Vous aimerez peut-être aussi
- Ejercicios Vectorial Lista 1 y 2Document32 pagesEjercicios Vectorial Lista 1 y 2Obed Ramales100% (1)
- Unidad 3 Funciones VectorialesDocument26 pagesUnidad 3 Funciones VectorialesBerli Cruz83% (35)
- Selección y Cálculo de CalibresDocument13 pagesSelección y Cálculo de CalibresRIGOBERTOHD90% (41)
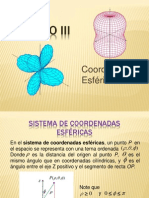
- Coordenadas Esféricas-3dDocument7 pagesCoordenadas Esféricas-3dAndrea Fernanda MqzPas encore d'évaluation
- Coordenadas Polares, Cilíndricas y EsféricasDocument24 pagesCoordenadas Polares, Cilíndricas y Esféricasflora2005_9Pas encore d'évaluation
- Derivada de Un Vector Unitario y Gral.Document9 pagesDerivada de Un Vector Unitario y Gral.kelcard10Pas encore d'évaluation
- Identidades VectorialesDocument11 pagesIdentidades VectorialesVane OñatePas encore d'évaluation
- Aplicacion de La Integral TripleDocument26 pagesAplicacion de La Integral TripleOmar Silvestre Hernandez100% (1)
- Parametrizacion CurvasDocument12 pagesParametrizacion CurvasMANUEL ARIZAPas encore d'évaluation
- Tarea 2 Ctos 2-1Document64 pagesTarea 2 Ctos 2-1panda71Pas encore d'évaluation
- Integrales Dobles Ejercicios ResueltosDocument8 pagesIntegrales Dobles Ejercicios ResueltosRick DeutschPas encore d'évaluation
- Bloque 1 ApuntesDocument26 pagesBloque 1 ApuntesDiacono10Pas encore d'évaluation
- Coordenadas PolaresDocument23 pagesCoordenadas PolaresGavi SitaPas encore d'évaluation
- Velocidad y Aceleracion. Recta TangenteDocument5 pagesVelocidad y Aceleracion. Recta TangenteAmIn20122Pas encore d'évaluation
- Ejercicios Resueltos Unidad IIIDocument16 pagesEjercicios Resueltos Unidad IIIJeremy EnderPas encore d'évaluation
- Taller No. 2 COORDENADAS CILÍNDRICAS Y ESFÉRICASDocument9 pagesTaller No. 2 COORDENADAS CILÍNDRICAS Y ESFÉRICASJUAN ANGEL GUTIERREZ CHITOPas encore d'évaluation
- Formulario de Cálculo VectorialDocument5 pagesFormulario de Cálculo VectorialRafa LitumaPas encore d'évaluation
- Aplicacion Funcion VectorialDocument37 pagesAplicacion Funcion VectorialSergio Garcia Alfaro100% (1)
- Problemas Resueltos de Matemáticas 2Document7 pagesProblemas Resueltos de Matemáticas 2CarlosFernandezPas encore d'évaluation
- Relación Entre Cuaternios y Matriz Homogénea de TransformaciónDocument5 pagesRelación Entre Cuaternios y Matriz Homogénea de TransformaciónJheremy Bazán QuispePas encore d'évaluation
- T. Integrador 2Document13 pagesT. Integrador 2Pao BelesacaPas encore d'évaluation
- Coordenadas PolaresDocument21 pagesCoordenadas PolaresEdgar AaronPas encore d'évaluation
- Calculo Coordenadas PolaresDocument7 pagesCalculo Coordenadas PolaresdanilCortezPas encore d'évaluation
- Problemas de Traslacion y Rotacion de EjesDocument27 pagesProblemas de Traslacion y Rotacion de EjesYulFuentesianoPas encore d'évaluation
- CircunferenciaDocument7 pagesCircunferenciaAlexis FloresPas encore d'évaluation
- Ejercicios Cálculo Diferencial Vectorial #3Document8 pagesEjercicios Cálculo Diferencial Vectorial #3solucionario7Pas encore d'évaluation
- Unidad Iv Sistemas de Coordenadas en El EspacioDocument15 pagesUnidad Iv Sistemas de Coordenadas en El EspacioEraldo HernandezPas encore d'évaluation
- Velocidad y Aceleracion. Recta TangenteDocument5 pagesVelocidad y Aceleracion. Recta TangenteJuan Ramón Coronel VeraPas encore d'évaluation
- Coordenadas EsféricasDocument7 pagesCoordenadas EsféricasKatherine MingaPas encore d'évaluation
- Traslaciones en El Plano CartesianoDocument8 pagesTraslaciones en El Plano CartesianoCarmen723Pas encore d'évaluation
- Geometria 2 Bachiller PDFDocument9 pagesGeometria 2 Bachiller PDFSole NietoPas encore d'évaluation
- Tema 5-Algebra Vectorial 3DDocument50 pagesTema 5-Algebra Vectorial 3DAldo OE100% (2)
- 2.5 Ecuaciones de Rectas y PlanosDocument4 pages2.5 Ecuaciones de Rectas y Planosgabito_181Pas encore d'évaluation
- FuncionesDocument64 pagesFuncionesWilliam SaaPas encore d'évaluation
- Control Fisica I PDFDocument0 pageControl Fisica I PDFElias BGPas encore d'évaluation
- Int Curv 1Document4 pagesInt Curv 1Carolina OrellanaPas encore d'évaluation
- MCVV2 U2 EaDocument6 pagesMCVV2 U2 EaMaríaLuzPérezPas encore d'évaluation
- Trabajo CalculoDocument13 pagesTrabajo CalculoKeyli Jiseth CONTRERAS ORTEGAPas encore d'évaluation
- Ejercicios Resultos RoboticaDocument12 pagesEjercicios Resultos RoboticaTeddy Jhennse Negrete Peña50% (4)
- Vectores en El Espacio Unidad 1Document80 pagesVectores en El Espacio Unidad 1mike0901brrPas encore d'évaluation
- Calculo Vectorial. Geometría Del Espacio Euclidiano.Document3 pagesCalculo Vectorial. Geometría Del Espacio Euclidiano.Paola Juliethe BurgosPas encore d'évaluation
- Tema 7 Mat 102 1-2023 G - C. CivilDocument18 pagesTema 7 Mat 102 1-2023 G - C. CivilLoopCast 123Pas encore d'évaluation
- 05-Transformaciones Geometricas PDFDocument77 pages05-Transformaciones Geometricas PDFMarco Antonio Delgado BahenaPas encore d'évaluation
- EsfericaDocument4 pagesEsfericaYULEYSIPas encore d'évaluation
- Taller de Coordenadas CartesianasDocument6 pagesTaller de Coordenadas CartesianasAnyul Andrea Tarazona RiveraPas encore d'évaluation
- Análisis Cinemático de Mecanismos TridimensionalesDocument5 pagesAnálisis Cinemático de Mecanismos TridimensionalesSergio MoysenPas encore d'évaluation
- Triedro de FrenetDocument6 pagesTriedro de FrenetPaolo Cardenas GonsalezPas encore d'évaluation
- Jhonatanespinalgarcia FR CurvasDocument10 pagesJhonatanespinalgarcia FR CurvasRay TennysonPas encore d'évaluation
- 15 Vectores y GeometríaDocument44 pages15 Vectores y GeometríaENIC-AITCG100% (1)
- Problemas Fáciles de Espacio Afín y EuclídeoDocument24 pagesProblemas Fáciles de Espacio Afín y EuclídeoroberdrumPas encore d'évaluation
- Coordenadas PolaresDocument13 pagesCoordenadas PolaresantherescPas encore d'évaluation
- Curvas en R2 y Ecuaciones ParamétricasDocument21 pagesCurvas en R2 y Ecuaciones ParamétricasAby Valenzuela100% (1)
- Ejercicios Por Tema U2 - GMM - AjlpDocument15 pagesEjercicios Por Tema U2 - GMM - AjlpJoshue PerezPas encore d'évaluation
- Guia 1Document12 pagesGuia 1Jorge SanchezPas encore d'évaluation
- Cambio de VariablesDocument54 pagesCambio de VariablesRicardo Monge RogelPas encore d'évaluation
- Circuitos HidraulicosDocument13 pagesCircuitos Hidraulicoskelcard10Pas encore d'évaluation
- Bibliografia Tarea1Document1 pageBibliografia Tarea1kelcard10Pas encore d'évaluation
- Minimos CuadradosDocument3 pagesMinimos Cuadradoskelcard10Pas encore d'évaluation
- DATOSDocument23 pagesDATOSkelcard10Pas encore d'évaluation
- Practica PDM IDocument6 pagesPractica PDM Ikelcard10Pas encore d'évaluation
- Graficas MotoresDocument3 pagesGraficas Motoreskelcard10Pas encore d'évaluation
- Auto JettaDocument1 pageAuto Jettakelcard10Pas encore d'évaluation
- DPF Cemento2Document1 pageDPF Cemento2kelcard10Pas encore d'évaluation
- Conceptos DinamicaDocument2 pagesConceptos Dinamicakelcard10Pas encore d'évaluation
- DPO Esparrago 5Document1 pageDPO Esparrago 5kelcard10Pas encore d'évaluation
- DPO Esparrago 3Document1 pageDPO Esparrago 3kelcard10Pas encore d'évaluation
- Selección de Calibre en Cables para Construcción PDFDocument7 pagesSelección de Calibre en Cables para Construcción PDFFrancisco GalleguillosPas encore d'évaluation
- Dpo 00Document1 pageDpo 00kelcard10Pas encore d'évaluation
- DPO Esparrago 1Document1 pageDPO Esparrago 1kelcard10Pas encore d'évaluation
- Mecanismos 1Document6 pagesMecanismos 1kelcard10Pas encore d'évaluation
- Clase Jueves12 Tarea4Document1 pageClase Jueves12 Tarea4kelcard10Pas encore d'évaluation
- Qué Es El Its PLC Professional EditionDocument2 pagesQué Es El Its PLC Professional Editionkelcard10Pas encore d'évaluation
- Tarea 1 Procesos 2Document6 pagesTarea 1 Procesos 2kelcard10Pas encore d'évaluation
- Doble Semaforo ReiniciadoDocument1 pageDoble Semaforo Reiniciadokelcard10Pas encore d'évaluation
- Practica IV PDM IDocument6 pagesPractica IV PDM Ikelcard10Pas encore d'évaluation
- Practica II PDM IDocument6 pagesPractica II PDM Ikelcard10Pas encore d'évaluation
- Pie de MetroDocument6 pagesPie de MetroWalan K'tarrinPas encore d'évaluation
- Escalamiento de Un Sensor 21 MayoDocument3 pagesEscalamiento de Un Sensor 21 Mayokelcard10Pas encore d'évaluation
- ForjaDocument15 pagesForjakelcard10Pas encore d'évaluation
- Tablas CompletasDocument7 pagesTablas CompletasartidroortePas encore d'évaluation
- Trabajo Energiap2013P1Document21 pagesTrabajo Energiap2013P1kelcard10Pas encore d'évaluation
- Desp-Vel-Acael Linea Recta (Modo de Compatibilidad)Document29 pagesDesp-Vel-Acael Linea Recta (Modo de Compatibilidad)kelcard10Pas encore d'évaluation
- DerivvecunitDocument1 pageDerivvecunitkelcard10Pas encore d'évaluation