Vous aimerez peut-être aussi
- Tarea 6 TermodinámicaDocument12 pagesTarea 6 TermodinámicaSolange Inzunza Moscoso100% (6)
- Compresores LGDocument25 pagesCompresores LGrefreon63% (8)
- Manual CCS EspañolDocument70 pagesManual CCS Españoljkfran50% (4)
- Diseño T Const. Edificio Viv. MultifamiliarDocument188 pagesDiseño T Const. Edificio Viv. Multifamiliarlapa44100% (1)
- Introducción A La Transformación Digital 1Document56 pagesIntroducción A La Transformación Digital 1Lcdo. German A. Salas OjedaPas encore d'évaluation
- Examen ResueltoDocument9 pagesExamen ResueltoAlex Benigno100% (1)
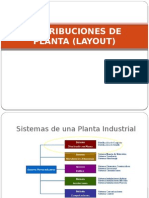
- Distribución de planta: conceptos, objetivos y tipos básicosDocument99 pagesDistribución de planta: conceptos, objetivos y tipos básicoscvegasuazo100% (1)
- Entregable 3 Tarea 6,7Document8 pagesEntregable 3 Tarea 6,7Mildred MartinezPas encore d'évaluation
- Diptico Planetario para CONACyTDocument2 pagesDiptico Planetario para CONACyTIsmael RendonPas encore d'évaluation
- Electroneumática prácticas presencialesDocument17 pagesElectroneumática prácticas presencialesIsmael RendonPas encore d'évaluation
- FSMDocument23 pagesFSMAlejandro Gonzalez BecerrilPas encore d'évaluation
- Sistemas Electronicos de ControlDocument84 pagesSistemas Electronicos de ControlJohn C. MontesPas encore d'évaluation
- Monitorizacion y Control Remoto Virtual de La Planta Gunt Hamburg RTDocument6 pagesMonitorizacion y Control Remoto Virtual de La Planta Gunt Hamburg RTIsmael RendonPas encore d'évaluation
- 3 Ingle PDFDocument11 pages3 Ingle PDFIsmael RendonPas encore d'évaluation
- Integradora I PDFDocument18 pagesIntegradora I PDFIsmael RendonPas encore d'évaluation
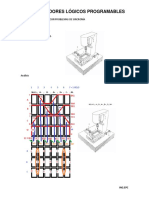
- Controladores Logicos Programables PDFDocument19 pagesControladores Logicos Programables PDFIsmael Rendon0% (1)
- Sistemas de Control AutomaticoDocument25 pagesSistemas de Control AutomaticoYessyRinconPas encore d'évaluation
- 3 Formacion Sociocultural IIIDocument11 pages3 Formacion Sociocultural IIILau SmsPas encore d'évaluation
- 1 Control Estadístico de ProcesosDocument21 pages1 Control Estadístico de ProcesosIsmael RendonPas encore d'évaluation
- Principios Generales Del Control de MotoresDocument18 pagesPrincipios Generales Del Control de MotoresIsmael RendonPas encore d'évaluation
- Capitulo 1 de Tesis Listo InformaticaDocument6 pagesCapitulo 1 de Tesis Listo InformaticayocklymerPas encore d'évaluation
- Leyes Fundamentales de La IngenieriaDocument8 pagesLeyes Fundamentales de La IngenieriaRuben PulidoPas encore d'évaluation
- Tarifa Termos 2018Document4 pagesTarifa Termos 2018Juan AlberolaPas encore d'évaluation
- Qué Es Lo Que Hace Un Técnico Electricista IndustrialDocument7 pagesQué Es Lo Que Hace Un Técnico Electricista Industrialagustin cordobaPas encore d'évaluation
- Automatización y CNC: procesos y ventajasDocument50 pagesAutomatización y CNC: procesos y ventajasluisorna50% (2)
- Calefacción 2011Document13 pagesCalefacción 2011Javier SosaPas encore d'évaluation
- Buses CampoDocument7 pagesBuses CampoEduardo Collazo MenaPas encore d'évaluation
- Automatización INTEGRADORA IIDocument8 pagesAutomatización INTEGRADORA IILazaro MorenoPas encore d'évaluation
- Uni CursosDocument4 pagesUni CursosFerdinand RaulPas encore d'évaluation
- Diseño e Implementacion de Un Sistema de Adquisicion PlastileneDocument6 pagesDiseño e Implementacion de Un Sistema de Adquisicion PlastileneHernan SuarezPas encore d'évaluation
- Circuitos Secuenciales Con Problemas de SincroníaDocument5 pagesCircuitos Secuenciales Con Problemas de SincroníaGabo MartzPas encore d'évaluation
- Criterios de Evaluacion de WRO para Futuros Innovadores WRO 2023Document4 pagesCriterios de Evaluacion de WRO para Futuros Innovadores WRO 2023Dalvis OjoPas encore d'évaluation
- Simatic S7-1500 EsDocument14 pagesSimatic S7-1500 Escristhian mejiaPas encore d'évaluation
- 12401257Document9 pages12401257ReneMartinezGutierrezPas encore d'évaluation
- Guia 1 Periodo 2 Tecnologia Grado 7 Martha Elena PDFDocument4 pagesGuia 1 Periodo 2 Tecnologia Grado 7 Martha Elena PDFLEYDE MUÑOZPas encore d'évaluation
- Avance TecnológicoDocument5 pagesAvance TecnológicostefanyPas encore d'évaluation
- BCT 008 573 1C Unidades Condensadoras CHDocument4 pagesBCT 008 573 1C Unidades Condensadoras CHSean JonesPas encore d'évaluation
- Automatism OsDocument42 pagesAutomatism OsSebas ValenciaPas encore d'évaluation
- Mejora y ampliación del servicio de educación superior en CangalloDocument4 pagesMejora y ampliación del servicio de educación superior en CangalloRaùl Espinoza ZuñigaPas encore d'évaluation
- Trabajo de Automatizacion IndustrialDocument5 pagesTrabajo de Automatizacion IndustrialMIGUEL ANGEL MARTINEZ ROJANOPas encore d'évaluation
- Informe Proyecto InvernaderoDocument13 pagesInforme Proyecto Invernaderojaimeb2006Pas encore d'évaluation
- Ingeniería Industrial: funciones y habilidadesDocument10 pagesIngeniería Industrial: funciones y habilidadesIturielLaraPas encore d'évaluation
- Reporte de Automatización IndustrialDocument3 pagesReporte de Automatización IndustrialJesus De Roa TenoriosPas encore d'évaluation