Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- 7 - Lakhs Bank EstimateDocument8 pages7 - Lakhs Bank Estimatevikram Bargur67% (3)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Crypto Is New CurrencyDocument1 pageCrypto Is New CurrencyCM-A-12-Aditya BhopalbadePas encore d'évaluation
- Final Year Project - Developing A Plastic Bottle Solar CollectorDocument78 pagesFinal Year Project - Developing A Plastic Bottle Solar CollectorLegendaryN0% (1)
- Ac Motors EbookDocument74 pagesAc Motors EbookHammad MalikPas encore d'évaluation
- Electrical PackageDocument260 pagesElectrical Packageazmat_86Pas encore d'évaluation
- Programmable Logic ControllerDocument214 pagesProgrammable Logic ControllerImran Aslam67% (3)
- Lessons in Electricity Volume III SemiconductorsDocument489 pagesLessons in Electricity Volume III Semiconductorsvozoscribd100% (1)
- Electrical Installations On Construction SitesDocument36 pagesElectrical Installations On Construction SitesvozoscribdPas encore d'évaluation
- Motor ClasstyDocument128 pagesMotor Classtywatep_08Pas encore d'évaluation
- Residential WiringDocument84 pagesResidential WiringJunior CruzPas encore d'évaluation
- PLC Handbook - FinaleDocument85 pagesPLC Handbook - FinalesaravanaPas encore d'évaluation
- Basics of Digital Multi MetersDocument25 pagesBasics of Digital Multi MetersHugh Geerection100% (1)
- Semiconductor DevicesDocument524 pagesSemiconductor Devicesapuinwork100% (1)
- Practical Guide To PLCsDocument60 pagesPractical Guide To PLCsvozoscribdPas encore d'évaluation
- Course in Electrical Machines and SystemsDocument85 pagesCourse in Electrical Machines and SystemsvozoscribdPas encore d'évaluation
- Complete Wiring Manual EatonDocument659 pagesComplete Wiring Manual EatonvozoscribdPas encore d'évaluation
- Parques eólicos-ABB-Vol.13Document136 pagesParques eólicos-ABB-Vol.13Afonso FreitasPas encore d'évaluation
- IEC 61850 Standard Application Examples of Substation Automation PDFDocument48 pagesIEC 61850 Standard Application Examples of Substation Automation PDFvozoscribdPas encore d'évaluation
- Guidelines To Electrical Wiring Around Your HomeDocument38 pagesGuidelines To Electrical Wiring Around Your HomevozoscribdPas encore d'évaluation
- Data Manipulation and Transfer of ControlDocument35 pagesData Manipulation and Transfer of ControlvozoscribdPas encore d'évaluation
- Electric Motors Reference GuideDocument166 pagesElectric Motors Reference GuideHemendra Jani100% (1)
- 50 555circuits PDFDocument152 pages50 555circuits PDFleonelartesano2Pas encore d'évaluation
- 200 Circuitos A Transistores PDFDocument115 pages200 Circuitos A Transistores PDFElvio Pereyra100% (1)
- AllenBradley ScadaSystemGuideDocument310 pagesAllenBradley ScadaSystemGuideNguyen Chien100% (1)
- Ei Nvq2 Ch06Document32 pagesEi Nvq2 Ch06Nihar RoyPas encore d'évaluation
- Microprocessor ArchitectureDocument26 pagesMicroprocessor ArchitecturevozoscribdPas encore d'évaluation
- 100 IC CircuitsDocument60 pages100 IC CircuitsGicu CapatinaPas encore d'évaluation
- MTS TopMill TopTurnDocument4 pagesMTS TopMill TopTurnvozoscribdPas encore d'évaluation
- 70 Interesting CircuitsDocument21 pages70 Interesting CircuitsHasitha Suneth100% (4)
- CIROS Studio Product Information enDocument14 pagesCIROS Studio Product Information envozoscribdPas encore d'évaluation
- TI Analog HandbookDocument101 pagesTI Analog HandbookJenory DenemyPas encore d'évaluation
- MTS TopMill - TopTurn PDFDocument4 pagesMTS TopMill - TopTurn PDFvozoscribdPas encore d'évaluation
- 50 Best Tools.1Document35 pages50 Best Tools.1Ian Foreman100% (20)
- Comparing environmental impacts of clay and asbestos roof tilesDocument17 pagesComparing environmental impacts of clay and asbestos roof tilesGraham LongPas encore d'évaluation
- Gilette Case - V3Document23 pagesGilette Case - V3Vidar Halvorsen100% (3)
- Critical Aspects in Simulating Cold Working Processes For Screws and BoltsDocument4 pagesCritical Aspects in Simulating Cold Working Processes For Screws and BoltsstefanomazzalaiPas encore d'évaluation
- MTD Microwave Techniques and Devices TEXTDocument551 pagesMTD Microwave Techniques and Devices TEXTARAVINDPas encore d'évaluation
- Product Models Comparison: Fortigate 1100E Fortigate 1800FDocument1 pageProduct Models Comparison: Fortigate 1100E Fortigate 1800FAbdullah AmerPas encore d'évaluation
- Payment Solutions For Travel Platform: SabreDocument2 pagesPayment Solutions For Travel Platform: Sabrehell nahPas encore d'évaluation
- Railway Reservation System Er DiagramDocument4 pagesRailway Reservation System Er DiagramPenki Sarath67% (3)
- Relationship Between Effective Pain Management and Patient RecoveryDocument4 pagesRelationship Between Effective Pain Management and Patient RecoveryAkinyiPas encore d'évaluation
- Caf 8 Aud Spring 2022Document3 pagesCaf 8 Aud Spring 2022Huma BashirPas encore d'évaluation
- Power Efficiency Diagnostics ReportDocument16 pagesPower Efficiency Diagnostics Reportranscrib300Pas encore d'évaluation
- Superelement Modeling-Based Dynamic Analysis of Vehicle Body StructuresDocument7 pagesSuperelement Modeling-Based Dynamic Analysis of Vehicle Body StructuresDavid C HouserPas encore d'évaluation
- Cis285 Unit 7Document62 pagesCis285 Unit 7kirat5690Pas encore d'évaluation
- Feedback Mechanism InstrumentDocument2 pagesFeedback Mechanism InstrumentKing RickPas encore d'évaluation
- MBA Stats Essentials: Measures, Prob, Hypothesis TestsDocument4 pagesMBA Stats Essentials: Measures, Prob, Hypothesis TestsIbrahim JawedPas encore d'évaluation
- Table of Forces For TrussDocument7 pagesTable of Forces For TrussSohail KakarPas encore d'évaluation
- Expert Java Developer with 10+ years experienceDocument3 pagesExpert Java Developer with 10+ years experienceHaythem MzoughiPas encore d'évaluation
- Supplement - 7 Procurement Manual: Democratic Socialist Republic of Sri LankaDocument8 pagesSupplement - 7 Procurement Manual: Democratic Socialist Republic of Sri LankaDinuka MalinthaPas encore d'évaluation
- Journal of Petroleum Science and Engineering: Bin Yuan, David A. WoodDocument13 pagesJournal of Petroleum Science and Engineering: Bin Yuan, David A. Woodarash7495Pas encore d'évaluation
- Python Lecture PSBCDocument83 pagesPython Lecture PSBCPedro RodriguezPas encore d'évaluation
- Mercedes B-Class Accessories ListDocument34 pagesMercedes B-Class Accessories ListmuskystoatPas encore d'évaluation
- Dani RodrikDocument12 pagesDani Rodrikprogramas4242Pas encore d'évaluation
- Summer Training Report On HCLDocument60 pagesSummer Training Report On HCLAshwani BhallaPas encore d'évaluation
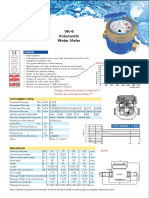
- Baylan: VK-6 Volumetric Water MeterDocument1 pageBaylan: VK-6 Volumetric Water MeterSanjeewa ChathurangaPas encore d'évaluation
- Offer Letter - Kunal Saxena (Gurgaon)Document5 pagesOffer Letter - Kunal Saxena (Gurgaon)Neelesh PandeyPas encore d'évaluation
- Eileen MarcelDocument3 pagesEileen Marcelapi-3825833Pas encore d'évaluation
- Panda CheatsheetDocument17 pagesPanda CheatsheetAdevair JuniorPas encore d'évaluation
- Manual Centrifugadora - Jouan B4i - 2Document6 pagesManual Centrifugadora - Jouan B4i - 2Rita RosadoPas encore d'évaluation