Académique Documents
Professionnel Documents
Culture Documents
Field Rectificacion
Transféré par
Maribel RojasCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Field Rectificacion
Transféré par
Maribel RojasDroits d'auteur :
Formats disponibles
ERDAS Field Cuide
343
CAPITULO 9
Rectificacin
Introduccin
Los datos crudos de imgenes de sensores de remotos, obtenidos mediante satlites o
aviones, son representaciones de la superficie irregular de la tierra. Incluso las imgenes
de zonas de topografa plana tienen distorsiones debido a la curvatura de la tierra y al
sensor utilizado. Este captulo cubre los procesos de correccin geomtrica de una
imagen de manera que se pueda representar en una superficie plana, integrarse a otras
imgenes y tener la integridad de un mapa.
Un sistema de proyeccin cartogrfica es cualquier sistema diseado para representar la
superficie de una esfera o de un esferoide (tal como la Tierra) sobre un plano. Existen
diversos mtodos de proyeccin cartogrfica. Como el aplanamiento de una esfera
sobre un plano causa distorsiones a la superficie, cada sistema de proyeccin cartogrfica
compromete la exactitud entre ciertas propiedades, tales como la conservacin de la
distancia, el ngulo o el rea. Por ejemplo, en proyecciones cartogrficas de igual rea, un
crculo de un determinado dimetro dibujado en cualquier parte del mapa representa la
misma rea total. Esto es til para comparar reas de uso de la tierra, densidad y muchas
otras aplicaciones. Sin embargo, para mantener las reas iguales, las formas, los ngulos
y las escala pueden tener distorsin en algunas partes del mapa (Jensen 1996).
Existen varios sistemas de coordenadas cartogrficas para determinar la localizacin de
una imagen. Estos sistemas de coordenadas se ajustan a una cuadrcula y son
expresados como pares de nmeros X, Y (columna, fila). Cada sistema de proyeccin
cartogrfica est asociado con un sistema de coordenadas cartogrficas.
La rectificacin es el proceso de transformar los datos de un sistema de cuadrcula en otro
sistema de cuadrcula usando una transformacin geomtrica. Aunque las
transformaciones polinmicas y los mtodos basados en triangulacin se describen en
este captulo, una discusin detallada sobre las diversas tcnicas de rectificacin se
puede encontrar en Yang (1997). Como los pixeles de la nueva cuadrcula pueden no
estar alineados con los pixeles de la grilla original, los pixeles deben ser remuestreados.
El remuestreo es el proceso de extrapolar niveles digitales para los pixeles de la nueva
grilla a partir de los valores de los pixeles originales.
Registro
En muchos casos, se deben usar juntas las imgenes de un rea que se han adquirido a
partir de diferentes fuentes. Para poder comparar imgenes separadas, pixel por pixel, las
cuadrculas de los pixeles de cada imagen deben estar ajustadas con las de las otras
imgenes de la base de datos. Las herramientas para rectificar datos de imgenes se
usan para transformar imgenes dispares a un mismo sistema de coordenadas. El registro
es el proceso de hacer una imagen conforme a otra imagen. Un sistema de coordenadas
cartogrficas no est necesariamente involucrado. Por ejemplo, si la imagen A no est
rectificada y se va a usar con la imagen B, entonces la imagen B debe registrarse a la
imagen A de manera que sean conformes una con otra. En este ejemplo, la imagen A no
est rectificada en una proyeccin cartogrfica particular, de manera tal que no hay
necesidad de rectificar la imagen B a una proyeccin cartogrfica.
ERDAS Field Cuide
344
Georeferenciacin
La georeferenciacin se refiere al proceso de asignar coordenadas cartogrficas a los
datos de una imagen. Los datos pueden estar ya proyectados en el plano deseado, pero
no estar referenciados en el sistema de coordenadas apropiado. La rectificacin, por
definicin, involucra la georeferenciacin ya que todos los sistemas de proyeccin
cartogrfica estn asociados con coordenadas cartogrficas. El registro imagen-a-imagen
involucra georeferenciacin nicamente si la imagen de referencia ya est
georeferenciada. La georeferenciacin, por s misma, involucra nicamente el cambio de
la informacin de coordenadas cartogrficas en el archivo de la imagen. La cuadrcula
(grilla) de la imagen no cambia.
Los datos geocodificados son imgenes que se han rectificado en una proyeccin
cartogrfica y en un tamao de pixel particular y que usualmente tienen correcciones
radiomtricas aplicadas. Es posible comprar datos de imgenes que ya estn
geocodificados. Los datos geocodificados deberan ser rectificados nicamente si ellos
deben estar conforme a un sistema de proyeccin diferente o deben ser registrados a
otros datos rectificados.
Latitud/Longitud
Lat/Lon es un sistema de coordenadas esfricas que no est asociado con una
proyeccin cartogrfica. Lat/Lon expresa las posiciones en trminos de un esferoide, no
de un plano. As que, una imagen no est usualmente rectificada en Lat/Lon, aunque es
posible convertir imgenes a Lat/Lon, y en este captulo se incluyen algunas sugerencias
para hacerlo.
Usted puede ver la informacin de proyeccin cartogrfica para un archivo particular usando la
utilidad Image Information. Image Information le permite a usted modificar la informacin
cartogrfica que est incorrecta. Sin embargo, usted no puede rectificar datos usando Image
Information. Usted debe usar las herramientas Rectification descritas en este captulo..
Las propiedades de las proyecciones cartogrficas y las de los sistemas particulares de
proyeccin cartogrfica se discuten en "CAPITULO 12: Cartografa" y "Apndice B: Proyecciones
Cartogrficas"
Ortorectificacin
Ortorectificacin es una forma de rectificacin que corrige el desplazamiento debido al
terreno y que se puede usar si existe un DEM del rea de estudio. Est basada en las
ecuaciones de colinealidad, que se pueden derivar usando GCPs (puntos de control
terrestre) en 3D. En reas relativamente planas, la ortorectificacin no es necesaria, pero
en reas montaosas (o en fotografas areas de edificios), en las cuales se requiere un
alto grado de exactitud, se recomienda la ortorectificacin.
Vea "CAPITULO 7: Conceptos Fotogramtricos" para ms informacin sobre
ortorectificacin.
Cundo Rectificar
La rectificacin es necesaria en los casos en los cuales la cuadrcula de pixeles de la
imagen se debe cambiar para ajustarse a un sistema de proyeccin cartogrfica o a una
imagen de referencia. Existen varias razones para rectificar datos de imgenes:
Comparacin de pixeles de escena a escena en algunas aplicaciones, tales como
deteccin del cambio o cartografa de inercia termal (comparacin da y noche)
Desarrollo de bases de datos SIG para modelamiento
ERDAS Field Cuide
345
Identificacin de muestras de entrenamiento de acuerdo con las coordenadas
cartogrficas antes de realizar la clasificacin
Creacin de fotomapas exactos, a escala
Superposicin de imgenes con datos vectoriales, tales como ArcInfo
Comparacin de imgenes que estn originalmente en escalas diferentes
Extraccin de medidas exactas de reas y distancias
Mosaicos de imgenes
Realizacin de otros anlisis que requieren posiciones geogrficas precisas
Antes de rectificar los datos, usted debe determinar el sistema de coordenadas apropiado
para la base de datos. Para seleccionar el sistema de coordenadas y la proyeccin
cartogrfica adecuadas, se debe considerar el uso primario de los datos:
Si usted est realizando un proyecto gubernamental, la proyeccin puede estar
predeterminada. Una proyeccin muy usada por el gobierno de Estados Unidos es State
Plane. Use una proyeccin de igual rea para mapas temticos o de distribucin y una
proyeccin conforme o de igual rea para mapas de presentacin. Antes de seleccionar
una proyeccin cartogrfica, considere lo siguiente:
Qu tan grande o pequea es el rea mapeada? Existen diferentes proyecciones
para diferentes tamaos de rea.
En qu lugar del globo est el rea de estudio? Las regiones polares y las
regiones ecuatoriales requieren diferentes proyecciones para mayor exactitud.
Cul es la extensin del rea de estudio? Las reas circulares, norte-sur, este-
oeste y las reas oblicuas pueden requerir diferentes sistemas de proyeccin
(ESRI 1992).
Cundo Georeferenciar nicamente
La rectificacin no es necesaria si no existe distorsin en la imagen. Por ejemplo, si un
archivo de imagen se obtiene mediante escaneo o digitalizacin de un mapa en papel
que est en el sistema de proyeccin deseado, entonces la imagen ya es plana y no
requiere rectificacin a menos que exista inclinacin o rotacin de la imagen. El escaneo
y la digitalizacin producen imgenes que son planas pero que no contienen ninguna
informacin de coordenadas cartogrficas. Estas imgenes requieren nicamente ser
georeferenciadas, lo cual es un proceso mucho ms simple que la rectificacin. En
muchos casos, el encabezado de la imagen puede simplemente ser actualizado con una
informacin de coordenadas cartogrficas. Esto involucra redefinir:
La coordenada cartogrfica de la esquina superior izquierda de la imagen
El tamao de la celda (el rea representada por cada pixel)
Esta informacin es usualmente la misma para cada capa (banda) de un archivo de
imagen, aunque podra ser diferente. Por ejemplo, el tamao de celda de la banda 6 de
datos Landsat TM es diferente que el tamao de la celda de las otras bandas.
Use la utilidad Image Information para modificar el encabezado del archivo de la
imagen que est incorrecto.
ERDAS Field Cuide
346
Desventajas de la Rectificacin
Durante la rectificacin, los niveles digitales de los pixeles rectificados deben ser
remuestreados para ajustarlos a la nueva cuadrcula de filas y columnas de pixeles.
Aunque algunos de los algoritmos para el clculo de esos valores son altamente
confiables, se puede perder integridad espectral de los datos durante la rectificacin. Si
las coordenadas cartogrficas o las unidades cartogrficas no son necesarias en la
aplicacin, entonces es aconsejable no rectificar la imagen. Una imagen no rectificada es
espectralmente ms correcta que una imagen rectificada.
Clasificacin
Algunos analistas recomiendan realizar la clasificacin antes de la rectificacin, ya que la
clasificacin se puede basar en los niveles digitales originales. Otro beneficio es que un
archivo temtico tiene nicamente una banda para rectificar en lugar de las mltiples
bandas de un archivo continuo. De otro lado, puede ser benfico rectificar los datos
primero, especialmente cuando se usan datos GPS para los GCPs. Debido a que estos
datos son muy exactos, la clasificacin puede ser ms exacta si las nuevas coordenadas
ayudan a la localizacin de mejores muestras de entrenamiento.
Archivos Temticos
El mtodo de remuestreo del vecino ms cercano es el nico apropiado para archivos
temticos, lo cual puede ser una desventaja en algunas aplicaciones. Los mtodos de
remuestreo disponibles se discuten posteriormente en este captulo.
Pasos para la Rectificacin
NOTA: El registro y la rectificacin involucran conjuntos de procedimientos similares. A travs de
esta documentacin, muchas referencias para la rectificacin tambin aplican al registro imagen-a-
imagen.
Usualmente, la rectificacin es la conversin de las coordenadas de archivo de los datos a
otra cuadrcula y sistema de coordenadas, llamada un sistema de referencia. La
rectificacin o el registro de los datos de una imagen en un disco involucra los siguientes
pasos generales, independientemente de la aplicacin:
1. Ubique GCPs.
2. Calcule y pruebe una transformacin.
3. Cree un archivo de imagen de salida con la nueva informacin de corodenadas en el
encabezado. Los pixeles deben ser remuestreados para ajustarse a la nueva cuadrcula.
Las imgenes pueden ser rectificadas en el despliegue (en un visor o viewer) o sobre el
disco. La rectificacin en el despliegue es temporal pero la rectificacin en el disco es
permanente, porque se crea un nuevo archivo. La rectificacin sobre el disco involucra:
Reacomocodar los pixeles de la imagen a una nueva cuadrcula que se ajuste a un
plano en la proyeccin cartogrfica y en el sistema de coordenadas nuevos.
Insertar nueva informacin en el encabezado del archivo, tal como las coordenadas de
la esquina superior izquierda y el rea representada por cada pixel.
Puntos de Control Terrestre
Los GCPs son pixeles especficos de una imagen para los cuales se conocen las
coordenadas cartogrficas de salida (u otras coordenadas de salida). Los GCPs consisten
de dos pares X,Y de coordenadas:
Coordenadas fuenteusualmente coordenadas de archivo de los datos de la
imagen que se va a rectificar.
Coordenadas de referencia las coordenadas del mapa o de la imagen de
referencia a la cual la imagen fuente se va a registrar
ERDAS Field Cuide
347
El trmino coordenadas cartogrficas se usa algunas veces para referirse a coordenadas
de referencia y a coordenadas rectificadas. Estas coordenadas no estn limitadas a
coordenadas cartogrficas. Por ejemplo, en registro imagen a imagen, las coordenadas
cartogrficas no son necesarias.
GCPs en ERDAS IMAGINE
Cualquier imagen ERDAS IMAGINE puede tener un GCP asociado con ella. El conjunto
de GCP es almacenado en el archivo de la imagen junto con las capas raster. Si un
conjunto GCP existe para el archivo superior que est desplegado en el Viewer, entonces
esos GCPs pueden ser desplegados cuando la herramienta GCP Tool es abierta.
En la matriz de datos GCP que se despliega en la herramienta GCP Tool, una columna
muestra el identificador (ID) de cada GCP. El ID de cada punto es un nombre dado a los
GCPs en archivos separados que representan la misma posicin geogrfica. Estos GCPs
son llamados GCPs correspondientes.
Una cadena de texto default para el ID de cada punto es proporcionada (tal como GCP
#1), pero usted puede entrar su propio identificador (ID) nico para especificar los GCPs
correspondientes cuando sea necesario. An cuando nicamente un conjunto de GCPs
est asociado con un archivo de imagen, un conjunto GCP puede incluir GCPs para un
nmero dado de rectificaciones, cambiando los IDs de cada punto para grupos diferentes
de GCPs correspondientes.
Entrada de GCPs
Tener GCPs exactos es esencial para una rectificacin exacta. A partir de los GCPs, se
extrapolan las coordenadas rectificadas de todos los dems puntos de la imagen.
Seleccione muchos GCPs en toda la escena. Entre ms separados estn los GCPs, ms
confiable es la rectificacin. Los GCPs para imgenes en escala grande pueden incluir la
interseccin de dos vas, las pistas de aterrizaje, los corredores de servicios pblicos,
torres o edificios. Para imgenes en escala pequea, se pueden usar elementos grandes
tales como reas urbanas o rasgos geolgicos. Elementos variables (por ejemplo, los
lmites de lagos u otros cuerpos de agua, vegetacin, etc) no deberan usarse.
Las coordenadas fuente y de referencia de los GCPs pueden entrarse de las siguientes
maneras:
Ellas pueden ser conocidas a priori, y entradas desde el teclado.
Use el mouse para seleccionar un pixel de una imagen en el Viewer. Con los dos viewers
abiertos, el origen y el destino, entre las coordenadas fuente y las coordenadas de
referencia para el registro imagen a imagen.
Use una tableta digitalizadora para registrar una imagen a un mapa en copia dura.
La informacin sobre el uso y la configuracin de una tableta digitalizadora es
discutida en "CAPITULO 2: Capas Vectoriales"
Opcin Tableta Digitalizadora
Si los GCPs son digitalizados de un mapa en papel usando una tableta digitalizadora, se
deben tener mapas bsicos de buena exactitud. Usted debera tratar de ajustar la
resolucin de la imagen con la escala y proyeccin del mapa fuente. Por ejemplo, los
cuadrngulos a escala 1:24,000 de USGS son buenos mapas bsicos para rectificar
imgenes Landsat TM y SPOT. Evite usar mapas de escala menor que 1:250,000 si es
posible. Los mapas gruesos (por ejemplo, 1:250,000) son tiles para imgenes de
resolucin muy baja (por ej, AVHRR) y los mapas bsicos finos (por ejemplo, 1:24,000)
son tiles para imgenes de resolucin espacial fina (por ejemplo, Landsat y SPOT).
ERDAS Field Cuide
348
Opcin Mouse
Cuando se entran GCPs con el mouse, usted debera tratar de ajustar la imagen de
resolucin gruesa a la imagen de resolucin fina (ejemplo, Landsat TM a SPOT) y evitar
ampliar la resolucin ms all del radio de convolucin cbica (un rea de 4x4). En otras
palabras, usted no debera tratar de ajustar Landsat MSS o Landsat TM a una fotografa
area.
Cmo se almacenan los GCPs
Los GCPs entrados con el mouse son almacenados en el archivo de la imagen y aquellos
entrados con el teclado o usando una tableta digitalizadora son almacenados en un
archivo separado con la extensin .gcc.
Prediccin y Ajuste de GCP
La prediccin automtica de GCP permite al usuario picar un GCP en cualquier sistema
de coordenadas y automticamente localizar ese punto en otro sistema de coordenadas
basado en los parmetros de transformacin actuales.
El ajuste automtico de GCP es un paso adelante de la prediccin GCP. Para una
rectificacin imagen a imagen, un GCP seleccionado en una imagen es ajustado de
manera precisa a su contraparte en la otra imagen usando las caractersticas espectrales
de los datos y la transformacin geomtrica. El ajuste GCP permite al usuario afinar una
rectificacin para obtener resultados exactos.
Los dos mtodos requieren una transformacin existente que consiste de un conjunto de
coeficientes usados para convertir de un sistema al otro.
Prediccin GCP
La prediccin GCP es una tcnica til para ayudar a determinar si se han recolectado
suficientes GCPs. Despus de seleccionar algunos GCPs, seleccione un punto en la
imagen fuente o en la imagen destino, luego use prediccin GCP para localizar el GCP
correspondiente en la otra imagen (mapa). Este punto es determinado basado en la
transformacin actual derivada de los GCPs existentes. Examine el punto generado
automticamente y vea que tan exacto es. Si est dentro de un nivel aceptable de
exactitud, entonces existen suficientes GCPs para realizar una rectificacin exacta
(dependiendo de la separacin entre los GCPs). Si el punto generado automticamente
no es exacto, entonces se deben utilizar ms GCPs antes de rectificar la imagen.
La prediccin GCP tambin puede ser usada cuando se aplica una transformacin
existente a otra imagen en un conjunto de datos. Esto ahorra tiempo en la seleccin
manual de otro conjunto de GCPs. Luego que los GCPs se han seleccionado
automticamente, aquellos que no cumplen un nivel aceptable de error pueden ser
editados.
Ajuste GCP
En el ajuste de GCP, usted puede seleccionar cules capas de la imgenes de fuente y
de destino se usan. Como el proceso de ajuste se basa en los valores de reflectancia, se
deben seleccionar capas que tengan longitudes de onda similares, tales como dos bandas
visibles o dos bandas infrarojas. Usted puede ejecutar ajuste de histogramas para
asegurar que no hay desplazamientos entre las imgenes. Usted tambin puede
seleccionar el radio a partir del GCP que se ha pronosticado desde donde la operacin de
ajuste busca los pixeles espectralmente similares. La ventana de bsqueda puede ser
cualquier valor impar entre 5 x 5 y 21 x 21.
ERDAS Field Cuide
349
El ajuste de histogramas se discute en "CAPITULO 5: Realces".
Un umbral de correlacin se usa para aceptar o descartar puntos. La correlacin vara
entre -1.000 y +1.000. El umbral es un valor absoluto que vara entre 0.000 y 1.000. Un
valor de 0.000 indica un ajuste malo y un valor de 1.000 indica un ajuste exacto. Se
recomiendan valores superiores a 0.8000 o 0.9000. Si un ajuste no se puede hacer
porque el valor absoluto de la correlacin es menor que el umbral, usted tiene la opcin
de descartar puntos.
Transformacin Polinmica
Las ecuaciones polinmicas son usadas para convertir coordenadas coordenadas de
archivos fuente en coordenadas rectificadas (de mapa). Dependiendo de la distorsin de
la imagen, el nmero de GCPs usados y su localizacin relativa a los dems puntos, se
pueden requerir polinomios complejos para expresar la transformacin necesaria. El grado
de complejidad del polinomio es expresado como el orden del polinomio. El orden es
simplemente el exponente ms alto usado en el polinomio.
El orden de la transformacin es el orden del polinomio usado en la transformacin.
ERDAS IMAGINE permite transformaciones de 1er orden hasta n orden. Usualmente se
usan transformaciones de primer y de segundo orden.
Usted puede especificar el orden de la transformacin que desea usar en Transform Editor.
Una discusin de polinomios y ordenes se incluye en "Apndice A: Temas Matemticos".
Matriz de Transformacin
Una matriz de transformacin es calculada a partir de los GCPs. La matriz consiste de
coeficientes que son usados en ecuaciones polinmicas para convertir las coordenadas.
El tamao de la matriz depende del orden de la transformacin. La meta en el clculo de
los coeficientes de la matriz es derivar las ecuaciones polinmicas para las cuales existe
la menor cantidad de error cuando ellas se usan para transformar las coordenadas de
referencia de los GCPs en coordenadas fuente. No siempre es posible derivar coeficientes
que no produzcan errores. Por ejemplo, en la Figura 9-1, los GCPs se han dibujado y
comparado con la curva que est expresada por un polinomio.
ERDAS Field Cuide
350
Figura 9-1 Curva Polinomial vs. GCPs
Cada GCP influencia los coeficientes, an si no existe un ajuste perfecto de cada GCP
con el polinomio que representan los coeficientes. La distancia entre la coordenada de
referencia y la curva se conoce como error RMS, que se discute ms adelante en este
captulo. El mtodo de regresin por mnimos cuadrados es utilizado para calcular la
matriz de transformacin a partir de los GCPs. Este mtodo es muy comn y se discute en
textos de estadstica.
Transformaciones Lineales
Una transformacin de 1er orden es una transformacin lineal. Ella puede cambiar:
Posicin en X y/o Y
escala en X y/o Y
inclinacin en X y/o Y
rotacin
Las transformaciones de primer orden se pueden usar para proyectar imgenes crudas
en una proyeccin cartogrfica, convertir una proyeccin cartogrfica a otra proyeccin
cartogrfica y en la rectificacin de imgenes de reas relativamente pequeas. Usted
puede ejecutar transformaciones lineales simples a una imagen desplegada en un visor o
a la matriz de transformacin en s misma. Las transformaciones lineales pueden ser
requeridas antes de recolectar GCPs en la imagen desplegada. Usted puede reorientar
datos Landsat TM inclinados, rotar mapas topogrficos escaneados de acuerdo con el
ngulo de declinacin indicado en la leyenda y rotar datos descendientes de manera tal
que el norte quede hacia arriba.
Una transformacin de 1er orden tambin se puede usar para datos que ya estn
proyectados en un plano, pero que no se han rectificado a la proyeccin cartogrfica
deseada. Cuando se realiza este tipo de rectificacin, no es recomendable incrementar el
orden de la transformacin si ocurre un error RMS grande al principio. Examine otros
factores primero, tales como la fuente y distribucin de GCPs y busque errores
sistemticos.
ERDAS IMAGINE proporciona las siguientes opciones para transformaciones de 1er
orden:
escala
traslacin
rotacin
reflexin
ERDAS Field Cuide
351
Escala
Escala es igual a la option zoom en el visor, excepto que usted puede especificar
diferentes factores de escala para X y para Y.
Si usted est escalando una imagen en el visor, la opcin zoom deshace los cambios de
escala que usted haya hecho y viceversa.
Traslacin
Traslacin mueve la imagen un nmero de pixeles que haya especificado el usuario en las
direcciones X y Y.
Rotacin
Para rotacin, usted puede especificar cualquier nmero positivo o negativo de grados de
rotacin en sentido horario u antihorario. La rotacin ocurre alrededor del pixel central de
la imagen.
Reflexin
Las opciones de reflexin permiten realizar las siguientes operaciones:
reflexin de izquierda a derecha
reflexin de arriba hacia abajo
reflexin de derecha y arriba hacia abajo (igual a rotacin de 180)
Los ajustes lineales estn disponibles desde el Viewer o desde Transform Editor. Usted puede
realizar transformaciones lineales en el Viewer y luego cargar esa transformacin a Transform
Editor, o usted puede realizar las transformaciones lineales directamente en la matriz de
transformacin.
La Figura 9-2 ilustra cmo cambian los datos en transformaciones lineales.
Figura 9-2 Transformaciones Lineales
ERDAS Field Cuide
352
La matriz de transformacin para una transformacin de 1er orden consiste de seis
coeficientes tres para cada coordenada (X y Y).
Los coeficientes se usan en un polinomio de 1er orden como se indica enseguida:
Donde:
x e y son coordenadas fuente (entrada)
xo e yo son coordenadas rectificadas (salida)
los coeficientes de la matriz de transformacin son los indicados arriba.
La posicin de los coeficientes en la matriz y la asignacin de los coeficientes en el
polinomio son una convencin ERDAS IMAGINE. Otras representaciones de una
matriz de transformacin de 1er orden pueden tomar una forma diferente.
Transformaciones No Lineales
Las transformaciones de segundo o mayor orden son transformaciones no lineales. Estas
transformaciones pueden corregir distorsiones no lineales. El proceso de corregir
distorsiones no lineales tambin se conoce rubber sheeting. La Figura 9-3 ilustra los
efectos de algunas transformaciones no lineales.
Figura 9-3 Transformaciones No lineales
ERDAS Field Cuide
353
Las transformaciones de segundo orden tambin pueden usarse para convertir datos
Lat/Lon a una proyeccin plana, para datos que cubran un rea grande (para tener en
cuenta la curvatura de la Tierra) y con datos distorsionados (por ejemplo, debido a la
distorsin del lente de la cmara). Las transformaciones de tercer orden se usan con
fotografas areas distorsionadas, en escaneos de mapas deformados y con imgenes de
radar. Las transformaciones de cuarto orden pueden usarse en fotografas areas muy
distorsionadas.
La matriz de transformacin para una transformacin de orden t contiene este nmero de
coeficientes:
Se multiplica por dos para considerar los dos conjuntos de coeficientes un conjunto para
X, uno para Y.
Una manera ms fcil de llegar al mismo nmero es:
Claramente, el tamao de la matriz de transformacin se incrementa con el orden de la
transformacin.
Polinomios de Mayor Orden
Las ecuaciones polinmicas para una transformacin de orden t tienen la siguiente forma:
ERDAS Field Cuide
354
Donde:
t es el orden del polinomio
a
k
y b
k
son coeficientes
el subndice k en a
k
y b
k
est determinado por:
Un ejemplo de ecuaciones de transformacin de 3er orden para X y Y, usando nmeros,
es:
Estas ecuaciones usan un total de 20 coeficientes, o
Efectos de Orden
El clculo y la salida de una ecuacin polinmica de alto orden son ms complejos que los
de una ecuacin de bajo orden. Por consiguiente, los polinomios de segundo orden se
usan para realizar rectificaciones de imgenes ms complejas. Para entender los efectos
de diferentes rdenes de transformacin de la rectificacin de imgenes, es til ver la
salida de diferentes rdenes de polinomios.
El siguiente ejemplo usa nicamente una coordenada (X), en lugar de dos (X,Y), como se
usa en los polinomios de rectificacin. Esto permite que usted dibuje grficos
bidimensionales que ilustran la manera en la que los rdenes altos de transformacin
afectan la imagen de salida.
NOTA: Como nicamente se usa la coordenada X en estos ejemplos, el nmero de GCPs
usado es menor que el nmero requerido para realizar realmente los diferentes rdenes
de transformacin.
ERDAS Field Cuide
355
Los coeficientes como los presentados en este ejemplo- deberan ser calculados
generalmente por el mtodo de regresin de mnimos cuadrados. Suponga que los GCPs
se ingresan con estas coordenadas X:
Estos GCPs permiten una transformacin de 1er orden para las coordenadas X, la cual es
satisfecha por la ecuacin (los coeficientes estn entre parntesis):
Donde:
x
r
= la coordenada X de referencia
x
i
= la coordenada X fuente
Esta ecuacin tiene la misma forma que la ecuacin de una lnea (y = mx + b). En
trminos matemticos, un polinomio de 1er orden es lineal. Por consiguiente, una
transformacin de 1er orden tambin se conoce como transformacin lineal. Esta
ecuacin se grafica en la Figura 9-4.
Figura 9-4 Ejemplo de Transformacin 1er-Orden
ERDAS Field Cuide
356
Sin embargo, qu pasa si el segundo GCP fuera cambiado como sigue?
Estos puntos son graficados nuevamente en la Figura 9-5.
Figura 9-5 Ejemplo de Transformacin Segundo GCP cambiado
Una lnea no puede conectar estos puntos, lo cual ilustra que ellos no pueden ser
expresados por un polinomio de 1er orden, como el de arriba. En este caso, una ecuacin
polinmica de segundo orden expresa estos puntos:
Los polinomios de segundo orden o de mayor orden no son lineales. El grfico de esta
curva es dibujado en la Figura 9-6.
ERDAS Field Cuide
357
Figura 9-6 Ejemplo de Transformacin de segundo orden
Qu pasa si un GCP adicional fuera agregado a la lista?
Figure 9-7 Ejemplo de Transformacin Cuarto GCP Aadido
Como se ilustra en la Figura 9-7, este cuarto GCP no ajusta en la curva de la ecuacin
polinmica de segundo orden. Parfa asegurar que todos los GCPs ajustan, el orden de la
transformacin debera ser incrementado a tercer orden. La ecuacin y el grfico de la
Figura 9-8 seran entonces los resultados.
ERDAS Field Cuide
358
Figura 9-8 Ejemplo de Transformacin Tercer Order
La Figura 9-8 ilustra una transformacin de tercer orden. Sin embargo, esta ecuacin
puede ser innecesariamente compleja. La ejecucin de una transformacin de
coordenadas con esta ecuacin puede causar distorsiones no deseadas en la imagen de
salida por pretender un ajuste perfecto para todos los GCPs. En este ejemplo, una
transformacin de tercer orden probablemente sera demasiado alta, porque los pixeles de
salida seran organizados en un orden diferente que los pixeles de entrada, en la direccin
X.
Figura 9-9 Ejemplo de TransformacinEfecto de una transformacin de tercer orden
ERDAS Field Cuide
359
En este caso, un mayor orden de transformacin probablemente no producir los
resultados deseados.
Nmero mnimo de GCPs
Los rdenes altos de transformacin pueden ser usados para corregir tipos de distorsin
ms complicados. Sin embargo, para usar un orden alto de transformacin se requieren
ms GCPs. Por consiguiente, para realizar una transformacin de primer orden, que est
expresada por la ecuacin de un plano, se requieren por lo menos 3 GCPs. De manera
similar, la ecuacin usada en una transformacin de segundo orden es la ecuacin de un
paraboloide. Se requieren seis puntos para para definir un paraboloide. Por consiguiente,
se requiere un mnimo de seis GCPs para realizar una transformacin de segundo orden.
El nmero mnimo de puntos requeridos para realizar una transformacin de orden t es:
Use ms puntos que el nmero mnimo de GCPs siempre que sea posible. Aunque es
posible conseguir un ajuste perfecto, ello es poco comn, no importa cuntos GCPs se
usen.
Para transformaciones entre 1 y n rdenes, el nmero mnimo de GCPs requeridos para
realizar una transformacin se indica en la tabla siguiente:
Tabla 9-1 Nmero de GCPs por Orden de Transformacin
Para los mejores resultados de rectificacin, usted debe usar siempre un nmero de GCPs
mayor que el mnimo, y ellos deben estar bien distribuidos..
ERDAS Field Cuide
360
Rubber Sheeting
Anlisis de Elementos Finitos Basado en Tringulos
El anlisis de elementos finitos es una herramienta poderosa para resolver problemas de
clculo complicados que pueden ser examinados en pedazos pequeos ms simples. Se
ha usado como una tcnica de interpolacin local en aplicaciones geogrficas. Para
rectificacin de imgenes, los puntos de control conocidos pueden ser triangulados en
muchos tringulos. Cada tringulo tiene tres puntos de control como sus vrtices. Luego,
la transformacin polinmica puede ser usada para establecer relaciones matemticas
entre los sistemas fuente y destino para cada tringulo. Como la transformacin pasa
exactamente a travs de cada punto de control y no lo hace de manera uniforme, el
anlisis de elementos finitos tambin se conoce como rubber sheeting. Tambin puede
llamarse rectificacin basada en tringulos porque la transformacin y el remuestreo para
la rectificacin de la imagen son realizados tringulo a tringulo.
Esta tcnica basada en tringulos debera usarse cuando otros mtodos de rectificacin
tales como la transformacin polinmica y el modelamiento fotogramtrico no pueden
producir resultados aceptables.
Triangulacin
Para realizar una rectificacin basada en tringulos, es necesario triangular los puntos de
control en un malla de tringulos. Watson (1994) hizo un resumen de cuatro clases de
triangulacin, incluyendo arbitraria, ptima, Greedy y Delaunay triangulation. De las cuatro
clases, la triangulacin Delaunay es la ms usada y es adoptada debido a que las
variaciones de ngulo de los tringulos resultantes es ms pequea.
La triangulacin Delaunay puede ser construida mediante el criterio de la circunferencia
vaca. La circunferencia formada a partir de los tres puntos de cualquier tringulo no debe
tener ningn otro punto adentro. Los tringulos definidos de esta manera son los ms
equiangulares posibles.
La Figura 9-10 muestra un ejemplo de la red de tringulos formada por 13 puntos de
control.
Figura 9-10 Red de Tringulos
ERDAS Field Cuide
361
Rectificacin basada en Tringulos
Luego que se ha generado una malla triangular y est disponible el orden espacial de los
puntos de control, la rectificacin geomtrica puede ser realizada tringulo a tringulo.
Este mtodo basado en tringulos es atractivo porque divide la regin entera en
subconjuntos ms pequeos. Si el problema geomtrico de la regin entera es muy
complicado, la geometra de cada subconjunto puede ser mucho ms simple y modelada
a travs de transformaciones simples. Para cada tringulo, los polinomios se pueden usar
como la forma de transformacin general entre los sistemas fuente y destino.
Transformacin Lineal
La ms fcil y rpida es la transformacin lineal con los polinomios de primer orden:
No hay necesidad de informacin extra porque existen tres condiciones conocidas en
cada tringulo y tres coeficientes desconocidos para cada polinomio.
Transformacin No Lineal
An cuando la transformacin lineal es fcil y rpida, tiene una desventaja. La transicin
entre tringulos no siempre es suave. Este fenmeno es obvio cuando se derivan curvas
de nivel o relieve sombreado de DEM que se han generado usando rubber sheeting. Ello
se debe a la incorporacin del cambio de pendiente de los datos de control en los ejes y
vrtices de los tringulos. Con el fin de distribuir los cambios de pendiente de manera
suave entre los tringulos, la transformacin no lineal con un orden polinmico mayor que
uno, se usa considerando la informacin de gradiente.
Una transformacin polinmica quntica o de quinto orden se escoge aqu como tcnica
de rubber sheeting en esta disertacin. Ella es una funcin suave. La funcin de
transformacin y su derivada parcial de primer orden son continuas. No es difcil
construirlas (Akima 1978). La formulacin es simplemente la siguiente:
la cual tiene 21 coeficientes por cada polinomio que deben ser determinados. Para
encontrar estas incgnitas, deben estar disponibles 21 condiciones. Para cada vrtice del
tringulo, se tiene el valor de un punto, y se pueden obtener fcilmente dos derivadas
parciales de primer orden y tres de segundo orden usando vrtices en la vecindad del
vrtice. Entonces, se tienen 18 condiciones listas para ser usadas. Tres condiciones
adicionales se pueden obtener asumiendo que la derivada parcial normal en cada eje del
tringulo es un polinomio cbico, lo cual significa que la suma de los items del polinomio
ms all del tercer orden en la derivada parcial normal tiene un valor de cero.
ERDAS Field Cuide
362
Anlisis de Puntos de Chequeo
Debe enfatizarse que el anlisis de puntos de chequeo independientes es crtico para
determinar la exactitud del modelamiento rubber sheeting. Para un mtodo de
modelamiento exacto como rubber sheeting, los puntos de control terrestre, que son
usados en el proceso de modelamiento, no existen residuales geomtricos significativos.
Para evaluar la transformacin geomtrica entre los sistemas de coordenadas fuente y
destino, se recomienda la evaluacin de la exactitud usando puntos de chequeo
independientes.
Error RMS
El error RMS es la distancia entre la posicin de entrada (fuente) de un GCP y la posicin
retransformada del mismo GCP. En otras palabras, es la diferencia entre la coordenada
de salida deseada y la coordenada de salida real para el mismo punto, cuando el punto es
transformado con la transformacin geomtrica.
El error RMS es calculado con una ecuacin de distancia:
Donde:
x
i
e y
i
son las coordenadas fuente de entrada
x
r
e y
r
son las coordenadas retransformadas
El error RMS se expresa como distancia en el sistema de coordenadas fuente. Si las
coordenadas del archivo de los datos son las coordenadas fuente, entonces el error RMS
es una distancia en unidades de pixel. Por ejemplo, un error RMS de 2 significa que el
pixel de referencia est 2 pixeles lejos del pixel retransformado.
Residuales y Error RMS por GCP
La herramienta GCP Tool contiene columnas para los residuales X y Y. Los residuales
son las distancias entre las coordenadas fuente y las coordenadas retransformadas, en
una direccin. Ellas se muestran para cada GCP. El residual X es la distancia entre la
coordenada X fuente y la coordenada X retransformada. El residual Y es la distancia entre
la coordenada Y fuente y la coordenada Y retransformada.
Si los GCPs estn consistentemente desplazadados, sea en la direccin X o en la
direccin Y, se deben agregar ms puntos en esa direccin. Este es un problema comn
en datos fuera del nadir.
Error RMS por GCP
El error RMS de cada punto es reportado para ayudar a evaluar los GCPs. Este se calcula
con una frmula de distancia:
Donde:
R
i
= el error RMS para GCP
i
XR
i
= el residual X para GCP
i
YR
i
= el residual Y para GCP
i
ERDAS Field Cuide
363
La Figura 9-11 ilustra la relacin entre los residuales y el error RMS por punto.
Error RMS Total
A partir de los residuales, se realizan los siguientes clculos para determinar el error total
RMS, el error RMS X y el error RMS Y.
Donde:
R
x
= error RMS X
R
y
= error RMS Y
T= error RMS total
n= nmero de GCPs
i= nmero del GCP
XR
i
= residual X para el GCPi
YR
i
= residual Y para el GCPi
Contribucin del Error por punto
Un valor normalizado que representa el error RMS de cada punto en relacin al error RMS
total tambin es reportado. Este valor es listado en la columna Contribution de la
herramienta GCP Tool.
ERDAS Field Cuide
364
Donde:
E
i
= contribucin al error del punto GCPi
R
i
= error RMS para GCPi
T = error RMS total
Tolerancia del Error RMS
En la mayora de los casos, es ventajoso tolerar una cierta cantidad de error en lugar de
realizar una transformacin compleja. La cantidad de error RMS que es tolerada puede
ser imaginada como una ventana alrededor de cada coordenada fuente, dentro de la cual
una coordenada retransformada se considera correcta (es decir, suficientemente
cercana). Por ejemplo, si la tolerancia de error es 2, entonces el pixel retransformado
puede estar 2 pixles lejos del pixel fuente y an se considera exacto.
Figura 9-12 Tolerancia de Error RMS
El error RMS aceptable est determinado por el uso final de la base de datos, el tipo de
datos que se est usando y los datos histricos usados. Por ejemplo, los GCPs adquiridos
con GPS deberan tener una exactitud de unos 10 m, pero los GCPs tomados de mapas a
escala 1:24,000 deberan tener una exactitud de unos 20 m.
Es importante recordar que el error RMS es reportado en pixeles. Por consiguiente, si
usted est rectificando datos Landsat TM y desea que la rectificacin sea exacta en un
rango mximo de 30 metros, el error RMS no debera ser mayor de 1.00. La exactitud
aceptable depende del rea de la imagen y de cada proyecto particular.
Evaluacin del Error RMS
Para determinar el orden de la transformacin polinmica, usted puede evaluar la
distorsin relativa yendo de la imagen al mapa o del mapa al mapa. Uno debera empezar
con una transformacin de primer orden a menos que sepa que ella no funciona bien. Es
posible calcular repetidamente las matrices de transformacin hasta que se alcance un
error RMS aceptable.
ERDAS Field Cuide
365
La mayora de las rectificaciones son de primer o de segundo orden. El peligro de
usar rectificaciones de orden superior es que entre ms complicada sea la
ecuacin de la transformacin, menos regulares y predecibles son los resultados.
Intentar ajustar todos los GCPs, puede significar mucha distorsin en la imagen.
Despus de cada clculo de una transformacin y de un error RMS, existen cuatro
opciones:
Eliminar el GCP con el error RMS ms alto, asumiendo que este GCP es el menos
exacto. Otra transformacin puede entonces ser calculada a partir de los GCPs
restantes. Un ajuste ms cercano debera ser posible. Sin embargo, si este es el
nico GCP en una regin particular de la imagen, removerlo puede causar errores
ms grandes.
Tolerar una mayor cantidad de error RMS.
Incrementar la complejidad de la transformacin, creando alteraciones geomtricas
ms complejas en la imagen. Luego, se puede calcular una transformacin que
pueda acomodar los GCPs con un error menor.
Seleccione nicamente los puntos en los cuales usted tiene ms confianza.
Mtodos de remuestreo
El siguiente paso en el proceso de rectificacin/registro es crear el archivo de salida. Dado
que la grilla (cuadrcula) de pixeles en imagen fuente pocas veces coincide con la grilla de
la imagen de referencia, los pixeles son remuestreados de tal manera que se puedan
calcular los nuevos niveles digitales para el archivo de salida.
Figura 9-13 Remuestreo
Los siguientes mtodos de remuestreo estn soportados en ERDAS IMAGINE:
ERDAS Field Cuide
366
Vecino ms cercanousa el valor del pixel ms cercano para asignar el valor del
pixel de salida.
Interpolacin bilinealusa los niveles digitales de cuatro pixeles en una ventana
de 2 x 2 para calcular un valor de salida con una funcin bilineal.
Convolucin cbicausa los niveles digitales de 16 pixeles en una ventana de 4 x
4 para calcular el valor de salida con una funcin cbica.
En todos los mtodos, el nmero de filas y de columnas en la salida se calcula a partir de
las dimensiones del mapa de salida, las cuales son determinadas por la transformacin
geomtrica y el tamao de la celda. Las esquinas de salida (superior izquierda e inferior
derecha) del archivo de salida se pueden especificar. Los valores default se calculan de
tal manera que el archivo fuente completo es remuestreado al archivo destino.
Si se est realizando una rectificacin imagen a imagen, puede ser benfico especificar
las esquinas de salida relativas al sistema del archivo de referencia, de manera tal que las
imgenes sean co-registradas. En este caso, las coordenadas X,Y de la esquina superior
izquierda son 0,0 y no los valores default.
Si las unidades de salida son pixeles, entonces el origen de la imagen es la
esquina superior izquierda. De otra manera, el origen es la esquina inferior
izquierda.
Rectificacin a Lat/Lon
Usted puede especificar el tamao de celda nominal si el sistema de coordenadas de
salida es Lat/Lon. El tamao de la celda de salida para una proyeccin geogrfica (por ej,
Lat/Lon) est siempre en unidades angulares de grados decimales. Sin embargo, si usted
desea que la celda tenga un tamao especfico en metros, usted puede ingresar metros y
calcular el tamao equivalente en grados decimales. Por ejemplo, si usted desea que el
tamao de celda del archivo de salida sea 30 x 30 metros, entonces el programa calcula
cul sera ese tamao en grados decimales y automticamente actualizara el tamao de
la celda de salida. Como la transformacin entre medidas angulares (grados decimales) y
nominales (metros) vara a travs de la imagen, la transformacin se basa en el centro del
archivo de salida.
Entre el tamao de celda nominal en el dilogo Nominal Cell Size.
Vecino ms cercano
Para determinar el pixel de salida ms cercano, las coordenadas rectificadas (x
o
,y
o
) del
pixel son retransformadas al sistema de coordenadas fuente usando la inversa de la
transformacin. Las coordenadas retransformadas (x
r
,y
r
) son usadas en la interpolacin
bilineal y en la convolucin cbica tambin. El pixel que est ms cercano a las
coordenadas retransformadas (x
r
,y
r
) es el vecino ms cercano. Los niveles digitales de
ese pixel se convierten en los niveles digitales de la imagen de salida.
ERDAS Field Cuide
367
Figura 9-14 Vecino ms cercano
Tabla 9-2 Remuestreo del Vecino ms cercano
Interpolacin bilineal
En interpolacin bilineal, el nivel digital del pixel rectificado se basa en las distancias entre
la posicin de la coordenada retransformada (x
r
,y
r
) y los cuatro pixeles m;as cercanos en
la imagen de entrada (fuente) (ver Figura 9-15). En este ejemplo, los pixeles vecinos son
numerados 1, 2, 3 y 4. Dados los niveles digitales de estos cuatro pixeles en una grilla, la
tarea es calcular un nivel digital para r (V
r
).
ERDAS Field Cuide
368
Figura 9-15 Interpolacin Bilineal
Para calcular V
r
, primero se deben considerar V
m
y V
n
. Interpolando V
m
y V
n
, usted
puede realizar una interpolacin lineal que es un proceso simple de ilustrar. Si los niveles
digitales son ploteados en una grfico relacionando las distancias entre ellos, es clara la
interpolacin lineal. El nivel digital de m (V
m
) es una funcin del cambio en el nivel digital
entre los pixeles 3 and 1 (es decir, V
3
- V
1
).
Figura 9-16 Interpolacin Lineal
La ecuacin para calcular V
m
a partir de V
1
y V
3
es:
ERDAS Field Cuide
369
Donde:
Y
i
= la coordenada Y del pixel i
V
i
= el nivel digital del pixel i
dy= la distancia entre Y
1
y Y
m
en el sistema de coordenadas fuente
D= la distancia entre Y
1
y Y
3
en el sistema de coordenadas fuente
Si uno considera que (V
3
- V
1
/ D) es la pendiente de la lnea en el grfico de arriba,
entonces esta ecuacin se transforma en la ecuacin de una lnea y = mx + b.
De manera similar, la ecuacin para el clculo del nivel digital para n (V
n
) en la grilla de
pixeles es:
A partir de V
n
y V
m
, el nivel digital de r, que es la posicin de la coordenada
retransformada (x
r
,y
r
), se puede calcular de la misma manera:
La ecuacin siguiente se obtuvo acoplando las ecuaciones para V
m
y V
n
a esta ecuacin
final para V
En la mayora de los casos D = 1, ya que las coordenadas de archivo de los datos se
usan como coordenadas fuentes y ellas tienen incrementos de 1.
Algunas ecuaciones para interpolacin bilineal expresan los niveles digitales de salida
como:
ERDAS Field Cuide
370
Donde:
w
i
es un factor de peso
La ecuacin de arriba podra ser expresada en un formato similar, en el cual el clculo de
w
i
es claro:
Donde:
x
i
= cambio en la direccin X entre (x
r
,y
r
) y la coordenada de archivo de datos del pixel i
y
i
= cambio en la direccin Y entre (x
r
,y
r
) y la coordenada de archivo de datos del pixel i
V
i
= el nivel digital del pixel i
D= la distancia entre pixeles (en X o en Y) en el sistema de coordenadas fuente
Para cada uno de los cuatro pixeles, el nivel digital tiene ms peso si el pixel est ms
cercano a (x
r
,y
r
).
Tabla 9-3 Remuestreo de Interpolacin Bilineal
Vea "CAPITULO 5: Realces" para ms informacin sobre filtros de convolucin.
Convolucin Cbica
La convolucin cbica es similar a la interpolacin bilineal, excepto que:
Un conjunto de 16 pixeles, en un arreglo de 4 x 4, se promedia para determinar el
nivel digital de salida, y
Una aproximacin de funcin cbica, en lugar de lineal, se aplica los 16 valores de
entrada.
ERDAS Field Cuide
371
Para identificar los 16 pixeles en relacin con la coordenada retransformada (x
r
,y
r
), se usa
el pixel (i,j), de manera que:
i = int (x
r
)
j = int (y
r
)
Esto asume que (x
r
,y
r
) est expresado en coordenadas de archivo de datos (pixels). Los
pixeles alrededor (i,j) conforman una grilla de pixeles de entrada de 4 x 4, como se ilustra
en la Figura 9-17.
Figura 9-17 Convolucin Cbica
Como se usa una funcin cbica, en lugar de una lineal, para dar peso a los 16 pixeles de
entrada, los pixeles ms lejanos de (x
r
,y
r
) tienen exponencialmente menos peso que
aquellos que estn cerca de (x
r
,y
r
) .
Diversas versiones de la ecuacin de convolucin cbica son usadas. Las diferentes
ecuaciones tienen tienen diferentes efectos sobre los niveles digitales de salida. Algunas
convoluciones pueden ser similares a un filtro de baja frecuencia (como la interpolacin
bilineal) ayudando a promediar y a suavizar los valores. Otras pueden tender a aumentar
la nitidez de la imagen, de manera similar a un filtro de alta frecuencia. La convolucin
cbica usada en ERDAS IMAGINE es un compromiso entre baja y alta frecuencia. El
efecto general de la convolucin cbica depende de los datos.
La frmula usada en ERDAS IMAGINE es:
ERDAS Field Cuide
372
Donde:
i= int (x
r
)
j= int (y
r
)
d(i,j) = distancia entre un pixel con coordenadas (i,j) y (x
r
,y
r
)
V(i,j) = el nivel digital del pixel (i,j)
V
r
= el nivel digital de salida
a= -0.5 (una constante que difiere en otras aplicaciones de convolucin cbica)
f(x)= la siguiente funcin:
Fuente: Atkinson 1985
En la mayora de los casos, un valor de a de -0.5 tiende a producir capas de salida con
una media y una desviacin estndar ms cercana que las de los datos originales
(Atkinson 1985).
Tabla 9-4 Remuestreo de Convolucin Cbica
ERDAS Field Cuide
373
Conversiones de Coordenadas Mapa-a-Mapa
Hay muchas veces en las que usted puede necesitar cambiar un mapa que ya est
registrado en una proyeccin plana a otra proyeccin. Algunos ejemplos son los
siguientes (ESRI 1992):
Cuando se combinan dos mapas con diferentes proyecciones.
Cuando la proyeccin usada en los archivos de la base de datos no produce las
propiedades deseadas de un mapa.
Cuando es necesario combinar datos de ms de una zona de una proyeccin, tales
como UTM o State Plane.
Un cambio en la proyeccin es un cambio geomtrico las distancias, las reas y la
escala son representadas de manera diferente. Por consiguiente, el proceso de
conversin requiere que los pixeles sean remuestreados.
El remuestreo ocasiona que parte de la integridad espectral de los datos se pierda (vea
las desventajas de los mtodos de remuestreo explicadas previamente). As que, no es
muy aconsejable remuestrear los datos que yan sido remuestreados si la exactitud de los
niveles digitales es importante para la aplicacin. Si los datos no rectificados originales
estn disponibles, es mejor rectificar esos datos a un sistema de proyeccin cartogrfica
que perder una generacin convirtiendo datos rectificados y remuestrendolos por
segunda vez.
Proceso de Conversin
Para converitr el sistema de coordenadas cartogrficas de cualquier imagen
goereferenciada, ERDAS IMAGINE proporciona un atajo al proceso de rectificacin. En
este procedimiento, los GCPs son generados automticamente a lo largo de las
intersecciones de una grilla que usted especifica. El programa calcula las coordenadas de
referencia para los GCPs con la frmula de conversin apropiada y con una
transformacin que puede ser usada en el proceso regular de rectificacin.
Datos Vectoriales
La conversin de las coordenadas de mapa de datos vectoriales es mucho ms sencilla
que la conversin de datos raster. Como los datos vectoriales son almacenados mediante
las coordenadas de los nodos, cada coordenada es simplemente convertida usando la
frmula de conversin apropiada. No existen coordenadas entre los nodos que requieran
ser extrapoladas.
Vous aimerez peut-être aussi
- Resumen Malhotra 4Document9 pagesResumen Malhotra 4PalomaNavajasPas encore d'évaluation
- U2 Gestion Aprendizaje OKDocument16 pagesU2 Gestion Aprendizaje OKDustin HurtadoPas encore d'évaluation
- Tutorial Boleta HonorariosDocument5 pagesTutorial Boleta HonorariosDerecho UACh ValdiviaPas encore d'évaluation
- Informe de PracticasDocument4 pagesInforme de PracticasSandra Vanessa Pezo HenriquesPas encore d'évaluation
- INDT1003 U2 S10 Actividad C Introduccion A La FisicaDocument2 pagesINDT1003 U2 S10 Actividad C Introduccion A La FisicasuitheadPas encore d'évaluation
- Guía de ExamenDocument2 pagesGuía de Examenkarimsema106Pas encore d'évaluation
- Qué Es LINGODocument15 pagesQué Es LINGOEmily MontoyaPas encore d'évaluation
- Aec Primaria 5y6 Experienciaaprendizaje8 Educacionfisica Act 1 Exploramos Los Juegos PredeportivosDocument8 pagesAec Primaria 5y6 Experienciaaprendizaje8 Educacionfisica Act 1 Exploramos Los Juegos PredeportivosJose saul Carhuas aldanaPas encore d'évaluation
- Evaluación Unidad I - 13 Junio - Revisión Del IntentoDocument2 pagesEvaluación Unidad I - 13 Junio - Revisión Del IntentoNoemi AguileraPas encore d'évaluation
- Copia de Seguridad de Desarrollo Embrionario OcularDocument4 pagesCopia de Seguridad de Desarrollo Embrionario OcularAnnabell NaranjoPas encore d'évaluation
- Syllabus Anatomia y Escultura DentariaDocument82 pagesSyllabus Anatomia y Escultura DentariaJuan Augusto Fernández TarazonaPas encore d'évaluation
- Imapo Srl.Document26 pagesImapo Srl.Leonelcito Auza FernandezPas encore d'évaluation
- Mis Ojos, Que Codician Cosas Bellas', de Michelangelo Buonarroti - Cultura - EL PAÍSDocument2 pagesMis Ojos, Que Codician Cosas Bellas', de Michelangelo Buonarroti - Cultura - EL PAÍSmegustapregaPas encore d'évaluation
- 219.973 Valor Neto:: Item Codigo Producto Upre Unidades Kilos Vlr. Unit Vlr. Bruto Dcto %iva Vlr. Iva Vlr. NetoDocument1 page219.973 Valor Neto:: Item Codigo Producto Upre Unidades Kilos Vlr. Unit Vlr. Bruto Dcto %iva Vlr. Iva Vlr. NetoGustavo BaletaPas encore d'évaluation
- Fabricación de JabonesDocument13 pagesFabricación de JabonesRAFAEL TORTOSAPas encore d'évaluation
- Ley de Coulomb y Campo EléctricoDocument22 pagesLey de Coulomb y Campo EléctricocarlosPas encore d'évaluation
- Medición y Ensayos EléctricosDocument22 pagesMedición y Ensayos EléctricosGualadrakePas encore d'évaluation
- Compresores y BombasDocument9 pagesCompresores y BombasGarcia Vazquez Diego SebastianPas encore d'évaluation
- COMU - ACTIVIDAD 2 - Tercero y CuartoDocument6 pagesCOMU - ACTIVIDAD 2 - Tercero y Cuartojulia salinas dominguezPas encore d'évaluation
- Spsu-862 Ejercicio U005-55Document3 pagesSpsu-862 Ejercicio U005-55olga raquel gonzalesPas encore d'évaluation
- Examen Cognitivo Junio 2010 Modelo BDocument7 pagesExamen Cognitivo Junio 2010 Modelo BIsaac ParejaPas encore d'évaluation
- Informe 4 Lab Quimica Camilo GrajalesDocument6 pagesInforme 4 Lab Quimica Camilo Grajalescamilo grajalesPas encore d'évaluation
- Estructura de Los Sistemas de InformaciónDocument6 pagesEstructura de Los Sistemas de InformaciónMaría Leandro MansillaPas encore d'évaluation
- Ensayo en Base Del Libro de La Rebelión de Las RatasDocument9 pagesEnsayo en Base Del Libro de La Rebelión de Las RatasLaura Alejandra Bernal CortesPas encore d'évaluation
- Catalogo ConcentricoDocument2 pagesCatalogo Concentricosanmarcos5154Pas encore d'évaluation
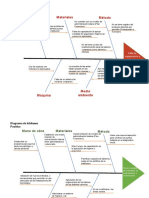
- Diagramas IsickawuaDocument2 pagesDiagramas IsickawuaGianni VázquezPas encore d'évaluation
- Manual PSIMDocument21 pagesManual PSIMEsbany Lanchipa SanchezPas encore d'évaluation
- Contrato de SoporteDocument6 pagesContrato de SoporteSergio PurizacaPas encore d'évaluation
- Que Es Un Organizador VisualDocument3 pagesQue Es Un Organizador VisualLourdes Katherin EvaristoPas encore d'évaluation
- Interfaz de Power PointDocument9 pagesInterfaz de Power PointBRISA ADILENE AROÑA MANZANOPas encore d'évaluation