Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Blues BrosDocument14 pagesBlues Brossandrovergara100% (4)
- Oboe Technique - Evelyn Rothwell - 1953 - Oxford University Press - Anna's ArchiveDocument124 pagesOboe Technique - Evelyn Rothwell - 1953 - Oxford University Press - Anna's ArchiveBilal GuncanPas encore d'évaluation
- Madz and Dzhei Band RepertoireDocument18 pagesMadz and Dzhei Band RepertoireMadz Alcoy BautistaPas encore d'évaluation
- Massive MIMO Detection Algorithm and VLSI Architecture 2019 PDFDocument348 pagesMassive MIMO Detection Algorithm and VLSI Architecture 2019 PDFdupipiPas encore d'évaluation
- JABB ManualDocument82 pagesJABB Manualgdavis3778Pas encore d'évaluation
- Othello Qs 2012Document4 pagesOthello Qs 2012ginabobina3337238Pas encore d'évaluation
- English Literature MCQs Solved From Past PapersDocument33 pagesEnglish Literature MCQs Solved From Past PapersJohn Faustus100% (1)
- (Clarinet Institute) Gade Fantasiestucke CL PnoDocument27 pages(Clarinet Institute) Gade Fantasiestucke CL PnoRuben JacintoPas encore d'évaluation
- 2015 Modern Snare Drum CompetitionDocument4 pages2015 Modern Snare Drum CompetitionTom SherwoodPas encore d'évaluation
- John Lewis Christmas PDFDocument25 pagesJohn Lewis Christmas PDFLloyd SoansPas encore d'évaluation
- Soy Lo Que Soy - ScoreDocument14 pagesSoy Lo Que Soy - ScoreJoaco Manda Poquito Barroso100% (1)
- A Simple Autonomous Robotic Manipulator For Playing Chess Against Any Opponent in Real TimeDocument6 pagesA Simple Autonomous Robotic Manipulator For Playing Chess Against Any Opponent in Real TimeDebal SahaPas encore d'évaluation
- Your Number X 3Document1 pageYour Number X 3Debal SahaPas encore d'évaluation
- Dare Number Shuffled by DoveyDocument1 pageDare Number Shuffled by DoveyDebal SahaPas encore d'évaluation
- KhicdiDocument1 pageKhicdiDebal SahaPas encore d'évaluation
- Robocon 2010 ReportDocument46 pagesRobocon 2010 ReportDebal Saha100% (1)
- EclipsePOG 003 041215 EbookDocument128 pagesEclipsePOG 003 041215 EbookJean Baptiste CalerbePas encore d'évaluation
- Microwave Journal-December 2019 PDFDocument116 pagesMicrowave Journal-December 2019 PDFDavid BenoitPas encore d'évaluation
- Simple Present Test PDFDocument2 pagesSimple Present Test PDFkiritosamaPas encore d'évaluation
- Marti STL Brochure V1.18Document4 pagesMarti STL Brochure V1.18Agustin CervantesPas encore d'évaluation
- Everything We Have Been Afraid To Ask About Amfiteater PDFDocument10 pagesEverything We Have Been Afraid To Ask About Amfiteater PDFtomqzPas encore d'évaluation
- Trư NG THPT Đ I Cư NGDocument5 pagesTrư NG THPT Đ I Cư NGQuynh TrangPas encore d'évaluation
- The New Yorker 01 29 2024Document74 pagesThe New Yorker 01 29 2024Jelly BeanPas encore d'évaluation
- Metaverse Has Neither: Jens LarsenDocument2 pagesMetaverse Has Neither: Jens Larsenregisbone7981Pas encore d'évaluation
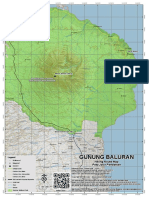
- Peta Jalur Pendakian Gunung BaluranDocument1 pagePeta Jalur Pendakian Gunung BaluranKindi SienaPas encore d'évaluation
- Saxo ConcertoDocument11 pagesSaxo ConcertoSebastian Torrejon GodoyPas encore d'évaluation
- One Tab (Ver 2) by Metallica at Ultimate-GuitarDocument11 pagesOne Tab (Ver 2) by Metallica at Ultimate-GuitarRoberto AbatematteoPas encore d'évaluation
- Instruction Book 9828093361 Ed 01 FD 100-300 VSD ENDocument66 pagesInstruction Book 9828093361 Ed 01 FD 100-300 VSD ENCorrales TitoPas encore d'évaluation
- 2017 Full Line Catalog: Ortega Musik-Meinl-Str.1 91468 Gutenstetten GermanyDocument132 pages2017 Full Line Catalog: Ortega Musik-Meinl-Str.1 91468 Gutenstetten GermanyjoaotostesPas encore d'évaluation
- Analysis of Exposition Development and RDocument9 pagesAnalysis of Exposition Development and RXavier SavellanoPas encore d'évaluation
- Atheros Ar9280Document2 pagesAtheros Ar9280Geyonk Yuli SetiawanPas encore d'évaluation
- Service Manual 969HQT PDFDocument56 pagesService Manual 969HQT PDFJose QuiscaPas encore d'évaluation
- RADWIN 5000 BrochureDocument6 pagesRADWIN 5000 BrochureErivelton SouzaPas encore d'évaluation
- Fracture From The King Crimson)Document16 pagesFracture From The King Crimson)Dave ToddPas encore d'évaluation