Vous aimerez peut-être aussi
- Adobe Scan 28 Mar 2022Document2 pagesAdobe Scan 28 Mar 2022Syed Imtinan AhmedPas encore d'évaluation
- Saturday Shift 1Document2 pagesSaturday Shift 1Syed Imtinan AhmedPas encore d'évaluation
- Single National Circulum Can Unify PakistanDocument3 pagesSingle National Circulum Can Unify PakistanSyed Imtinan AhmedPas encore d'évaluation
- Resume'Document2 pagesResume'Syed Imtinan AhmedPas encore d'évaluation
- Duty Roster W.E.F 19.09.2022Document1 pageDuty Roster W.E.F 19.09.2022Syed Imtinan AhmedPas encore d'évaluation
- Current Afairs 2016Document60 pagesCurrent Afairs 2016Syed Imtinan AhmedPas encore d'évaluation
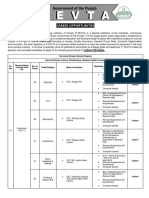
- LHR Tech AdDocument4 pagesLHR Tech AdSyed Imtinan AhmedPas encore d'évaluation
- Request For Bond WaiverDocument2 pagesRequest For Bond WaiverSyed Imtinan Ahmed100% (1)
- Awareness Session On Oct 13, 2022Document1 pageAwareness Session On Oct 13, 2022Syed Imtinan AhmedPas encore d'évaluation
- Types of Carburetors Explained (Under 40Document24 pagesTypes of Carburetors Explained (Under 40Syed Imtinan Ahmed100% (1)
- Metering System VariationDocument15 pagesMetering System VariationSyed Imtinan AhmedPas encore d'évaluation
- MSA Booklet 20190528Document50 pagesMSA Booklet 20190528AndréLuisGarridoPas encore d'évaluation
- Fabozzi Chapter01Document18 pagesFabozzi Chapter01Syed Imtinan AhmedPas encore d'évaluation
- Uniaxial Tensile Test ExplainedDocument5 pagesUniaxial Tensile Test ExplainedSyed Imtinan AhmedPas encore d'évaluation
- Variable Valve Timing Lab ReportDocument14 pagesVariable Valve Timing Lab ReportSyed Imtinan AhmedPas encore d'évaluation
- Scotch Yolk Mechanism Lab Report 2010-ME-206Document7 pagesScotch Yolk Mechanism Lab Report 2010-ME-206Syed Imtinan Ahmed0% (1)
- Islamiat Past Papers 2000-2014Document19 pagesIslamiat Past Papers 2000-2014Syed Imtinan Ahmed100% (2)
- UET Lahore Automotive Cneter Engine Models PSECSDocument13 pagesUET Lahore Automotive Cneter Engine Models PSECSSyed Imtinan AhmedPas encore d'évaluation
- Biogas ProductionDocument7 pagesBiogas ProductionFagbohungbe MichaelPas encore d'évaluation
- Super CapacitorsDocument5 pagesSuper CapacitorsSantu DasPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- S3L2 61SD 3 ZylinderDocument135 pagesS3L2 61SD 3 ZylinderFranck MonnierPas encore d'évaluation
- Estate of Paulina de Garcia - Teresa Garcia vs. Luisa GarciaDocument5 pagesEstate of Paulina de Garcia - Teresa Garcia vs. Luisa Garciaayam dinoPas encore d'évaluation
- Lesson Plan Form CSUDH Teacher Education DepartmentDocument5 pagesLesson Plan Form CSUDH Teacher Education Departmentapi-284817223Pas encore d'évaluation
- June 2006 CAPE Law U1 P2Document4 pagesJune 2006 CAPE Law U1 P2The CaribbeanSpyPas encore d'évaluation
- Future Comparisons: What's Next For Price Comparison Websites?Document18 pagesFuture Comparisons: What's Next For Price Comparison Websites?Filippe OliveiraPas encore d'évaluation
- Christopher Sean Harper Mercer My ManifestoDocument6 pagesChristopher Sean Harper Mercer My ManifestotrenchreynoldsPas encore d'évaluation
- Wright and Wrong - Review of Robert Wright's ''The Moral Animal - Why We Are The Way We Are'' (1995) by Richard LynnDocument3 pagesWright and Wrong - Review of Robert Wright's ''The Moral Animal - Why We Are The Way We Are'' (1995) by Richard Lynnno contractPas encore d'évaluation
- Website: Vce To PDF Converter: Facebook: Twitter:: Nse6 - Fml-6.2.Vceplus - Premium.Exam.30QDocument19 pagesWebsite: Vce To PDF Converter: Facebook: Twitter:: Nse6 - Fml-6.2.Vceplus - Premium.Exam.30QSamuel DiazPas encore d'évaluation
- Boldenone UndDocument2 pagesBoldenone UndAhmedPas encore d'évaluation
- Conflict Case Digest FinalDocument20 pagesConflict Case Digest FinalQuen Rio100% (1)
- CALIMLIM vs. RAMIREZDocument13 pagesCALIMLIM vs. RAMIREZAsHervea AbantePas encore d'évaluation
- Written 1 - No AsnwersDocument7 pagesWritten 1 - No AsnwersMauricio AlvaradoPas encore d'évaluation
- Applications of The Bernoulli EquationDocument13 pagesApplications of The Bernoulli EquationSalim ChohanPas encore d'évaluation
- Be Part of The ESO SupernovaDocument20 pagesBe Part of The ESO SupernovaEuropean Southern ObservatoryPas encore d'évaluation
- Annotated BibliographyDocument5 pagesAnnotated Bibliographyapi-342498870Pas encore d'évaluation
- Teen Stress and PressureDocument5 pagesTeen Stress and Pressurenhat anh nguyenPas encore d'évaluation
- Su2 at Tvws U03Document1 pageSu2 at Tvws U03Julio M CampuzanoPas encore d'évaluation
- Outside MicrometerDocument13 pagesOutside MicrometerSaravana PandiyanPas encore d'évaluation
- Postal Assistant Exam Model Questions and AnswersDocument2 pagesPostal Assistant Exam Model Questions and Answersrajesh kannanPas encore d'évaluation
- Vygotskian Principles On The ZPD and ScaffoldingDocument2 pagesVygotskian Principles On The ZPD and ScaffoldingMerjie A. NunezPas encore d'évaluation
- Pregrad Learning PlanDocument3 pagesPregrad Learning Planapi-314700318Pas encore d'évaluation
- 01549386Document6 pages01549386Pallavi Kr K RPas encore d'évaluation
- Partnership Agreements ReflectionDocument2 pagesPartnership Agreements Reflectionliandra espinosaPas encore d'évaluation
- SAP EHS Regulatory Content Update GuideDocument152 pagesSAP EHS Regulatory Content Update GuidekishorkolhePas encore d'évaluation
- Primes in Tuples I-0508185v1Document36 pagesPrimes in Tuples I-0508185v1Fabiano FerreiraPas encore d'évaluation
- JEE Advanced 39 Years Chapterwise Solved Papers PDFDocument8 pagesJEE Advanced 39 Years Chapterwise Solved Papers PDFSaksham71% (7)
- R2Document4 pagesR2Gercel MillarePas encore d'évaluation
- EvidenceDocument3 pagesEvidenceAdv Nikita SahaPas encore d'évaluation
- NANDOS-Final Strategic MGT ReportDocument57 pagesNANDOS-Final Strategic MGT ReportQamar Bilal Syed73% (11)
- Manitou Telehandler Mlt625 Mlt725 Mlt523 Mlt526 Series 2 Series 3 Turbo Repair ManualDocument22 pagesManitou Telehandler Mlt625 Mlt725 Mlt523 Mlt526 Series 2 Series 3 Turbo Repair Manualscottpeters200189bgr100% (124)