Vous aimerez peut-être aussi
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsD'EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsÉvaluation : 3.5 sur 5 étoiles3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Map Sensor Technical SpecificationDocument13 pagesMap Sensor Technical SpecificationEdward Fisher100% (2)
- III-1 & III-2 Specifications Volume 2Document588 pagesIII-1 & III-2 Specifications Volume 2saleem buksh100% (1)
- 1282094111153Document9 pages1282094111153PaperCraft VNPas encore d'évaluation
- Geogrid ReinforcementDocument5 pagesGeogrid ReinforcementphilipyapPas encore d'évaluation
- T83840en PDFDocument6 pagesT83840en PDFshareyhou100% (1)
- NPCP Chapter 2 PDFDocument12 pagesNPCP Chapter 2 PDFbenPas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageD'EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StoragePas encore d'évaluation
- BS 4514 2001 PDFDocument18 pagesBS 4514 2001 PDFanas shehabi100% (1)
- Spent Caustic Treatment Options-Saudi AramcoDocument20 pagesSpent Caustic Treatment Options-Saudi Aramcoonizuka-t22630% (1)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsD'EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsPas encore d'évaluation
- Cathelco ICCP Hull Protection SystemsDocument8 pagesCathelco ICCP Hull Protection SystemsdalianbouriPas encore d'évaluation
- Severn GloconDocument6 pagesSevern GloconAmit Surti0% (1)
- PuneDocument564 pagesPuneANSHUMANPas encore d'évaluation
- General Electric - Inlet Air RecommendationDocument28 pagesGeneral Electric - Inlet Air Recommendationhussain mominPas encore d'évaluation
- MPX10GSDocument9 pagesMPX10GSJoseph BurgosPas encore d'évaluation
- MPX2200Document9 pagesMPX2200Josimar Marquez GarciaPas encore d'évaluation
- MPX200Document8 pagesMPX200Hugo ContrerasPas encore d'évaluation
- MPX10Document9 pagesMPX10rezaPas encore d'évaluation
- Semiconductor Technical Data: Order This Document by MPX2010/DDocument13 pagesSemiconductor Technical Data: Order This Document by MPX2010/DTaTa ArroyavePas encore d'évaluation
- DatasheetDocument8 pagesDatasheetkunal5959Pas encore d'évaluation
- MPX2010Document12 pagesMPX2010Arni IrenawatiPas encore d'évaluation
- MPX2202DDocument19 pagesMPX2202DCristhian Omar Goicochea EscobarPas encore d'évaluation
- Mpx2050 Data SheetDocument9 pagesMpx2050 Data SheetKarthi Manthangudi SellanPas encore d'évaluation
- MPX2053 MPXV2053G DatasheetDocument12 pagesMPX2053 MPXV2053G DatasheetkurmakkPas encore d'évaluation
- MPXV7007Document11 pagesMPXV7007Phi MacPas encore d'évaluation
- MPX2010 PDFDocument17 pagesMPX2010 PDFEnte Bliss OnixPas encore d'évaluation
- MPX4100ASDocument9 pagesMPX4100ASFahriz D. AuliaPas encore d'évaluation
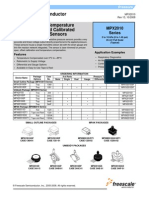
- Freescale Semiconductor Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and CalibratedDocument22 pagesFreescale Semiconductor Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and CalibratedRafanuñez RodriguezPas encore d'évaluation
- MPX5050 PDFDocument18 pagesMPX5050 PDFKurniaBagusPas encore d'évaluation
- MPX4250Document9 pagesMPX4250mohsihummerPas encore d'évaluation
- MPX5010Document16 pagesMPX5010Arsonval FleuryPas encore d'évaluation
- MPX5500 Sensor de Presion para ArduinoDocument7 pagesMPX5500 Sensor de Presion para ArduinoMarvin Melendez VanegasPas encore d'évaluation
- Mpx4250ap PDFDocument8 pagesMpx4250ap PDFLeonard OnsikPas encore d'évaluation
- MPX10DPDocument8 pagesMPX10DPsuperpuma86Pas encore d'évaluation
- MPX5700Document11 pagesMPX5700frederypsPas encore d'évaluation
- Datasheet MPX5100DPDocument16 pagesDatasheet MPX5100DPKemahyanto Exaudi SiahaanPas encore d'évaluation
- Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and CalibratedDocument11 pagesIntegrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and Calibratedsuri_girishPas encore d'évaluation
- MPX5100Document17 pagesMPX5100Andri PaoPas encore d'évaluation
- Freescale Semiconductor Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and CalibratedDocument7 pagesFreescale Semiconductor Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and CalibratedJavier GuzmánPas encore d'évaluation
- MPX5700Document11 pagesMPX5700mardonioandradePas encore d'évaluation
- Semiconductor Technical Data: Integrated Pressure Sensor 0 To 10 Kpa (0 To 1.45 Psi) 0.2 To 4.7 V OutputDocument11 pagesSemiconductor Technical Data: Integrated Pressure Sensor 0 To 10 Kpa (0 To 1.45 Psi) 0.2 To 4.7 V Outputjose ulloaPas encore d'évaluation
- Freescale Semiconductor Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and CalibratedDocument10 pagesFreescale Semiconductor Integrated Silicon Pressure Sensor On-Chip Signal Conditioned, Temperature Compensated and Calibrateddafs10Pas encore d'évaluation
- MPX5010 PDFDocument17 pagesMPX5010 PDFAdán LópezPas encore d'évaluation
- MPX4115 (Sensor Presion)Document10 pagesMPX4115 (Sensor Presion)Ricardo Xavier Otazo LópezPas encore d'évaluation
- Data Sheet Motorola SensorDocument6 pagesData Sheet Motorola SensorLuis Angel BaldenegroPas encore d'évaluation
- Data Sheet - MPX5050DPDocument18 pagesData Sheet - MPX5050DPRudi SetiyawanPas encore d'évaluation
- MPX5050DP DatasheettDocument12 pagesMPX5050DP DatasheettCulun HabisPas encore d'évaluation
- MPX4250ADocument11 pagesMPX4250ARenivaldoPas encore d'évaluation
- Motorola MPX5700-Series Pressure Sensor PDFDocument9 pagesMotorola MPX5700-Series Pressure Sensor PDFIvo AlvesPas encore d'évaluation
- 040shj60h8k5a4yex8yk4dhwa53y PDFDocument9 pages040shj60h8k5a4yex8yk4dhwa53y PDFRenivaldoPas encore d'évaluation
- MPXHZ6115ADocument17 pagesMPXHZ6115Ad.c.delatorre2200Pas encore d'évaluation
- MPX 4115Document8 pagesMPX 4115Mohamed AwadPas encore d'évaluation
- Multi Vision 2020TG/TA: Digital Transmitters With Remote Seals For Gauge / Absolute Pressure and LevelDocument22 pagesMulti Vision 2020TG/TA: Digital Transmitters With Remote Seals For Gauge / Absolute Pressure and LevelMasroor RasoolPas encore d'évaluation
- MPXA4511A Pressure SensorDocument9 pagesMPXA4511A Pressure SensorGiuseppe ZangariPas encore d'évaluation
- SensorDocument6 pagesSensorFarhan ZafarPas encore d'évaluation
- ASDX Pressure SensorDocument6 pagesASDX Pressure SensorGuilherme VilaçaPas encore d'évaluation
- General Specifications: EJX118A Diaphragm Sealed Differential Pressure TransmitterDocument20 pagesGeneral Specifications: EJX118A Diaphragm Sealed Differential Pressure TransmitterapisituPas encore d'évaluation
- PT SiemensDocument82 pagesPT SiemensAnthony AdamsPas encore d'évaluation
- Barometer Mpx2100apDocument10 pagesBarometer Mpx2100apVurdalack666Pas encore d'évaluation
- Pressure Sensor ModulesDocument3 pagesPressure Sensor Modulesphani22Pas encore d'évaluation
- Traductor de PresiuneDocument22 pagesTraductor de PresiuneCamelia PăduraruPas encore d'évaluation
- GS01C25B01 01eDocument14 pagesGS01C25B01 01epredrag123Pas encore d'évaluation
- Argus General Brochure V8Document20 pagesArgus General Brochure V8danieldayettddPas encore d'évaluation
- Manual Catia V5 R12Document262 pagesManual Catia V5 R12Leandro SebastiánPas encore d'évaluation
- 66210-76110-76115 Weathercoat GP. Water ProofingDocument2 pages66210-76110-76115 Weathercoat GP. Water ProofingUpulHettiarachchiPas encore d'évaluation
- Hanser BooksDocument30 pagesHanser Bookshabiba jamilPas encore d'évaluation
- Level 3 Post Emulsifiable Fluorescent Penetrant: Product Data SheetDocument2 pagesLevel 3 Post Emulsifiable Fluorescent Penetrant: Product Data SheetAnand AmanPas encore d'évaluation
- Stud Welding Instruction ManualDocument5 pagesStud Welding Instruction Manualedwin jimenezPas encore d'évaluation
- Sc. Cl. - 001 - SAR0214HFESL-F3 (IE) CDocument1 pageSc. Cl. - 001 - SAR0214HFESL-F3 (IE) CSudarshika SumathipalaPas encore d'évaluation
- Capstone Report On Wheel Chair Cum StretcherDocument40 pagesCapstone Report On Wheel Chair Cum StretcherRakesh Moparthi100% (1)
- Comfort & Harmony: Bouncer Asiento Transat Wiegewippe Balanço-bercinho кресло-качалкаDocument28 pagesComfort & Harmony: Bouncer Asiento Transat Wiegewippe Balanço-bercinho кресло-качалкаJohn SmithPas encore d'évaluation
- Delayed CokingDocument7 pagesDelayed CokingMatheus RodriguesPas encore d'évaluation
- TD Operators ManualDocument84 pagesTD Operators Manualsivan_sg1800Pas encore d'évaluation
- Experiment 1Document4 pagesExperiment 1Kathrine E. BautistaPas encore d'évaluation
- Specifications Virgin Fuel Oil D6: Method Units Test Result UnitDocument1 pageSpecifications Virgin Fuel Oil D6: Method Units Test Result UnitDavid garzaPas encore d'évaluation
- A560 - Castings Chromium Nickel AlloyDocument3 pagesA560 - Castings Chromium Nickel AlloychemtausifPas encore d'évaluation
- Summer Internship At: Haldia Petrochemicals LTDDocument11 pagesSummer Internship At: Haldia Petrochemicals LTDJyoti PrakashPas encore d'évaluation
- Dow Therm J SpecificationsDocument28 pagesDow Therm J SpecificationsClintronicPas encore d'évaluation
- Sample Medium Maintenance PlanDocument20 pagesSample Medium Maintenance PlanRajipah OsmanPas encore d'évaluation
- Act 6+14Document4 pagesAct 6+14min95Pas encore d'évaluation
- Carbon Alloy Steel Stainless SteelDocument4 pagesCarbon Alloy Steel Stainless Steelaswar_mhPas encore d'évaluation
- Biomedical Waste Rule 2016 ReviewDocument5 pagesBiomedical Waste Rule 2016 ReviewRakesh VermaPas encore d'évaluation