Vous aimerez peut-être aussi
- Two-Dimensional Elasticity Theories and Plane ProblemsDocument18 pagesTwo-Dimensional Elasticity Theories and Plane ProblemsHk Lorilla QuongPas encore d'évaluation
- Convolution and Signal Processing FundamentalsDocument22 pagesConvolution and Signal Processing Fundamentals174A1 HindupriyaPas encore d'évaluation
- Subroutine For Cohesive ElementDocument41 pagesSubroutine For Cohesive ElementBhushanRaj100% (1)
- Chapter 8 Two-Dimensional Problem SolutionDocument51 pagesChapter 8 Two-Dimensional Problem SolutionJoseph Daguio JrPas encore d'évaluation
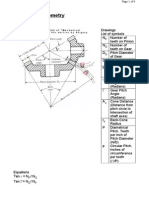
- Design-II, 2016 Bevel Gear Design ProcedureDocument1 pageDesign-II, 2016 Bevel Gear Design ProcedureenggsantuPas encore d'évaluation
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagotePas encore d'évaluation
- PVEfea Assembly AnalysisDocument20 pagesPVEfea Assembly AnalysisAnandh PsPas encore d'évaluation
- Deflection Calculation Due To Imposed Load On Corridor JoistDocument14 pagesDeflection Calculation Due To Imposed Load On Corridor JoistranjitPas encore d'évaluation
- Damped SDOF vibration analysisDocument13 pagesDamped SDOF vibration analysisAli Haider RizviPas encore d'évaluation
- Damping SystemDocument6 pagesDamping SystemEro DoppleganggerPas encore d'évaluation
- BMD SFDDocument3 pagesBMD SFDShrinath ShetPas encore d'évaluation
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDocument12 pages2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuPas encore d'évaluation
- Bevel GearDocument17 pagesBevel Gearparesh09Pas encore d'évaluation
- Lecture Static FailureDocument6 pagesLecture Static FailureKelly MooneyPas encore d'évaluation
- Solving Dynamics Problems in MathcadDocument9 pagesSolving Dynamics Problems in MathcadMario Jucharo LaymePas encore d'évaluation
- CohesiveZoneModels PDFDocument31 pagesCohesiveZoneModels PDFGopal KondaguntaPas encore d'évaluation
- Semiconductors MathcadDocument5 pagesSemiconductors MathcadGerardo Silva OelkerPas encore d'évaluation
- Fatigue Behavior of Materials Under Strain Cycling in Low and Intermediate Life Range PDFDocument58 pagesFatigue Behavior of Materials Under Strain Cycling in Low and Intermediate Life Range PDFLeonardo TerraPas encore d'évaluation
- Bolted Connections: 1.1 Range and Class of The Screw FastenersDocument8 pagesBolted Connections: 1.1 Range and Class of The Screw FastenersksPas encore d'évaluation
- Bevel ExplanationDocument4 pagesBevel ExplanationVarun VaidyaPas encore d'évaluation
- Major Project ShredderDocument12 pagesMajor Project Shredderaman kumarPas encore d'évaluation
- 08 Chapter3Document28 pages08 Chapter3Eldreds Guillermo EnalisanPas encore d'évaluation
- FEA Report PDFDocument24 pagesFEA Report PDFDanish JavedPas encore d'évaluation
- Bevel Gear Pair Transmission DesignDocument12 pagesBevel Gear Pair Transmission Designrip111176Pas encore d'évaluation
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocument14 pagesWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsShubham mishraPas encore d'évaluation
- MESYS Shaft Calculation GuideDocument28 pagesMESYS Shaft Calculation GuideZoebairPas encore d'évaluation
- Tensile Testing of Ferrous and Non-Ferrous AlloyDocument7 pagesTensile Testing of Ferrous and Non-Ferrous Alloyrama100% (1)
- FEM Continum Overview and SolutionDocument22 pagesFEM Continum Overview and Solutionsubash sahPas encore d'évaluation
- STRESS-STRAINDocument14 pagesSTRESS-STRAINcikmonPas encore d'évaluation
- Modal Space - in Our Own Little World: by Pete AvitabileDocument2 pagesModal Space - in Our Own Little World: by Pete AvitabileVignesh SelvarajPas encore d'évaluation
- Real Mode and Complex ModeDocument2 pagesReal Mode and Complex ModeTao Lai100% (2)
- Bond-Slip Model For Detailed Finite-Element AnalysisDocument10 pagesBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighPas encore d'évaluation
- Lecture 2A Macro Mechanics Stress Strain Relations For Material TypesDocument15 pagesLecture 2A Macro Mechanics Stress Strain Relations For Material TypesHarish ShridharamurthyPas encore d'évaluation
- Experiments in Engineering Physics: Sem Ii (Document43 pagesExperiments in Engineering Physics: Sem Ii (SiddhinathPas encore d'évaluation
- Homework 5Document2 pagesHomework 5Arthur DingPas encore d'évaluation
- Lug Analysis MechaniCalcDocument29 pagesLug Analysis MechaniCalcOSCARDELTAPas encore d'évaluation
- Lab 5 - Vibration of A Cantilever BeamDocument4 pagesLab 5 - Vibration of A Cantilever BeamChristian Giron100% (1)
- Differentiation Under Integral SignDocument21 pagesDifferentiation Under Integral Signap021100% (1)
- Fatigue Crack Propagation and Creep Life PredictionDocument4 pagesFatigue Crack Propagation and Creep Life PredictionSok SinPas encore d'évaluation
- Free Vibration With DampingDocument31 pagesFree Vibration With Dampingriya pradhanPas encore d'évaluation
- 12-3 Energy in SHM (P304Document19 pages12-3 Energy in SHM (P304tuikbe100% (1)
- Cycle Counting Methods For FatigueDocument7 pagesCycle Counting Methods For FatigueArdiyan Arezel ArdhyPas encore d'évaluation
- Wind and Earthquake Analysis Results SummaryDocument8 pagesWind and Earthquake Analysis Results SummaryBrahim HammamiPas encore d'évaluation
- 1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of BeamsDocument8 pages1.2 Beams With Uniform Load and End Moments: CHAPTER 1: Analysis of BeamsJavier LopezPas encore d'évaluation
- Is 14812 2005Document12 pagesIs 14812 2005JayDeep KhajurePas encore d'évaluation
- Continuum Mech ProblemsDocument85 pagesContinuum Mech ProblemsDeepak Verma100% (1)
- Bessel FunctionDocument31 pagesBessel FunctionponsepoyPas encore d'évaluation
- Assignment 5 - Y-Joint FatigueDocument5 pagesAssignment 5 - Y-Joint Fatiguenallay17050% (1)
- CH 13Document19 pagesCH 13Eufemio MorenoPas encore d'évaluation
- Inductance, Capacitance, and Mutual Inductance: Assessment ProblemsDocument38 pagesInductance, Capacitance, and Mutual Inductance: Assessment ProblemsHalise GsPas encore d'évaluation
- Peak Position PDFDocument56 pagesPeak Position PDFkumar ujjwalPas encore d'évaluation
- Slot Expansion CalculationDocument1 pageSlot Expansion CalculationSarfaraz KhanPas encore d'évaluation
- Two-dimensional steady conductionDocument81 pagesTwo-dimensional steady conductionYash MoreyPas encore d'évaluation
- 07 Axisymmetric Finite Element ModelingDocument14 pages07 Axisymmetric Finite Element ModelingSchubertDeierlein100% (1)
- Under, Over and Critical DampingDocument5 pagesUnder, Over and Critical DampingErdvanVianRidvanzPas encore d'évaluation
- EP2CD4T4. Harmonic Motion and Resonance NotesDocument27 pagesEP2CD4T4. Harmonic Motion and Resonance NotesJason wonwonPas encore d'évaluation
- SHM Review - SHM Using Differential Equations - Critical DampingDocument18 pagesSHM Review - SHM Using Differential Equations - Critical Dampingaaljuhani123Pas encore d'évaluation
- Tut 5 On PDEsDocument6 pagesTut 5 On PDEsRohan ZendePas encore d'évaluation
- Concourse 18.03 - Lecture #9: MX CX KX X X XDocument4 pagesConcourse 18.03 - Lecture #9: MX CX KX X X XAna Petrovic TomicPas encore d'évaluation
- Traction device for motor vehiclesDocument5 pagesTraction device for motor vehiclesxeron7126Pas encore d'évaluation
- Edelbrock AVS ManualDocument25 pagesEdelbrock AVS ManualMohmaed SharawyPas encore d'évaluation
- Mr. Gasket #6002 Crankcase EvacuationDocument1 pageMr. Gasket #6002 Crankcase Evacuationxeron7126Pas encore d'évaluation
- In-Dash Electric Tachometer: Installation Instructions For Use On Early Model & Most Electronic Ignitions QuestionsDocument2 pagesIn-Dash Electric Tachometer: Installation Instructions For Use On Early Model & Most Electronic Ignitions Questionsxeron7126Pas encore d'évaluation
- Engineering Guide To Casting DesignDocument12 pagesEngineering Guide To Casting Designxeron7126Pas encore d'évaluation
- Earl's Swivel-Seal Hose AssemblyDocument1 pageEarl's Swivel-Seal Hose Assemblyxeron7126Pas encore d'évaluation
- Earl's Oil Cooler Plumbing ChartsDocument2 pagesEarl's Oil Cooler Plumbing Chartsxeron7126Pas encore d'évaluation
- Mechanical Gauges: Installation InstructionsDocument4 pagesMechanical Gauges: Installation Instructionsxeron7126Pas encore d'évaluation
- Earl's Plumbing BasicsDocument4 pagesEarl's Plumbing Basicsxeron7126Pas encore d'évaluation
- Competition Engineering Installation InstructionsDocument3 pagesCompetition Engineering Installation Instructionsxeron7126Pas encore d'évaluation
- Carburetors! Frequently Asked QuestionsDocument5 pagesCarburetors! Frequently Asked Questionsxeron7126Pas encore d'évaluation
- AutoMeter 6811 Pro Comp TachDocument4 pagesAutoMeter 6811 Pro Comp Tachxeron7126Pas encore d'évaluation
- PAI Standard O-Ring Dimensions PDFDocument48 pagesPAI Standard O-Ring Dimensions PDFsalam87Pas encore d'évaluation
- Engine Builder 2016-12Document52 pagesEngine Builder 2016-12xeron7126Pas encore d'évaluation
- AutoMeter Sport Comp InstallationDocument2 pagesAutoMeter Sport Comp Installationxeron7126Pas encore d'évaluation
- Grade N52 Neodymium Magnet Demagnetization CurvesDocument1 pageGrade N52 Neodymium Magnet Demagnetization Curvesxeron7126Pas encore d'évaluation
- Electricity and Magnetism 8.02x, Mit, UsaDocument540 pagesElectricity and Magnetism 8.02x, Mit, UsaRahul JaiswalPas encore d'évaluation
- HTTPS/WWW - Autometer.com/media/manual/2650 1077 PDFDocument2 pagesHTTPS/WWW - Autometer.com/media/manual/2650 1077 PDFCarlos PalmaPas encore d'évaluation
- Wire Size and Length DeterminationDocument11 pagesWire Size and Length Determinationxeron7126Pas encore d'évaluation
- Smalley Designing With Retaining Rings FinalDocument14 pagesSmalley Designing With Retaining Rings Finalxeron7126Pas encore d'évaluation
- Blow MoldDocument52 pagesBlow Moldnmjbose100% (2)
- SWW11 SurfacingWhereDoIStartDocument19 pagesSWW11 SurfacingWhereDoIStartxeron7126Pas encore d'évaluation
- Strength of Materials Parts I&II-TimoshenkoDocument450 pagesStrength of Materials Parts I&II-Timoshenkoapi-370842873% (11)
- Grade N42: Permanent Neodymium Magnet Demagnetization Curves K&J Magnetics, IncDocument1 pageGrade N42: Permanent Neodymium Magnet Demagnetization Curves K&J Magnetics, Incxeron7126Pas encore d'évaluation
- Fluxtrol Resource GuideDocument59 pagesFluxtrol Resource Guidexeron7126Pas encore d'évaluation
- DFMDocument2 pagesDFMkippcamPas encore d'évaluation
- USB, Mini USB, and IEEE 1394 Connectors and Cables GuideDocument19 pagesUSB, Mini USB, and IEEE 1394 Connectors and Cables GuideMochamad RizalPas encore d'évaluation
- Fluid Power Seal GuideDocument424 pagesFluid Power Seal GuideDillibabu RPas encore d'évaluation
- How To Write Engineering Specifications PDFDocument37 pagesHow To Write Engineering Specifications PDFMartha ArgerichPas encore d'évaluation
- J4000 ZC - BN68 07180L 00eng 0323Document2 pagesJ4000 ZC - BN68 07180L 00eng 0323xeron7126Pas encore d'évaluation
- LN - 2 - Relationships Among Bending Moment (M), Shear Force (S) and Load Intensity (P) in A BeamDocument2 pagesLN - 2 - Relationships Among Bending Moment (M), Shear Force (S) and Load Intensity (P) in A BeamKushani PiyumikaPas encore d'évaluation
- Calculate Degree of Static and Kinematic Indeterminacy for Beams and FramesDocument6 pagesCalculate Degree of Static and Kinematic Indeterminacy for Beams and Framesvipin soniPas encore d'évaluation
- Science 7 3RD Q 1Document486 pagesScience 7 3RD Q 1NERALDIN OGORIDAPas encore d'évaluation
- MARITIME GEOTECHNICS I HOMEWORK #2 TOPICS: SHALLOW FOUNDATIONSDocument5 pagesMARITIME GEOTECHNICS I HOMEWORK #2 TOPICS: SHALLOW FOUNDATIONSWilliams AnthonyPas encore d'évaluation
- Unbalanced Magnetic Pull Analysis For Rotordynamics of Induction MotorsDocument7 pagesUnbalanced Magnetic Pull Analysis For Rotordynamics of Induction Motors9096664279Pas encore d'évaluation
- TP Heat Exchanger HT31Document4 pagesTP Heat Exchanger HT31abdel100% (1)
- Unit I Force AnalysisDocument82 pagesUnit I Force AnalysisSaranPas encore d'évaluation
- SBTP CH HGDocument8 pagesSBTP CH HGGautam MondalPas encore d'évaluation
- Magnetostatics Lecture 1Document12 pagesMagnetostatics Lecture 1Chinmaya RathPas encore d'évaluation
- BOX Culvert Bridge Reinforced With FRPDocument8 pagesBOX Culvert Bridge Reinforced With FRPAlsayed DiabPas encore d'évaluation
- Boyle's Law Charles' Law Lab ReportDocument5 pagesBoyle's Law Charles' Law Lab ReportBrenda BarronPas encore d'évaluation
- Structure AnalysisDocument11 pagesStructure AnalysisFarhan KhanPas encore d'évaluation
- Lecture 27 Intro Slipline Field TheoryDocument14 pagesLecture 27 Intro Slipline Field TheoryprasannaPas encore d'évaluation
- Subject CSE40418: Advanced Structural Analysis: Phase I: Structural DynamicsDocument13 pagesSubject CSE40418: Advanced Structural Analysis: Phase I: Structural DynamicsEngibearPas encore d'évaluation
- ElectronicDocument66 pagesElectronicdamith galagedaraPas encore d'évaluation
- Maxwell Indonesia 2Document20 pagesMaxwell Indonesia 2arrowzyPas encore d'évaluation
- AE341 W1 UploadDocument21 pagesAE341 W1 UploadMert YılmazPas encore d'évaluation
- 12 Plaxis Bulletin-With ShotcreteDocument24 pages12 Plaxis Bulletin-With ShotcreteGEOMAHESHPas encore d'évaluation
- AlignmentDocument48 pagesAlignmentFaruque Khan Yumkhaibam100% (7)
- Summary of Mechanical Properties of MaterialsDocument1 pageSummary of Mechanical Properties of Materialsc r maselkowski100% (1)
- 7.bending Moments in BeamsDocument7 pages7.bending Moments in BeamsMoiz AmirPas encore d'évaluation
- Gearless Transmission Project ReportDocument45 pagesGearless Transmission Project ReportAbhijeet MorePas encore d'évaluation
- Assignment: Small Signal Stability: Task1Document13 pagesAssignment: Small Signal Stability: Task1Nouman ChoudhryPas encore d'évaluation
- 2022NOV PSAD UnlockedDocument7 pages2022NOV PSAD UnlockedKristelle V. TorrealbaPas encore d'évaluation
- Fluid-Structure Interaction Modeling of Wind Turbines: Simulating The Full MachineDocument13 pagesFluid-Structure Interaction Modeling of Wind Turbines: Simulating The Full MachineMayra ZezattiPas encore d'évaluation
- MA02 June 2022Document28 pagesMA02 June 2022Vedant DasPas encore d'évaluation
- Laboratory Outcome Based Assessment Guideline: Topic Experiment: Bernoulli Theorem Program Learning Outcomes (Plo)Document6 pagesLaboratory Outcome Based Assessment Guideline: Topic Experiment: Bernoulli Theorem Program Learning Outcomes (Plo)Maslinda JaaffarPas encore d'évaluation
- (PDF) (EPUB) Classical Mechanics Ab Gupta DownloadDocument3 pages(PDF) (EPUB) Classical Mechanics Ab Gupta DownloadSubham Paul11% (9)
- Thrust Block CalculationsDocument5 pagesThrust Block CalculationsNiño Erick Castañares86% (7)