Products LLC - Queue Solutions Commercial Proposal by SeQure TechnologiesDocument6 pagesSheridan Specialized Building Products LLC - Queue Solutions Commercial Proposal by SeQure Technologiessailesh psPas encore d'évaluation
- LADP HPDocument11 pagesLADP HPrupeshsoodPas encore d'évaluation
- Exchange 2010 UnderstandDocument493 pagesExchange 2010 UnderstandSeKoFiePas encore d'évaluation
- Abhishek Parmar: Personal DetailsDocument2 pagesAbhishek Parmar: Personal DetailsabhishekparmarPas encore d'évaluation
- Grade 8 Least Mastered Competencies Sy 2020-2021: Handicraft Making Dressmaking CarpentryDocument9 pagesGrade 8 Least Mastered Competencies Sy 2020-2021: Handicraft Making Dressmaking CarpentryHJ HJPas encore d'évaluation
- MARKETING STUDY EditedDocument48 pagesMARKETING STUDY EditedRichard Rhamil Carganillo Garcia Jr.Pas encore d'évaluation
- Transmittal Sheet 1808-T-RJ-PJ-099SDocument2 pagesTransmittal Sheet 1808-T-RJ-PJ-099SMuhammad AzkaPas encore d'évaluation
- Amazon VS WalmartDocument5 pagesAmazon VS WalmartBrandy M. Twilley100% (1)
- Auditing Theory Auditing in A Computer Information Systems (Cis) EnvironmentDocument32 pagesAuditing Theory Auditing in A Computer Information Systems (Cis) EnvironmentMajoy BantocPas encore d'évaluation
- Fortigate System Admin 40 Mr2Document115 pagesFortigate System Admin 40 Mr2KhaleelPas encore d'évaluation
- Math 10 Week 3-4Document2 pagesMath 10 Week 3-4Rustom Torio QuilloyPas encore d'évaluation