Vous aimerez peut-être aussi
- La Ciencia en La Sociedad Inteligibilidad e InfluenciaDocument14 pagesLa Ciencia en La Sociedad Inteligibilidad e InfluenciauwuPas encore d'évaluation
- PermeabilidadDocument28 pagesPermeabilidadPayetCesarPas encore d'évaluation
- Ficha Tecnica OPzS VesnaDocument1 pageFicha Tecnica OPzS VesnaAnonymous y4YES82Pas encore d'évaluation
- Guía 6 - Cálculo Avanzado (2006)Document3 pagesGuía 6 - Cálculo Avanzado (2006)JSJSJSJSPas encore d'évaluation
- SERVOCUNA BN-100 Manual Español R 1.2Document31 pagesSERVOCUNA BN-100 Manual Español R 1.2STEFHANIA LONGASPas encore d'évaluation
- Tabla PeriodicaDocument3 pagesTabla PeriodicaMiguel Ángel Méndez RíosPas encore d'évaluation
- 20 Trabajado Metalico de LáminasDocument9 pages20 Trabajado Metalico de LáminasRussell Alba SoriaPas encore d'évaluation
- Endurecimiento Por PrecipitacionDocument8 pagesEndurecimiento Por PrecipitacionYazmin Guevara0% (1)
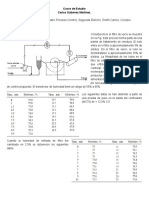
- Casos de EstudioDocument3 pagesCasos de EstudioENRIQUE ROBLESPas encore d'évaluation
- Matematicas 11 Guía Segundo Periodo FuncionesDocument20 pagesMatematicas 11 Guía Segundo Periodo FuncionesPedro Márquez OteroPas encore d'évaluation
- Castilla Leon 2018 Turno 1 2 3 E3Document2 pagesCastilla Leon 2018 Turno 1 2 3 E3oficinadirectaPas encore d'évaluation
- f01 s05 HT Leyes de NewtonDocument2 pagesf01 s05 HT Leyes de Newtonfoca88Pas encore d'évaluation
- Defensa PersonalDocument28 pagesDefensa PersonalAnaLesviaFlorezPas encore d'évaluation
- VC M Manual (Esp)Document22 pagesVC M Manual (Esp)Ixbalamhu CastellanosPas encore d'évaluation
- Mas ForzadoDocument9 pagesMas ForzadoPaolo RosasPas encore d'évaluation
- Balance de Energia y Materia UntDocument14 pagesBalance de Energia y Materia UntFernanda Nicole Miro Quezada PanaifoPas encore d'évaluation
- Transporte de Fluidos Ecuacion de BernoulliDocument8 pagesTransporte de Fluidos Ecuacion de BernoulliLilian MorganPas encore d'évaluation
- Dilatacion de SolidosDocument7 pagesDilatacion de SolidosCarolina Ticona VargasPas encore d'évaluation
- Estudio Cinetico de La Descomposicion Catalizada de Peroxido de Hibrogeno Sobre Carbon ActivadoDocument5 pagesEstudio Cinetico de La Descomposicion Catalizada de Peroxido de Hibrogeno Sobre Carbon ActivadoDyanys CarolynaPas encore d'évaluation
- Docsity Solucionario PreuniversitarioDocument12 pagesDocsity Solucionario Preuniversitariocecilia cusihualpa alfaroPas encore d'évaluation
- Quimica de Los Almidones (Maiz)Document126 pagesQuimica de Los Almidones (Maiz)Marlene RiveroPas encore d'évaluation
- Determinacion de Muestras Alcalinas.Document11 pagesDeterminacion de Muestras Alcalinas.lili46140% (1)
- Laboratorio Sobre Pupitres ErgonómicosDocument37 pagesLaboratorio Sobre Pupitres ErgonómicosRobertoPas encore d'évaluation
- Fluidos NewtonianosDocument17 pagesFluidos NewtonianosAnonimus Anonimus anonimusPas encore d'évaluation
- CYPE - Esfuerzos y Armados de Pilares, Pantallas y MurosDocument95 pagesCYPE - Esfuerzos y Armados de Pilares, Pantallas y MurosPabloPolinesioPas encore d'évaluation
- 7 MF - Flujo Uniforme y Diseño de Canales - 2015 - 2 para PDFDocument156 pages7 MF - Flujo Uniforme y Diseño de Canales - 2015 - 2 para PDFAnonymous 5PozSmkN5B0% (1)
- Wigetta y El Antidoto Secreto PDFDocument22 pagesWigetta y El Antidoto Secreto PDFllixlemont diaz100% (2)
- Cromado de Fibra de VidrioDocument2 pagesCromado de Fibra de VidrioJuan Carlos Barberán MuñozPas encore d'évaluation
- Plantilla EDP-L-001 Plan General de Construcción EDP-RaPDocument16 pagesPlantilla EDP-L-001 Plan General de Construcción EDP-RaPRafa Pontón RPas encore d'évaluation