Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Types of Electric Motors ExplainedDocument10 pagesTypes of Electric Motors ExplainedprincegirishPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Electrical Machine Drives Fundamental Basics and PracticeDocument403 pagesElectrical Machine Drives Fundamental Basics and Practicedelta_scope100% (3)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- AURETR130 - Assessment 1 - Written Knowledge Questions - V3Document22 pagesAURETR130 - Assessment 1 - Written Knowledge Questions - V3MUHAMMAD UMAR100% (1)
- DC Generator Types and Components ExplainedDocument35 pagesDC Generator Types and Components ExplainedRiyadh Al Nur100% (4)
- GER4212 GE Generator Rotor Design Ops Issues Refubishment OptionsDocument28 pagesGER4212 GE Generator Rotor Design Ops Issues Refubishment OptionsAli GhulamPas encore d'évaluation
- 2 - Generator Model Validation PDFDocument62 pages2 - Generator Model Validation PDFRaihan KamilPas encore d'évaluation
- Lesson 15 - Electrical TheoryDocument37 pagesLesson 15 - Electrical Theorybantu1000100% (1)
- MCQ DC Machines MasterDocument16 pagesMCQ DC Machines MasterDeepak Choudhary DCPas encore d'évaluation
- Current & Hysteresis Losses (4) Same Value For Any Type of CoreDocument38 pagesCurrent & Hysteresis Losses (4) Same Value For Any Type of CoreDeepak Choudhary DCPas encore d'évaluation
- Alternator Operation and Design PrinciplesDocument3 pagesAlternator Operation and Design PrinciplesRushikesh Ramesh KatorePas encore d'évaluation
- Act 2 - 1 Gen Síncrono MaqEle - II 2023Document34 pagesAct 2 - 1 Gen Síncrono MaqEle - II 2023Héctor Manuel Bobadilla PimientaPas encore d'évaluation
- Eddy Current DrivesDocument36 pagesEddy Current DrivesBenedict EromoselePas encore d'évaluation
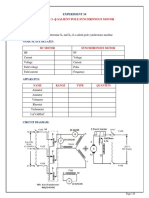
- Emec-Ii Experiment Manual: Nri Institute of Information Science & TechnologyDocument26 pagesEmec-Ii Experiment Manual: Nri Institute of Information Science & Technologysadeeskumar.dPas encore d'évaluation
- Slip Test On Salient Pole MachineDocument3 pagesSlip Test On Salient Pole Machinedeepak reddyPas encore d'évaluation
- Design and Simulation of A Servo-Drive Motor Using ANSYS ElectromagneticsDocument13 pagesDesign and Simulation of A Servo-Drive Motor Using ANSYS ElectromagneticsMustafa AlhumayrePas encore d'évaluation
- Lancer Evolution 8 DiagramsDocument44 pagesLancer Evolution 8 DiagramsLuis Guillermo Ledezma CastroPas encore d'évaluation
- DC GeneratorDocument35 pagesDC GeneratorMohammed Jalaluddin RayeenPas encore d'évaluation
- Electrical Machine Review QuestionsDocument2 pagesElectrical Machine Review QuestionsMarion AlyssaPas encore d'évaluation
- Andi Adriani Adiwijaya - 201971048 - 6BB - Modul 2 - Mesin AsDocument11 pagesAndi Adriani Adiwijaya - 201971048 - 6BB - Modul 2 - Mesin AsAndi Adriani AdiwijayaPas encore d'évaluation
- Turbo Generator & Exciter BHEL Haridwar: A PresentationonDocument15 pagesTurbo Generator & Exciter BHEL Haridwar: A Presentationonraspberry piPas encore d'évaluation
- Design of Speed Control Circuit For Adams MotorDocument6 pagesDesign of Speed Control Circuit For Adams MotorCris VillarPas encore d'évaluation
- Machine Model GENTPFDocument3 pagesMachine Model GENTPFManuelPas encore d'évaluation
- DC MOTOR STARTER TYPESDocument6 pagesDC MOTOR STARTER TYPESGANESH KUMAR B eee2018Pas encore d'évaluation
- A Novel Flux Based Method For Synchronous Generator Loss of ExcitationDocument14 pagesA Novel Flux Based Method For Synchronous Generator Loss of ExcitationhmortPas encore d'évaluation
- Expt 1 DC Machine Using SimulinkDocument10 pagesExpt 1 DC Machine Using SimulinkGG wpPas encore d'évaluation
- MHP Electrical ComponentDocument60 pagesMHP Electrical ComponentSandip DePas encore d'évaluation
- Ch-13 DC Motor DrivesDocument32 pagesCh-13 DC Motor Drivessukhbat sodnomdorjPas encore d'évaluation
- 1.elec AppDocument12 pages1.elec AppNishant KamalPas encore d'évaluation
- Unit3 Electrical AppliancesDocument38 pagesUnit3 Electrical Appliances21MEB358 Kunal AryaPas encore d'évaluation
- EE6365 Electrical Lab Syllabus ExperimentsDocument57 pagesEE6365 Electrical Lab Syllabus ExperimentsRaja SekarPas encore d'évaluation