Vous aimerez peut-être aussi
- Ex-Texas Cop Charged For Shooting Teen Eating HamburgerDocument11 pagesEx-Texas Cop Charged For Shooting Teen Eating HamburgerLee ChorneyPas encore d'évaluation
- Cuomo Impeachment Investigation Head Wa... Percussions - After Senior Aide - S TweetDocument6 pagesCuomo Impeachment Investigation Head Wa... Percussions - After Senior Aide - S TweetLee ChorneyPas encore d'évaluation
- Dramatic Elevator Footage Shows Model Assaulting Boyfriend Moments Before His Murder (Update)Document10 pagesDramatic Elevator Footage Shows Model Assaulting Boyfriend Moments Before His Murder (Update)Lee ChorneyPas encore d'évaluation
- Britney Spears Poses Topless in Daisy Dukes For New Instagram PicDocument6 pagesBritney Spears Poses Topless in Daisy Dukes For New Instagram PicLee ChorneyPas encore d'évaluation
- Hawkeye' Spoilers Say Fan-Favorite Marvel Villain Is Coming To The MCUDocument5 pagesHawkeye' Spoilers Say Fan-Favorite Marvel Villain Is Coming To The MCULee ChorneyPas encore d'évaluation
- 8 CENM-HV-F1: Certified Performance DataDocument10 pages8 CENM-HV-F1: Certified Performance DataLee ChorneyPas encore d'évaluation
- Flexmaster U.S.A.® 4NI: Submittal DataDocument1 pageFlexmaster U.S.A.® 4NI: Submittal DataLee ChorneyPas encore d'évaluation
- Riello RTC Data Sheet Rev4Document8 pagesRiello RTC Data Sheet Rev4Lee ChorneyPas encore d'évaluation
- 101 83 - DE - 4300 - 4380 - withIVSDrive - Quick - Installation - GuideDocument4 pages101 83 - DE - 4300 - 4380 - withIVSDrive - Quick - Installation - GuideLee ChorneyPas encore d'évaluation
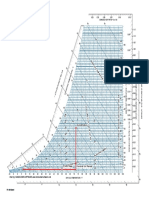
- State Point & Process Report: Psychrometric Chart Psychrometric ChartDocument1 pageState Point & Process Report: Psychrometric Chart Psychrometric ChartLee ChorneyPas encore d'évaluation
- 235-Custom Air Handling Unit Submittal (For Record) - Record Purpose Shop Drawings - 2017-02-03-115802 PDFDocument173 pages235-Custom Air Handling Unit Submittal (For Record) - Record Purpose Shop Drawings - 2017-02-03-115802 PDFLee ChorneyPas encore d'évaluation
- FL TZDocument1 pageFL TZLee ChorneyPas encore d'évaluation
- 4/6/19, 7@15 PM Page 1 of 4Document4 pages4/6/19, 7@15 PM Page 1 of 4Lee ChorneyPas encore d'évaluation
- Why This Trainer Works His Clients For Just 30 MinutesDocument10 pagesWhy This Trainer Works His Clients For Just 30 MinutesLee ChorneyPas encore d'évaluation
- Salma Hayek, 53, Posts Revealing Photo To Celebrate Reaching 12 Million Instagram FollowersDocument8 pagesSalma Hayek, 53, Posts Revealing Photo To Celebrate Reaching 12 Million Instagram FollowersLee ChorneyPas encore d'évaluation
- Works His Clients For Just 30 MinutesDocument1 pageWorks His Clients For Just 30 MinutesLee ChorneyPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Manufacturing Process LabDocument9 pagesManufacturing Process LabJing HengPas encore d'évaluation
- Quadratic EquationsDocument40 pagesQuadratic EquationsWeb Books100% (6)
- MGT602 Quiz 2 290411Document8 pagesMGT602 Quiz 2 290411sonutilkPas encore d'évaluation
- Family Day by Day - The Guide To A Successful Family LifeDocument212 pagesFamily Day by Day - The Guide To A Successful Family Lifeprajya100% (3)
- Toc GMP Manual Ud12Document34 pagesToc GMP Manual Ud12navas1972100% (2)
- BTP ReportDocument27 pagesBTP ReportAayush Ghosh ChoudhuryPas encore d'évaluation
- Indonesia Fertilisers 2009Document5 pagesIndonesia Fertilisers 2009George Van BommelPas encore d'évaluation
- Oracle FLEXCUBE Introduction User Manual PDFDocument166 pagesOracle FLEXCUBE Introduction User Manual PDFriteshPas encore d'évaluation
- Ex 5308-Alexandra Thedeby-Heating and Cooling With Solar Powered Peltier ElementsDocument93 pagesEx 5308-Alexandra Thedeby-Heating and Cooling With Solar Powered Peltier ElementsMohammad NaufalPas encore d'évaluation
- Appendix - F2 - RAPDocument156 pagesAppendix - F2 - RAPMecha MartiniPas encore d'évaluation
- Thesis Report FormatDocument21 pagesThesis Report Formatsebsibe birhanuPas encore d'évaluation
- Damian C. Brady, P .DDocument9 pagesDamian C. Brady, P .Dapi-27484581Pas encore d'évaluation
- GE Power System and Corporate ExpressDocument8 pagesGE Power System and Corporate ExpressdolliePas encore d'évaluation
- Luis Barragan The Eye EmbodiedDocument117 pagesLuis Barragan The Eye Embodiedboremovic100% (1)
- Oracle Rman Duplicate Database FeatureDocument3 pagesOracle Rman Duplicate Database Featuremartin_seaPas encore d'évaluation
- Lab 01 Os PDFDocument7 pagesLab 01 Os PDFAnum Abdul SalamPas encore d'évaluation
- v53nS5 Bio Anthro SupplementDocument272 pagesv53nS5 Bio Anthro SupplementJean-FrançoisVéranPas encore d'évaluation
- Semantics Course BookDocument67 pagesSemantics Course BookJosipa Blažević50% (2)
- Sugar Decolorization Using Ion Exchange Resin in The Refining ProcessDocument4 pagesSugar Decolorization Using Ion Exchange Resin in The Refining ProcessAnonymous k41BMGYDLPas encore d'évaluation
- 09 04 2016-Online-ExamDocument46 pages09 04 2016-Online-ExamAtharva Sheersh PandeyPas encore d'évaluation
- The Future of Humanity ProjectDocument9 pagesThe Future of Humanity Projectapi-479088697Pas encore d'évaluation
- ENFSIDocument8 pagesENFSIkmrdPas encore d'évaluation
- CA Cooling TowerDocument19 pagesCA Cooling TowerKeshia WisePas encore d'évaluation
- Đề 5Document4 pagesĐề 5Nga NguyenPas encore d'évaluation
- Samakande A UnprotectedDocument190 pagesSamakande A Unprotectedathilla27Pas encore d'évaluation
- My Dream Job Essay WritingDocument3 pagesMy Dream Job Essay WritingAnne NgPas encore d'évaluation
- Creating The Fusion EconomyDocument15 pagesCreating The Fusion Economyrocket_science3.0Pas encore d'évaluation
- Teacher Induction Program Module 2Document54 pagesTeacher Induction Program Module 2Acee Lagarto75% (8)
- $RKNVNODDocument8 pages$RKNVNODhoangleeicftPas encore d'évaluation
- Harrah's Entertainment Inc: Submitted To: Prof. Shubhamoy DeyDocument6 pagesHarrah's Entertainment Inc: Submitted To: Prof. Shubhamoy DeyAbhinav UtkarshPas encore d'évaluation