Vous aimerez peut-être aussi
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsD'EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsPas encore d'évaluation
- Moving Pulse GeneratorDocument99 pagesMoving Pulse Generatorabc1000100% (1)
- Dell Laptop Bill WarranatyDocument2 pagesDell Laptop Bill Warranatyajd.nanthakumar57% (7)
- Flow Through PipesDocument9 pagesFlow Through Pipesatif irshadPas encore d'évaluation
- Pulsation Supression DeviceDocument9 pagesPulsation Supression Devicesswoo3868Pas encore d'évaluation
- CFD Ball ValveDocument8 pagesCFD Ball ValveKelvin Octavianus DjohanPas encore d'évaluation
- HiTEC 521F PDS Antiwear HydraulicDocument2 pagesHiTEC 521F PDS Antiwear HydraulicJeremias Utrera100% (1)
- Analysis of FormulasDocument21 pagesAnalysis of Formulasjesus marquez arvaezPas encore d'évaluation
- A Method To Simulate The MR Fluid in ANSYSDocument19 pagesA Method To Simulate The MR Fluid in ANSYSshreedharkolekarPas encore d'évaluation
- Design Bypass MagnetorheologicalDocument21 pagesDesign Bypass Magnetorheologicalmhafiz9922Pas encore d'évaluation
- 1 s2.0 S0045794907000739 MainDocument10 pages1 s2.0 S0045794907000739 MainManik SharmaPas encore d'évaluation
- 2 PDFDocument13 pages2 PDFubedullahPas encore d'évaluation
- MR FluidsDocument6 pagesMR FluidsjoshibecPas encore d'évaluation
- Control Strategies For Vehicle Suspension System Featuring Magnetorheological (MR) DamperDocument19 pagesControl Strategies For Vehicle Suspension System Featuring Magnetorheological (MR) DamperHemanth KrishnaPas encore d'évaluation
- Analysis of Magneto Rheological Fluid Damper With Various Piston Profiles1Document7 pagesAnalysis of Magneto Rheological Fluid Damper With Various Piston Profiles1ajd.nanthakumarPas encore d'évaluation
- Analysis of A Novel Magnetic-Hydrodynamic Double Levitated Motor For An Implantable Axial Flow Blood Pump PDFDocument15 pagesAnalysis of A Novel Magnetic-Hydrodynamic Double Levitated Motor For An Implantable Axial Flow Blood Pump PDFVu MinhPas encore d'évaluation
- Bom Pos 2014Document9 pagesBom Pos 2014nadimduet1Pas encore d'évaluation
- Vibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationDocument16 pagesVibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationElvis CarneiroPas encore d'évaluation
- Structures Journal of Intelligent Material Systems andDocument13 pagesStructures Journal of Intelligent Material Systems anddialauchennaPas encore d'évaluation
- Pressure Pulsation Characteristics of A Model Pump-Turbine Operating in The S-Shaped Region: CFD SimulationsDocument9 pagesPressure Pulsation Characteristics of A Model Pump-Turbine Operating in The S-Shaped Region: CFD SimulationsLe Thanh HaiPas encore d'évaluation
- CFD Analysis of Flow Through Compressor CascadeDocument10 pagesCFD Analysis of Flow Through Compressor CascadeKhalid KhalilPas encore d'évaluation
- Optimal Design of MR Shock Absorber and Application To Vehicle SuspensionDocument12 pagesOptimal Design of MR Shock Absorber and Application To Vehicle SuspensionDawit AssfawPas encore d'évaluation
- Numerical Simulation of Turbulent Flow Through A Francis Turbine RunnerDocument6 pagesNumerical Simulation of Turbulent Flow Through A Francis Turbine RunnerAngel CerriteñoPas encore d'évaluation
- Ijsrp p1206Document7 pagesIjsrp p1206aakrit paiPas encore d'évaluation
- Journal of EEA, Vol. 28, 2011: Keywords: Centrifugal Pump, FLUENTDocument7 pagesJournal of EEA, Vol. 28, 2011: Keywords: Centrifugal Pump, FLUENTMohammed El-ShahatPas encore d'évaluation
- Assignment 5 FaizDocument4 pagesAssignment 5 Faizhamza_almukhtarrPas encore d'évaluation
- Parametric Model of MR DamperDocument26 pagesParametric Model of MR DamperGurubasavaraju T MPas encore d'évaluation
- Super-Strong Magnetorheological Fluids: Topical ReviewDocument21 pagesSuper-Strong Magnetorheological Fluids: Topical ReviewDhanya NairPas encore d'évaluation
- Rogowski FactorDocument5 pagesRogowski FactorRiddhi GhoshPas encore d'évaluation
- Evaluation of Nonlinear Dynamic Phenomena in The HystereticBehaviour of Magnetorheological DampersDocument36 pagesEvaluation of Nonlinear Dynamic Phenomena in The HystereticBehaviour of Magnetorheological DampersGeorge LazarPas encore d'évaluation
- Leakage Inductance Determination For Transformers With Interleaving of WindingsDocument5 pagesLeakage Inductance Determination For Transformers With Interleaving of WindingsLRHENGPas encore d'évaluation
- Rahimian 2018Document22 pagesRahimian 2018nitin marathePas encore d'évaluation
- Numerical Prediction of The Vortex Rope in The Draft Tube: Dragica Jošt Andrej LipejDocument12 pagesNumerical Prediction of The Vortex Rope in The Draft Tube: Dragica Jošt Andrej LipejWilfredoJosuePas encore d'évaluation
- Ijcrr: A Study On Magnetorheological Fluid (MRF) DamperDocument8 pagesIjcrr: A Study On Magnetorheological Fluid (MRF) Damperaakrit paiPas encore d'évaluation
- Compressible Flow Through A Supersonic NDocument6 pagesCompressible Flow Through A Supersonic NABDULLAH SHAHRIAR PIYAL CHY 1803034Pas encore d'évaluation
- Mathematical Modelling and Computational Simulation of The Hydraulic Damper During The Orifice-Working Stage For RailwayvehiclesDocument24 pagesMathematical Modelling and Computational Simulation of The Hydraulic Damper During The Orifice-Working Stage For RailwayvehiclesFrancesca CoattiPas encore d'évaluation
- Hydrodynamic Analysis and Shape Optimization For Vertical Axisymmetric Wave Energy ConvertersDocument13 pagesHydrodynamic Analysis and Shape Optimization For Vertical Axisymmetric Wave Energy ConvertersMohammad NasreddinePas encore d'évaluation
- Aerospace 05 00102Document19 pagesAerospace 05 00102PatricePas encore d'évaluation
- A Single-Parameter Theory of Vortex Turbo-Machines Flow inDocument39 pagesA Single-Parameter Theory of Vortex Turbo-Machines Flow inAsmaa Alaa ElDeenPas encore d'évaluation
- Analytical Investigation On Fundamental Electrical Characteristics of Large Air-Gap Superconducting Synchronous MachineDocument8 pagesAnalytical Investigation On Fundamental Electrical Characteristics of Large Air-Gap Superconducting Synchronous MachineahmadPas encore d'évaluation
- Ying 2011 A PDFDocument6 pagesYing 2011 A PDFAngel CerriteñoPas encore d'évaluation
- PHD Thesis MarcoManfrediDocument163 pagesPHD Thesis MarcoManfredikurts010Pas encore d'évaluation
- Three-Dimensional CFD Rotordynamic Analysis of Gas Labyrinth SealsDocument7 pagesThree-Dimensional CFD Rotordynamic Analysis of Gas Labyrinth SealsTapanVaishnavPas encore d'évaluation
- Swirling Flow-Bluff Body - RANS - 24062019Document35 pagesSwirling Flow-Bluff Body - RANS - 24062019ibrahim boukhPas encore d'évaluation
- Jurnal Q1 - Wei2019Document14 pagesJurnal Q1 - Wei2019Agus LutantoPas encore d'évaluation
- Jeas 0218 6760Document7 pagesJeas 0218 6760Tarek TarekPas encore d'évaluation
- MR Damper ThesisDocument7 pagesMR Damper Thesisrqeygcugg100% (1)
- Engineering Science and Technology, An International JournalDocument9 pagesEngineering Science and Technology, An International JournalAli EmamiPas encore d'évaluation
- Parametric Design of A Francis Turbine Runner by Means of A Three-Dimensional Inverse Design MethodDocument11 pagesParametric Design of A Francis Turbine Runner by Means of A Three-Dimensional Inverse Design MethodsandeshbhavsarPas encore d'évaluation
- Ismb 7Document6 pagesIsmb 7Kadhigo YusufPas encore d'évaluation
- 1 s2.0 S003259102200523X MainDocument17 pages1 s2.0 S003259102200523X Maintejareddy1Pas encore d'évaluation
- Comparative Analysis of K-ε and Spalart-Allmaras Turbulence Models for Compressible Flow through a Convergent-Divergent NozzleDocument10 pagesComparative Analysis of K-ε and Spalart-Allmaras Turbulence Models for Compressible Flow through a Convergent-Divergent NozzleMalik NaweratPas encore d'évaluation
- The Impact of Eddy Currents in The Transformer WindingsDocument32 pagesThe Impact of Eddy Currents in The Transformer WindingsCharles Tayamen, Jr.Pas encore d'évaluation
- High Speed Vessel RuddersDocument12 pagesHigh Speed Vessel RuddersbiondavPas encore d'évaluation
- 1 Faz Khullar - 2022 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 1079 - 012027Document9 pages1 Faz Khullar - 2022 - IOP - Conf. - Ser. - Earth - Environ. - Sci. - 1079 - 012027KaanPas encore d'évaluation
- Paper ID - 80 - ICEPDocument14 pagesPaper ID - 80 - ICEParefinnshiblyyPas encore d'évaluation
- 9 Liu Haworth PSU ImpDocument6 pages9 Liu Haworth PSU ImpShoeb Ahmed SyedPas encore d'évaluation
- Articulo Sobre El Modelado de Un Sistema NeumaticoDocument27 pagesArticulo Sobre El Modelado de Un Sistema NeumaticoLuis HerreraPas encore d'évaluation
- Journal PUREAriniDocument17 pagesJournal PUREAriniFarid NugrohoPas encore d'évaluation
- Franscis Runner Finite Element AnalysisDocument13 pagesFranscis Runner Finite Element AnalysisAnonymous HtYWpEtXGzPas encore d'évaluation
- Experimental Studies On Seismic Performance of Three Storey Steel MomentDocument15 pagesExperimental Studies On Seismic Performance of Three Storey Steel MomentJuan José Gómez GarcíaPas encore d'évaluation
- Vol1no1-6 GovardhanMDocument14 pagesVol1no1-6 GovardhanMSandra PowersPas encore d'évaluation
- Analysis and Design of A Cylindrical Magneto-Rheological Fluid BrakeDocument4 pagesAnalysis and Design of A Cylindrical Magneto-Rheological Fluid BrakeJagadeeshMadugulaPas encore d'évaluation
- TataSky Payment PDFDocument1 pageTataSky Payment PDFajd.nanthakumarPas encore d'évaluation
- ReadmeDocument1 pageReadmeajd.nanthakumarPas encore d'évaluation
- Report On Intellectual Property Rights (IPR's)Document1 pageReport On Intellectual Property Rights (IPR's)ajd.nanthakumarPas encore d'évaluation
- Unit 3: Vertical Dynamics: Subject: 15ae401 - Vehicle Dynamics Faculty: Ajd NanthakumarDocument7 pagesUnit 3: Vertical Dynamics: Subject: 15ae401 - Vehicle Dynamics Faculty: Ajd Nanthakumarajd.nanthakumarPas encore d'évaluation
- Applying Bloom's Taxonomy To Learning Objectives: Action VerbsDocument2 pagesApplying Bloom's Taxonomy To Learning Objectives: Action Verbsajd.nanthakumar100% (1)
- Letter of Recommendation: Nanthakumar.d@ktr - Srmuniv.ac - in +91-7810032033Document1 pageLetter of Recommendation: Nanthakumar.d@ktr - Srmuniv.ac - in +91-7810032033ajd.nanthakumarPas encore d'évaluation
- Mechanical Systems and Signal Processing: H. Metered, P. Bonello, S.O. OyadijiDocument19 pagesMechanical Systems and Signal Processing: H. Metered, P. Bonello, S.O. Oyadijiajd.nanthakumarPas encore d'évaluation
- TNCSTDocument6 pagesTNCSTajd.nanthakumarPas encore d'évaluation
- To Tiff 300dpiDocument1 pageTo Tiff 300dpiajd.nanthakumarPas encore d'évaluation
- Nwae'19 Contents: About Our InstitutionDocument2 pagesNwae'19 Contents: About Our Institutionajd.nanthakumarPas encore d'évaluation
- Transient Properties of A Magnetorheological Damper Discussion To The PaperDocument10 pagesTransient Properties of A Magnetorheological Damper Discussion To The Paperajd.nanthakumarPas encore d'évaluation
- Erof - 84911579519Document1 pageErof - 84911579519ajd.nanthakumarPas encore d'évaluation
- PicturesDocument28 pagesPicturesajd.nanthakumarPas encore d'évaluation
- Session Plan: Date Time Topic Resource PersonDocument1 pageSession Plan: Date Time Topic Resource Personajd.nanthakumarPas encore d'évaluation
- Bouc Wen Simulink ModelDocument18 pagesBouc Wen Simulink Modelajd.nanthakumarPas encore d'évaluation
- Provided by Patentstorm, HTTP://WWW - Patentstorm.UsDocument34 pagesProvided by Patentstorm, HTTP://WWW - Patentstorm.Usajd.nanthakumarPas encore d'évaluation
- AlternativeDocument6 pagesAlternativeajd.nanthakumarPas encore d'évaluation
- Fixedline and Broadband Services: Your Account Summary This Month'S ChargesDocument6 pagesFixedline and Broadband Services: Your Account Summary This Month'S Chargesajd.nanthakumarPas encore d'évaluation
- Shock Absorber Performance Test System SP-01-01XX: Standard FeaturesDocument2 pagesShock Absorber Performance Test System SP-01-01XX: Standard Featuresajd.nanthakumarPas encore d'évaluation
- Unidades de Viscosidad PDFDocument1 pageUnidades de Viscosidad PDFAnonymous Via3SWuHPas encore d'évaluation
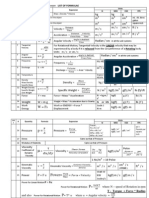
- FMM Formulae ListDocument7 pagesFMM Formulae ListRajha Rajeswaran100% (1)
- Ce 214-Fluid Mechanics Laboratory ManualDocument39 pagesCe 214-Fluid Mechanics Laboratory ManualAyush ShrivastavaPas encore d'évaluation
- Processing Induced Segregation in PLA/TPS Blends: Factors and ConsequencesDocument12 pagesProcessing Induced Segregation in PLA/TPS Blends: Factors and ConsequencesRoshni PattanayakPas encore d'évaluation
- Wilo PDFDocument469 pagesWilo PDFlogiko81Pas encore d'évaluation
- Introduction - ThermofluidDocument17 pagesIntroduction - ThermofluidAgus RiswantoPas encore d'évaluation
- College of Engineering Putrajaya Campus Final Examination Special Semester 2013 / 2014Document13 pagesCollege of Engineering Putrajaya Campus Final Examination Special Semester 2013 / 2014NabilahJasmiPas encore d'évaluation
- TRK 16.2Document23 pagesTRK 16.2adoxaPas encore d'évaluation
- Yarin - 2006 - DROP IMPACT DYNAMICS Splashing, Spreading, Receding, BouncingDocument36 pagesYarin - 2006 - DROP IMPACT DYNAMICS Splashing, Spreading, Receding, BouncingPalash Kumar FarsoiyaPas encore d'évaluation
- A Unified Numerical Model For Two-Phase Porous MusDocument67 pagesA Unified Numerical Model For Two-Phase Porous MusThe SangePas encore d'évaluation
- Paul Ceglia Effects of Reynolds Number On Coriolis Flowmeters Paper PDFDocument9 pagesPaul Ceglia Effects of Reynolds Number On Coriolis Flowmeters Paper PDFsengaigibonPas encore d'évaluation
- Lecture NotesDocument115 pagesLecture NotesMohtashim_Mans_3169Pas encore d'évaluation
- Suction Strainer Type SUS (Polyamide End Cap) : Flow CharacteristicsDocument2 pagesSuction Strainer Type SUS (Polyamide End Cap) : Flow CharacteristicsZMCONTROLPas encore d'évaluation
- Grasa Cat Advanced 3moly PDFDocument1 pageGrasa Cat Advanced 3moly PDFJorgeLuisRodriguezAguilarPas encore d'évaluation
- Technical Data Sheet: Eastman Texanol™ Ester AlcoholDocument3 pagesTechnical Data Sheet: Eastman Texanol™ Ester AlcoholNelson BarriosPas encore d'évaluation
- K-Epsilon Turbulent ModelDocument41 pagesK-Epsilon Turbulent ModelAbdul RaufPas encore d'évaluation
- Corexy 04926139Document11 pagesCorexy 04926139CicciputtPas encore d'évaluation
- Petrotac EP Premium PDS English 5.16Document2 pagesPetrotac EP Premium PDS English 5.16Rafael Patricio OrellanaPas encore d'évaluation
- 3944 1982 Reff2020Document13 pages3944 1982 Reff2020Ashish DubeyPas encore d'évaluation
- Fluent 13.0 Lecture06 Turbulence 21 22Document4 pagesFluent 13.0 Lecture06 Turbulence 21 22DrAmrit Kr RoyPas encore d'évaluation
- Choo2015 Nwe 6Document9 pagesChoo2015 Nwe 6muhammadPas encore d'évaluation
- Properties of Fluids NotesDocument14 pagesProperties of Fluids NotesMavinePas encore d'évaluation
- Hydrostatic Lubrication: Q Q R RDocument3 pagesHydrostatic Lubrication: Q Q R RNithesh NitheshbPas encore d'évaluation
- Dimensional Analysis Iseet and Neet Entrance BasedDocument17 pagesDimensional Analysis Iseet and Neet Entrance BasedAnonymous vRpzQ2BLPas encore d'évaluation
- Power Transmission System With Chain and Two Sprockets - MATLAB - MathWorks IndiaDocument5 pagesPower Transmission System With Chain and Two Sprockets - MATLAB - MathWorks IndiaViral NaikPas encore d'évaluation
- 2 FieldTestsDocument49 pages2 FieldTestsAbhishek SPas encore d'évaluation
- U-Tube Heat ExchangerDocument9 pagesU-Tube Heat Exchangerhirenpatel_62Pas encore d'évaluation
- Vinyl HandbookDocument36 pagesVinyl Handbookadib abiyyuPas encore d'évaluation