Vous aimerez peut-être aussi
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoD'EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Unidad 3 Analisis EstructuralDocument38 pagesUnidad 3 Analisis EstructuralJulioSanchezJimenez78% (9)
- Excel Analisis SismicoDocument9 pagesExcel Analisis SismicoAldo Greco Nuñonca Herrera50% (2)
- Metodo de Las RigidecesDocument22 pagesMetodo de Las Rigidecesrigoberto hernandez perez100% (3)
- Columnas BiaxialesDocument8 pagesColumnas BiaxialesJavier Alarcón100% (2)
- Método Matricial Por RigidezDocument4 pagesMétodo Matricial Por RigidezBrian Andrés Ávila AlzatePas encore d'évaluation
- Guía para el análisis y solución de problemas de resistencia de materialesD'EverandGuía para el análisis y solución de problemas de resistencia de materialesPas encore d'évaluation
- Metodo Matricial 2DDocument9 pagesMetodo Matricial 2DFredd Gòmez Caro100% (1)
- Norma General para La Construccion de Empalmes Monofasicos en Baja TensiónDocument26 pagesNorma General para La Construccion de Empalmes Monofasicos en Baja TensiónRAUL . GACITUA HUERTAPas encore d'évaluation
- RFC RomaDocument3 pagesRFC RomaEsteban GarcíaPas encore d'évaluation
- Método de Riguidez y Ejercicio - FinalDocument25 pagesMétodo de Riguidez y Ejercicio - FinalJhon Deyvi Sanchez TamayPas encore d'évaluation
- Matriz de RigidezDocument18 pagesMatriz de RigidezCristhian Montes100% (1)
- Diseño de Uniones de MaderaDocument33 pagesDiseño de Uniones de MaderaMaria Cecilia Suarez Rubi88% (17)
- Texto Guia de Ingenieria Antisismica PDFDocument254 pagesTexto Guia de Ingenieria Antisismica PDFEd Manz80% (5)
- Metodo Matricial de La RigidezDocument7 pagesMetodo Matricial de La RigidezEstuardo Miguel LuquePas encore d'évaluation
- Evaluación c2 - Marketing AutomationDocument7 pagesEvaluación c2 - Marketing AutomationCaroGonzalezPas encore d'évaluation
- Matriz de RigidezDocument6 pagesMatriz de Rigidezjuan carlosPas encore d'évaluation
- Metodo de La RigidezDocument10 pagesMetodo de La RigidezHectorPas encore d'évaluation
- Análisis Sísmico de EdificiosDocument333 pagesAnálisis Sísmico de EdificiosYGWHPas encore d'évaluation
- Metodo Matricial de Estructuras PorticosDocument5 pagesMetodo Matricial de Estructuras PorticosMarco StructuralPas encore d'évaluation
- Metodo de Elementos Finitos-TrDocument33 pagesMetodo de Elementos Finitos-TrRoberto DavisPas encore d'évaluation
- Evolucion de La Ingenieria CivilDocument31 pagesEvolucion de La Ingenieria CivilBorisFernandoMuchaSosaPas encore d'évaluation
- Gilmer Huaman Mendoza - Tesis: Respuesta Dinamica Por Los Modelos de Calculo de Interaccion Suelo Estructura Del FEMA y Norma E030-2016 Del Edificio de Comando de Control Ribereño - IquitosDocument143 pagesGilmer Huaman Mendoza - Tesis: Respuesta Dinamica Por Los Modelos de Calculo de Interaccion Suelo Estructura Del FEMA y Norma E030-2016 Del Edificio de Comando de Control Ribereño - IquitosGilmer Huamán Mendoza100% (1)
- Folleto 46Document199 pagesFolleto 46pescanova2Pas encore d'évaluation
- Diseño de Columnas BiaxialesDocument17 pagesDiseño de Columnas Biaxialesdiego alejandro garcia vanegas100% (1)
- COLUMNAS Carga AxialDocument16 pagesCOLUMNAS Carga Axialdennys perezPas encore d'évaluation
- Analisis de Portico 3dDocument34 pagesAnalisis de Portico 3dRenzo Bernabe AguilarPas encore d'évaluation
- PushoverDocument68 pagesPushoverEdwin Ramirez100% (2)
- Sesión 02-Estructuración de La Edificación - 2Document17 pagesSesión 02-Estructuración de La Edificación - 2Edson CcahuanaPas encore d'évaluation
- Estudio y Analisis de EstribosDocument10 pagesEstudio y Analisis de EstribosAngelo Raul Zevallos AragonPas encore d'évaluation
- Viga Doblemente ArmadaDocument12 pagesViga Doblemente ArmadaEstefania BlackPas encore d'évaluation
- Sistemas de Varios Grados de Libertad PDFDocument23 pagesSistemas de Varios Grados de Libertad PDFandy zumbaPas encore d'évaluation
- Grados de Libertad FinalDocument16 pagesGrados de Libertad FinalSaussure Fer CcoriPas encore d'évaluation
- Proyecto PrecomprimidoDocument20 pagesProyecto PrecomprimidocarlosrelvasPas encore d'évaluation
- Examen de Análisis No Lineal de EstructurasDocument7 pagesExamen de Análisis No Lineal de EstructurasRekeCheChePas encore d'évaluation
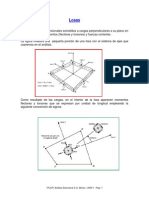
- Analisis de Losas PDFDocument4 pagesAnalisis de Losas PDFJulio LoayzaPas encore d'évaluation
- Adherencia y Anclaje InformeDocument20 pagesAdherencia y Anclaje InformeMichelle Rovayo Reyes100% (1)
- Placas - Viga Con Brazo Rigido y Columna Ancha - Omart Tello PDFDocument24 pagesPlacas - Viga Con Brazo Rigido y Columna Ancha - Omart Tello PDFAndréRafaelVelarde100% (1)
- Metodo de Los Desplazamientos Analisis EstructuralDocument9 pagesMetodo de Los Desplazamientos Analisis EstructuralJose AdansPas encore d'évaluation
- Método Matricial de La RigidezDocument9 pagesMétodo Matricial de La RigidezjhonmoyatPas encore d'évaluation
- Análisis de Estructuras HiperestáticasDocument18 pagesAnálisis de Estructuras HiperestáticasArtuRo HuillcaPas encore d'évaluation
- Metodo Matricial de Rigídez - AnaalisisDocument16 pagesMetodo Matricial de Rigídez - AnaalisisXiomara Suyón HerreraPas encore d'évaluation
- Método de La RigidezDocument2 pagesMétodo de La RigidezWalter Eduardo OtinianoPas encore d'évaluation
- Estructuras Valores y VectoresDocument10 pagesEstructuras Valores y VectoresLuis Alberto CurasiPas encore d'évaluation
- Metodo Matricial de La RigidezDocument10 pagesMetodo Matricial de La RigidezVictor Montero ReformePas encore d'évaluation
- ARMADURASDocument9 pagesARMADURASDIDI ANTONY LEON GOMEZPas encore d'évaluation
- Matriz de RigidezDocument2 pagesMatriz de RigidezAriana Tibisay RichePas encore d'évaluation
- Método de FlexibilidadDocument2 pagesMétodo de Flexibilidadamalia100% (1)
- Analisis Estructural Ii.Document9 pagesAnalisis Estructural Ii.AARONPas encore d'évaluation
- Aplicacion MatricesDocument5 pagesAplicacion MatricesPATRCIAPas encore d'évaluation
- Analisis 2Document11 pagesAnalisis 2Hilary RomeroPas encore d'évaluation
- Trabajo Colavorativo - Analisis Estructural Ii.Document12 pagesTrabajo Colavorativo - Analisis Estructural Ii.AARONPas encore d'évaluation
- Trabajo de Investigacion 2Document13 pagesTrabajo de Investigacion 2irvin esparzaPas encore d'évaluation
- Técnicas MatricialesDocument2 pagesTécnicas Matricialesjose alexander linares herreraPas encore d'évaluation
- Los Métodos de Cálculo MatricialDocument12 pagesLos Métodos de Cálculo MatricialnancitaacostaPas encore d'évaluation
- Análisis Matricial de EstructurasDocument7 pagesAnálisis Matricial de EstructurasCRISTIAN MARINO CORONEL SERVANPas encore d'évaluation
- Trabajo Colavorativo - Analisis Estructural Ii.Document10 pagesTrabajo Colavorativo - Analisis Estructural Ii.AARONPas encore d'évaluation
- Metodos MatricialesDocument17 pagesMetodos MatricialesKir Torres RojasPas encore d'évaluation
- Flexibilidad y RigidezDocument13 pagesFlexibilidad y RigidezErickPas encore d'évaluation
- Marco TeoricoDocument22 pagesMarco TeoricoLilian MorenoPas encore d'évaluation
- Teoría de Método de CrossDocument3 pagesTeoría de Método de CrossActitud4x4offroadPas encore d'évaluation
- Método de Los DesplazamientosDocument8 pagesMétodo de Los DesplazamientosMayke OchoaPas encore d'évaluation
- Covid 19Document7 pagesCovid 19Leidy Angelica MenaPas encore d'évaluation
- Clase #10 Diseño Vivienda - El Hombre y Su HabitatDocument44 pagesClase #10 Diseño Vivienda - El Hombre y Su HabitatLeidy Angelica MenaPas encore d'évaluation
- 3 Estadística MultivarianteDocument18 pages3 Estadística MultivarianteLeidy Angelica MenaPas encore d'évaluation
- Du 097Document3 pagesDu 097Richi LizanaPas encore d'évaluation
- Atlas SolarDocument31 pagesAtlas SolarLav HectorPas encore d'évaluation
- Tuberia S450Document1 pageTuberia S450Leidy Angelica MenaPas encore d'évaluation
- 25.SUB-DREN 0+400 AL 13+731 - 0-Sub Dren 02Document1 page25.SUB-DREN 0+400 AL 13+731 - 0-Sub Dren 02Leidy Angelica MenaPas encore d'évaluation
- Silabo de Taller de TesisDocument36 pagesSilabo de Taller de TesisLeidy Angelica MenaPas encore d'évaluation
- Tabla de Volumen y Carga de TráficoDocument7 pagesTabla de Volumen y Carga de TráficoLeidy Angelica MenaPas encore d'évaluation
- Pre Supuesto Client eDocument1 pagePre Supuesto Client evictorPas encore d'évaluation
- Valorizacion y Liquidacion Obras Publicas Por ContrataDocument34 pagesValorizacion y Liquidacion Obras Publicas Por ContrataHoracio Lance100% (1)
- Análisis de Precios Unitarios: PáginaDocument42 pagesAnálisis de Precios Unitarios: PáginaLeidy Angelica MenaPas encore d'évaluation
- 4.4.1 Climatología y Meteorología Rev 0 PDFDocument18 pages4.4.1 Climatología y Meteorología Rev 0 PDFLeidy Angelica MenaPas encore d'évaluation
- Informe PavimentosDocument13 pagesInforme PavimentosLeidy Angelica MenaPas encore d'évaluation
- Modelizacion de La Accidentalidad Segun El Tipo de Carretera y Su CirculacionDocument424 pagesModelizacion de La Accidentalidad Segun El Tipo de Carretera y Su CirculacionLeidy Angelica MenaPas encore d'évaluation
- ArcoDocument18 pagesArcoMica QuirogaPas encore d'évaluation
- Diseño de TechoDocument18 pagesDiseño de TechoLeidy Angelica MenaPas encore d'évaluation
- Métodos de Diferencias Finitas para Ecuaciones en Derivadas ParcialesDocument41 pagesMétodos de Diferencias Finitas para Ecuaciones en Derivadas Parcialesjuancarora100% (1)
- Teorías de Capacidad de Carga - RRR - FIC - UNASAMDocument18 pagesTeorías de Capacidad de Carga - RRR - FIC - UNASAMLeidy Angelica MenaPas encore d'évaluation
- Diseño Por El Método de La PcaDocument20 pagesDiseño Por El Método de La PcaLeidy Angelica MenaPas encore d'évaluation
- Espejo Alejandro Guia Pmbok Proyecto Presa Relaves-59-89Document31 pagesEspejo Alejandro Guia Pmbok Proyecto Presa Relaves-59-89Leidy Angelica MenaPas encore d'évaluation
- Lista Sugerida de Precios Pavco Enero 2017 PDFDocument36 pagesLista Sugerida de Precios Pavco Enero 2017 PDFAnonymous Mof6oQ889Pas encore d'évaluation
- Desarrollo de La Resistencia Del Concreto en El TiempoDocument43 pagesDesarrollo de La Resistencia Del Concreto en El TiempoLeidy Angelica Mena100% (2)
- Población Por EdadesDocument3 pagesPoblación Por EdadesLeidy Angelica MenaPas encore d'évaluation
- Esp 24 Revoques EnlucidosDocument14 pagesEsp 24 Revoques EnlucidosJotaHilReyPas encore d'évaluation
- CAMINOS II Clases 2013 IIDocument43 pagesCAMINOS II Clases 2013 IILeidy Angelica MenaPas encore d'évaluation
- Análisis de Las ViviendasDocument5 pagesAnálisis de Las ViviendasLeidy Angelica MenaPas encore d'évaluation
- Taller de TesisDocument14 pagesTaller de TesisLeidy Angelica MenaPas encore d'évaluation
- SismologiaDocument45 pagesSismologiaLeidy Angelica MenaPas encore d'évaluation
- Guía #15, Grado Jardin.Document12 pagesGuía #15, Grado Jardin.Mirian BuelvasPas encore d'évaluation
- Instalaciones electricasUNIVERSIDAD ALAS PERUANASDocument6 pagesInstalaciones electricasUNIVERSIDAD ALAS PERUANASIsaac Mericio Cahuana QuispePas encore d'évaluation
- Aprendizajes Esperados Programa 2009 Primaria. Sexto Grado MATEMATICASDocument1 pageAprendizajes Esperados Programa 2009 Primaria. Sexto Grado MATEMATICASDIPLOMADO RIEB ZONA 51100% (3)
- GA6 - 210201501-AA1-EV01 - TallerDocument8 pagesGA6 - 210201501-AA1-EV01 - TallerJulián MantillaPas encore d'évaluation
- AUTORES PEDAGOGIAm KarolDocument16 pagesAUTORES PEDAGOGIAm Karolestefani vegaPas encore d'évaluation
- UntitledDocument226 pagesUntitledKim MPas encore d'évaluation
- Ejemplo SIPOCDocument5 pagesEjemplo SIPOCrobertoPas encore d'évaluation
- El Hijo Del Dragón: Por Profesora McgonagallDocument8 pagesEl Hijo Del Dragón: Por Profesora McgonagallkiupPas encore d'évaluation
- La Teoría CelularDocument10 pagesLa Teoría CelularDayana Moreno BecerraPas encore d'évaluation
- Entre Windows 10 y Win 11Document1 pageEntre Windows 10 y Win 11Jerson CabezasPas encore d'évaluation
- Metodos Cuantitativos FinalDocument80 pagesMetodos Cuantitativos FinalMiguel Angel Oncoy ValverdePas encore d'évaluation
- TMC - Hierro - Grupo 3Document14 pagesTMC - Hierro - Grupo 3Kayla VeraPas encore d'évaluation
- Planificación Objetivos Preparación Física. Escuela de Baloncesto Antonio MachadoDocument4 pagesPlanificación Objetivos Preparación Física. Escuela de Baloncesto Antonio MachadoLeopoldo RuizPas encore d'évaluation
- Tabla de Unidades SIMELADocument2 pagesTabla de Unidades SIMELAfernando benottiPas encore d'évaluation
- MSS Manual VALI EspanolDocument68 pagesMSS Manual VALI EspanolCAMICHILPas encore d'évaluation
- Encapsulamiento Entre Capas Modelo OsiDocument4 pagesEncapsulamiento Entre Capas Modelo OsiKevin CalderónPas encore d'évaluation
- 219champu PDFDocument3 pages219champu PDFJose MoleroPas encore d'évaluation
- Programacion de Obra ActualizadoDocument1 pageProgramacion de Obra ActualizadoDaniel SánchezPas encore d'évaluation
- GAME690126MTCRYL03 AcusePatrimonial2023Document2 pagesGAME690126MTCRYL03 AcusePatrimonial2023TextWG GgPas encore d'évaluation
- Actividad-4 PENSAMIENTO INFANTILDocument11 pagesActividad-4 PENSAMIENTO INFANTILRosa Elvira Mclean ChavezPas encore d'évaluation
- Cuadrados Latinos y GrecolatinosDocument3 pagesCuadrados Latinos y GrecolatinosadeticoPas encore d'évaluation
- 03-Perfiles ComercialesDocument32 pages03-Perfiles ComercialesGuido ZuccarelliPas encore d'évaluation
- Ejercicios Tema 4 Inferencia Estadistica PDFDocument13 pagesEjercicios Tema 4 Inferencia Estadistica PDFArion Yolicar AQPas encore d'évaluation
- Estruc-Import Documentos Adm LayoutDocument8 pagesEstruc-Import Documentos Adm LayoutFernandez De Jesu SPas encore d'évaluation
- Herramientas de MoodleDocument10 pagesHerramientas de MoodleBeti NoceloPas encore d'évaluation
- Parcial GERENCIA ESTRATEGICA #1Document7 pagesParcial GERENCIA ESTRATEGICA #1Angel MiguelPas encore d'évaluation
- El Clima - Docx INTRODocument5 pagesEl Clima - Docx INTROErick Verastegui Olivares100% (1)