Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Equilibrium Statics ProblemsDocument10 pagesEquilibrium Statics ProblemsTheAznPas encore d'évaluation
- V"&i' S Hye: ?,ttni Or&o (Document7 pagesV"&i' S Hye: ?,ttni Or&o (Voicu ClaudiuPas encore d'évaluation
- Catia Part DesignDocument244 pagesCatia Part DesignNavaneeth KGPas encore d'évaluation
- Cap Cardan ModelDocument1 pageCap Cardan ModelVoicu ClaudiuPas encore d'évaluation
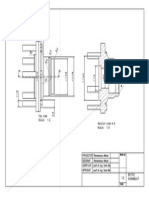
- Butuc Asamblat 1:2: Desenat Verificat Romanescu Adrian Prof. Dr. Ing. Sorin IlieDocument1 pageButuc Asamblat 1:2: Desenat Verificat Romanescu Adrian Prof. Dr. Ing. Sorin IlieVoicu ClaudiuPas encore d'évaluation
- I-As Iso: Yv 3) ( o T Wae ( W'r7ilo - Ay) Y J/ FDocument2 pagesI-As Iso: Yv 3) ( o T Wae ( W'r7ilo - Ay) Y J/ FMihai StancuPas encore d'évaluation
- BielaDocument1 pageBielaMihai StancuPas encore d'évaluation
- Circuite de MultiplexareDocument4 pagesCircuite de MultiplexareVoicu ClaudiuPas encore d'évaluation
- Ampatementul: LatimeaDocument5 pagesAmpatementul: LatimeaVoicu ClaudiuPas encore d'évaluation
- Energy and StyffDocument18 pagesEnergy and StyffscrappyvPas encore d'évaluation
- Science ReviewerDocument3 pagesScience ReviewerLily CollinsPas encore d'évaluation
- Chem NotesDocument148 pagesChem Noteskiruba devi .kPas encore d'évaluation
- Journal of Materials Chemistry A: Feature ArticleDocument14 pagesJournal of Materials Chemistry A: Feature ArticleAnonymous Wcj4C3jPas encore d'évaluation
- E-Portfolio On Elec and MagnetismDocument20 pagesE-Portfolio On Elec and MagnetismJanine CammagayPas encore d'évaluation
- Design and Fabrication of Pedal Operated Water PumpDocument14 pagesDesign and Fabrication of Pedal Operated Water PumpNagesh Sunny67% (3)
- Feb 3 Questions Nuclear WasteDocument4 pagesFeb 3 Questions Nuclear WastedcudfhiudfiuPas encore d'évaluation
- Wichita Clutch Spring Set BrakesDocument12 pagesWichita Clutch Spring Set Brakesayman akrab100% (1)
- Verify 87Document443 pagesVerify 87qwdtPas encore d'évaluation
- Class 11 Chemistry Chapter 2 Atomic StructureDocument44 pagesClass 11 Chemistry Chapter 2 Atomic StructureamirbadshahPas encore d'évaluation
- Modeling Species Transport and Finite-Rate Chemistry: C Fluent Inc. September 29, 2006Document64 pagesModeling Species Transport and Finite-Rate Chemistry: C Fluent Inc. September 29, 2006Azharuddin Ehtesham Farooqui100% (1)
- Dynamics of RotationDocument32 pagesDynamics of RotationMedha Jog KatdarePas encore d'évaluation
- Synthesis and Characterization of Pegylated Polypropyleneimine (Ppi) Dendrimer Loaded Prednisolone For Antileukemic ActivityDocument11 pagesSynthesis and Characterization of Pegylated Polypropyleneimine (Ppi) Dendrimer Loaded Prednisolone For Antileukemic ActivityRAPPORTS DE PHARMACIEPas encore d'évaluation
- 16 FY13CE Mathematics QPDocument14 pages16 FY13CE Mathematics QPyog deviPas encore d'évaluation
- Photolysis Study by FtirDocument8 pagesPhotolysis Study by FtirrakibhossainPas encore d'évaluation
- Full Scale AnalysisDocument43 pagesFull Scale Analysispaulogud6170Pas encore d'évaluation
- CHM095 PDFDocument7 pagesCHM095 PDFHaiqal AzizPas encore d'évaluation
- Searching For CometsDocument2 pagesSearching For CometspianomagicianPas encore d'évaluation
- 2nd Half Book Ist Year PHYSICSDocument4 pages2nd Half Book Ist Year PHYSICSranaateeq100% (1)
- ChemDraw TrainingDocument64 pagesChemDraw Trainingslash_de_law7484Pas encore d'évaluation
- Symmetrical Faults: Instructor: Mohammad Abdul BaseerDocument45 pagesSymmetrical Faults: Instructor: Mohammad Abdul Baseernehal hasnain refathPas encore d'évaluation
- Welding ImperfectionsDocument39 pagesWelding ImperfectionsAnonymousPas encore d'évaluation
- Complex Reactions: Dr. Rer. Nat. Deni RahmatDocument38 pagesComplex Reactions: Dr. Rer. Nat. Deni Rahmathelenismaya100% (1)
- 03 Quiz 1ADocument2 pages03 Quiz 1AKing CjPas encore d'évaluation
- Gcse Physics Answers and Mark Schemes: ChargeDocument8 pagesGcse Physics Answers and Mark Schemes: ChargeChristina T Z-chYnPas encore d'évaluation
- Terrestrial Ionosphere - Part1/2Document31 pagesTerrestrial Ionosphere - Part1/2voidnamexxxPas encore d'évaluation
- Unit 7 WA #3 Equilibrium Lamp and Board - 1 Honors Physics, Section 8 - WebAssignDocument8 pagesUnit 7 WA #3 Equilibrium Lamp and Board - 1 Honors Physics, Section 8 - WebAssignnic0mon772Pas encore d'évaluation
- Presentation On LHB BOGIESDocument38 pagesPresentation On LHB BOGIESVijay AnandPas encore d'évaluation
- Molecular Weight & Polymer Solutions: Chemical and Bioengineering Konkuk UniversityDocument35 pagesMolecular Weight & Polymer Solutions: Chemical and Bioengineering Konkuk UniversityArraafi FadhillahPas encore d'évaluation