Vous aimerez peut-être aussi
- Some Case Studies on Signal, Audio and Image Processing Using MatlabD'EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabPas encore d'évaluation
- The International Journal of Engineering and Science (The IJES)Document5 pagesThe International Journal of Engineering and Science (The IJES)theijesPas encore d'évaluation
- Average FilteringDocument22 pagesAverage Filtering7204263474Pas encore d'évaluation
- An Improved Switching Median Filter For Uniformly Distributed Impulse Noise RemovalDocument3 pagesAn Improved Switching Median Filter For Uniformly Distributed Impulse Noise RemovalseselalalalPas encore d'évaluation
- Echo Cancellation in Audio Signal Using LMS AlgorithmDocument6 pagesEcho Cancellation in Audio Signal Using LMS AlgorithmVa SuPas encore d'évaluation
- Applications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezDocument19 pagesApplications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezguyoaserPas encore d'évaluation
- Adaptive Variable: Window Algorithm For Transformer Differential Protection RelayDocument5 pagesAdaptive Variable: Window Algorithm For Transformer Differential Protection RelayproteccionesPas encore d'évaluation
- IIR Filter Design and Analysis Using Notch and Comb FilterDocument4 pagesIIR Filter Design and Analysis Using Notch and Comb FilterijsretPas encore d'évaluation
- Documention TheoryDocument72 pagesDocumention TheorySaNtosh KomakulaPas encore d'évaluation
- Median Filters Theory and ApplicationsDocument5 pagesMedian Filters Theory and Applicationsprasannakumar_7Pas encore d'évaluation
- LMS and RLS Based Adaptive Filter Design For Different SignalsDocument5 pagesLMS and RLS Based Adaptive Filter Design For Different SignalsijeteeditorPas encore d'évaluation
- Median Filtering Frameworks and Their Application To Image EnhancementDocument4 pagesMedian Filtering Frameworks and Their Application To Image EnhancementInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Dcs Project1Document13 pagesDcs Project1Sujeet KumarPas encore d'évaluation
- Master of Technology in Electronics & Communication EngineeringDocument3 pagesMaster of Technology in Electronics & Communication EngineeringAnupam PriyamPas encore d'évaluation
- Echo Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BDocument5 pagesEcho Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BPrabira Kumar SethyPas encore d'évaluation
- Springer 1Document7 pagesSpringer 1Dimple BansalPas encore d'évaluation
- World's Largest Science, Technology & Medicine Open Access Book PublisherDocument38 pagesWorld's Largest Science, Technology & Medicine Open Access Book PublisherSanti AgoPas encore d'évaluation
- Real Time DSP: Professors: Eng. Julian Bruno Eng. Mariano Llamedo SoriaDocument29 pagesReal Time DSP: Professors: Eng. Julian Bruno Eng. Mariano Llamedo SoriaAli AkbarPas encore d'évaluation
- An Improved Adaptive Median Filtering Method For Impulse Noise Detection - 2009Document5 pagesAn Improved Adaptive Median Filtering Method For Impulse Noise Detection - 2009Khánh NguyễnPas encore d'évaluation
- Estimation, Filtering and Adaptive ProcessesDocument135 pagesEstimation, Filtering and Adaptive Processesmehdicheraghi506Pas encore d'évaluation
- DSP-Chapter4 Student 11012016Document32 pagesDSP-Chapter4 Student 11012016Lưu Văn HóaPas encore d'évaluation
- Comparative Evaluation of Filters For Liver Ultrasound Image EnhancementDocument5 pagesComparative Evaluation of Filters For Liver Ultrasound Image EnhancementInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Sipij 040304Document12 pagesSipij 040304sipijPas encore d'évaluation
- Voice Command Recognition System Based On MFCC and DTW: Anjali BalaDocument8 pagesVoice Command Recognition System Based On MFCC and DTW: Anjali BalaAbhijeet KumarPas encore d'évaluation
- Adaptive Filters-3Document18 pagesAdaptive Filters-3deepaPas encore d'évaluation
- Mitra Ch13 3edDocument9 pagesMitra Ch13 3edMohammad Khairul Halim RimonPas encore d'évaluation
- Fpga Implementation of Noise Cancellatio PDFDocument8 pagesFpga Implementation of Noise Cancellatio PDFLuis Oliveira SilvaPas encore d'évaluation
- Digital Filters Digital Filters Digital Filters Digital Filters Digital Filters 55555Document54 pagesDigital Filters Digital Filters Digital Filters Digital Filters Digital Filters 55555arundevtibibocomPas encore d'évaluation
- Analysis and Simulation of System Identification Based On LMS Adaptive Filtering AlgorithmDocument5 pagesAnalysis and Simulation of System Identification Based On LMS Adaptive Filtering AlgorithmSEP-PublisherPas encore d'évaluation
- Eecs 967 - Project Mmse Multiuser Detection: Vijaya Chandran Ramasami (Kuid 698659)Document34 pagesEecs 967 - Project Mmse Multiuser Detection: Vijaya Chandran Ramasami (Kuid 698659)Aseem RaseedPas encore d'évaluation
- Echo Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoDocument25 pagesEcho Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoÈmøñ AlesandЯo KhanPas encore d'évaluation
- Cascaded LmsDocument25 pagesCascaded LmsAkilesh MDPas encore d'évaluation
- Elec9123 DSP DesignDocument7 pagesElec9123 DSP DesignSydney FinestPas encore d'évaluation
- Ultrasonic Signal De-Noising Using Dual Filtering AlgorithmDocument8 pagesUltrasonic Signal De-Noising Using Dual Filtering Algorithmvhito619Pas encore d'évaluation
- Applications of Multirate DSP To Software RadiosDocument186 pagesApplications of Multirate DSP To Software Radioshaipm1979Pas encore d'évaluation
- DSP 5Document32 pagesDSP 5Jayan GoelPas encore d'évaluation
- Dspa Word FileDocument82 pagesDspa Word FilenithinpogbaPas encore d'évaluation
- Multirate Digital Signal ProcessingDocument11 pagesMultirate Digital Signal ProcessingNandha KumarPas encore d'évaluation
- Possion Noise Removal in MRI Data SetsDocument35 pagesPossion Noise Removal in MRI Data Setskpkarthi80Pas encore d'évaluation
- Performance Analysis of LMS & NLMS Algorithms For Noise CancellationDocument4 pagesPerformance Analysis of LMS & NLMS Algorithms For Noise CancellationijsretPas encore d'évaluation
- Design and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabDocument16 pagesDesign and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabResearch Cell: An International Journal of Engineering SciencesPas encore d'évaluation
- On Root Structures and Convergence Properties of Weighted Median FiltersDocument1 pageOn Root Structures and Convergence Properties of Weighted Median FiltersNacho BMPas encore d'évaluation
- Bogdan Smolka MitDocument8 pagesBogdan Smolka MitNguyễn Khắc HuyPas encore d'évaluation
- Vol2 No1 7Document6 pagesVol2 No1 7Galal NadimPas encore d'évaluation
- Adaptive Lab Matlab Part3Document3 pagesAdaptive Lab Matlab Part3haniaafefPas encore d'évaluation
- Hardware Implementation of Speech Enhancement AlgorithmsDocument3 pagesHardware Implementation of Speech Enhancement AlgorithmsijsretPas encore d'évaluation
- Comparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersDocument5 pagesComparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersInternational Organization of Scientific Research (IOSR)Pas encore d'évaluation
- Progress ReportDocument17 pagesProgress Reportkavita gangwarPas encore d'évaluation
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationPas encore d'évaluation
- Noise Cancellation Using Adaptive Filter"Document5 pagesNoise Cancellation Using Adaptive Filter"kavita gangwarPas encore d'évaluation
- Filtering in Digital CommunicationsDocument23 pagesFiltering in Digital CommunicationsJessi HannaPas encore d'évaluation
- Carrier Frequency Offset Compensation With Successive Cancellation in Uplink OFDMA SystemsDocument5 pagesCarrier Frequency Offset Compensation With Successive Cancellation in Uplink OFDMA SystemsSuman BhardwajPas encore d'évaluation
- Digital Filter Design Using MatlabDocument41 pagesDigital Filter Design Using MatlabKirti Susan VarghesePas encore d'évaluation
- Filter TutorialDocument15 pagesFilter TutorialNikitaPrabhuPas encore d'évaluation
- Weiner FilterDocument35 pagesWeiner FilterSreekanth PagadapalliPas encore d'évaluation
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocument7 pagesAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDPas encore d'évaluation
- Efficient Very Large-Scale Integration Architecture Design of Proportionate-Type Least Mean Square Adaptive FiltersDocument7 pagesEfficient Very Large-Scale Integration Architecture Design of Proportionate-Type Least Mean Square Adaptive FiltersIJRES teamPas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- Analytical Modeling of Wireless Communication SystemsD'EverandAnalytical Modeling of Wireless Communication SystemsPas encore d'évaluation
- 1 s2.0 S0957417413007574 MainDocument9 pages1 s2.0 S0957417413007574 MainAmel HarPas encore d'évaluation
- 20 Vol 67 No 1Document11 pages20 Vol 67 No 1Amel HarPas encore d'évaluation
- Neurocomputing: Jeen-Shing Wang, Wei-Chun Chiang, Yu-Liang Hsu, Ya-Ting C. YangDocument8 pagesNeurocomputing: Jeen-Shing Wang, Wei-Chun Chiang, Yu-Liang Hsu, Ya-Ting C. YangAmel HarPas encore d'évaluation
- A New Met A Heuristic Bat-Inspired AlgorithmDocument10 pagesA New Met A Heuristic Bat-Inspired AlgorithmRed SerranoPas encore d'évaluation
- EmdDocument79 pagesEmdAmel HarPas encore d'évaluation
- MatlabDocument36 pagesMatlabClaudia Ellen IXPas encore d'évaluation
- Ecg Signal Feature Extraction and Classification Based On R Peaks Detection in The Phase SpaceDocument4 pagesEcg Signal Feature Extraction and Classification Based On R Peaks Detection in The Phase SpaceAmel HarPas encore d'évaluation
- ParraSpenceSajda Nips00Document7 pagesParraSpenceSajda Nips00Amel HarPas encore d'évaluation
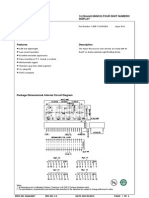
- 14.22mm (0.56INCH) FOUR DIGIT NUMERIC DisplayDocument4 pages14.22mm (0.56INCH) FOUR DIGIT NUMERIC DisplayAmel HarPas encore d'évaluation
- Kendali Digital 5Document13 pagesKendali Digital 5SutantoPas encore d'évaluation
- What Is Posthumanism?Document5 pagesWhat Is Posthumanism?cjlassPas encore d'évaluation
- MCQ Aero ThermodynamicsDocument88 pagesMCQ Aero ThermodynamicskkonthenetPas encore d'évaluation
- Apparel Quality ManagementDocument5 pagesApparel Quality ManagementPoonam PeswaniPas encore d'évaluation
- Wind MeteodynWT CFD Micro Scale Modeling Combined Statistical Learning For Short Term Wind Power ForecastingDocument1 pageWind MeteodynWT CFD Micro Scale Modeling Combined Statistical Learning For Short Term Wind Power ForecastingMeteodyn_EnergyPas encore d'évaluation
- History and Relationships To Other Fields: Timeline of Machine LearningDocument2 pagesHistory and Relationships To Other Fields: Timeline of Machine LearningVarun MalikPas encore d'évaluation
- Most Important Topic and Questions (BCS051)Document3 pagesMost Important Topic and Questions (BCS051)D starPas encore d'évaluation
- Digital Signal Processing Question BankDocument15 pagesDigital Signal Processing Question BankKishore KrishnaPas encore d'évaluation
- ME 010 506 Thermodynamics: Noel Joseph GomezDocument11 pagesME 010 506 Thermodynamics: Noel Joseph GomezmujeebPas encore d'évaluation
- Alarm Philosophy ExampleDocument21 pagesAlarm Philosophy ExampleAbdul Samad50% (2)
- Week 12.1Document14 pagesWeek 12.1Faizan RehmanPas encore d'évaluation
- A Lyapunov Based Model Reference Adaptive Control of A QuadrotorDocument5 pagesA Lyapunov Based Model Reference Adaptive Control of A QuadrotorNaod ZerihunPas encore d'évaluation
- Generative AI For Project ManagersDocument45 pagesGenerative AI For Project ManagersJacinth PaulPas encore d'évaluation
- DSP Imp QuestionsDocument2 pagesDSP Imp QuestionsAnonymous 1Xx4mQcqeTPas encore d'évaluation
- APQPDocument4 pagesAPQPsaini2691985Pas encore d'évaluation
- Requirements and Specification: Part TwoDocument22 pagesRequirements and Specification: Part TwoArvin Anthony Sabido AranetaPas encore d'évaluation
- Meenakshi, Kamal Rawat - Dynamic Programming For Coding Interviews - A Bottom-Up Approach To Problem Solving (2017, Notion Press)Document136 pagesMeenakshi, Kamal Rawat - Dynamic Programming For Coding Interviews - A Bottom-Up Approach To Problem Solving (2017, Notion Press)ApoorvPas encore d'évaluation
- Reliability Calculations: What, Why, When & How Do We Benefit From Them?Document16 pagesReliability Calculations: What, Why, When & How Do We Benefit From Them?Jayson SoguilonPas encore d'évaluation
- Ee3304 hw1 SLNDocument11 pagesEe3304 hw1 SLNzerocoderPas encore d'évaluation
- Block - Diagram Introduction LectureDocument11 pagesBlock - Diagram Introduction LecturezahidPas encore d'évaluation
- QB SoftDocument10 pagesQB Softjoydeep12Pas encore d'évaluation
- Laboratory 10: Identification by The Least-Squares Method: Problem 1Document3 pagesLaboratory 10: Identification by The Least-Squares Method: Problem 1Franco Claudio Antonio Porras YarascaPas encore d'évaluation
- Building Blocks For CaseDocument5 pagesBuilding Blocks For CaseSharmistha Mukherjee60% (5)
- A Survey On Requirements of Future IntelDocument36 pagesA Survey On Requirements of Future IntelArush SinghPas encore d'évaluation
- Test-Driven Development Wikipedia CollectionDocument61 pagesTest-Driven Development Wikipedia CollectionOsvaldo Santana Neto0% (1)
- H InfinityDocument15 pagesH InfinityvenikiranPas encore d'évaluation
- SQA Lecture 1Document55 pagesSQA Lecture 1MuzammilAhmadKhanPas encore d'évaluation
- 19.automatic Bell Alert and Temperature Monitoring SystemDocument3 pages19.automatic Bell Alert and Temperature Monitoring SystemdileeppatraPas encore d'évaluation
- 06507312Document2 pages06507312Ridho IrawanPas encore d'évaluation