Vous aimerez peut-être aussi
- Poh 2761 02 Faa Rev10 FullDocument1 754 pagesPoh 2761 02 Faa Rev10 FullRobert BellPas encore d'évaluation
- Cessna Sovereign Primus-Epic (Honeywell) - Forward FitDocument6 pagesCessna Sovereign Primus-Epic (Honeywell) - Forward Fitgambit_zeta67% (3)
- CRJ 700 MDC MainDocument202 pagesCRJ 700 MDC MainDarby Morgan100% (3)
- SOP Seneca V Hangar H24Document10 pagesSOP Seneca V Hangar H24danillo100% (1)
- 71-00-00-710-002-B - Wet Motoring CheckDocument8 pages71-00-00-710-002-B - Wet Motoring CheckEder Luciano100% (2)
- Morphing Nose Cone - 2Document10 pagesMorphing Nose Cone - 2Naufal PutraPas encore d'évaluation
- Sub Scale Flight TestingDocument10 pagesSub Scale Flight TestingRajeuv GovindanPas encore d'évaluation
- Research and Application of MAEU UAVsDocument20 pagesResearch and Application of MAEU UAVsThein Than LinPas encore d'évaluation
- Design and Test of A Uav Blended Wing Body Configuration: January 2012Document12 pagesDesign and Test of A Uav Blended Wing Body Configuration: January 2012BALAJI MUNISAMYPas encore d'évaluation
- Considerations About Winglet DesignDocument10 pagesConsiderations About Winglet DesignBrian Xistos100% (1)
- Ijcr 2432Document23 pagesIjcr 2432redhouane2014Pas encore d'évaluation
- URBAN_DESIGN_151_REVIEWDocument2 pagesURBAN_DESIGN_151_REVIEWChantriaPas encore d'évaluation
- The Development and Testing of A Full-Scale Piloted OrnithopterDocument11 pagesThe Development and Testing of A Full-Scale Piloted OrnithopterOlasco OmoolaPas encore d'évaluation
- Design of Low Altitude Long Endurance Solar-Powered UAV Using Genetic AlgorithmDocument24 pagesDesign of Low Altitude Long Endurance Solar-Powered UAV Using Genetic Algorithm이재국Pas encore d'évaluation
- 1 s2.0 S1270963813000771 Main PDFDocument12 pages1 s2.0 S1270963813000771 Main PDFAwan AJaPas encore d'évaluation
- Lehmkuehler_AndersonDocument9 pagesLehmkuehler_Andersoneno emoPas encore d'évaluation
- Conceptual Sizing of Next Supersonic Passenger Aircraft From RegressionDocument8 pagesConceptual Sizing of Next Supersonic Passenger Aircraft From RegressionAlessandro CastelvetriPas encore d'évaluation
- Concept Design For An UAVDocument5 pagesConcept Design For An UAVPedro Tati BarrosPas encore d'évaluation
- Design and Fabrication of Unmanned Arial Vehicle For Multi-Mission TasksDocument10 pagesDesign and Fabrication of Unmanned Arial Vehicle For Multi-Mission TasksTJPRC PublicationsPas encore d'évaluation
- Design, Implementation and Verification of A Quadrotor Tail-Sitter VTOL UAVDocument10 pagesDesign, Implementation and Verification of A Quadrotor Tail-Sitter VTOL UAVPedro Cezar Rodrigues BaltazarPas encore d'évaluation
- Wind Tunnel FinalDocument20 pagesWind Tunnel FinalnccedenoPas encore d'évaluation
- Aerodynamic Analysis of Variable Cant Angle Winglets For Improved Aircraft PerformanceDocument7 pagesAerodynamic Analysis of Variable Cant Angle Winglets For Improved Aircraft Performancelado prakasaPas encore d'évaluation
- A Fly-By-Wireless UAV Platform Based On A Flexible and Distributed System ArchitectureDocument6 pagesA Fly-By-Wireless UAV Platform Based On A Flexible and Distributed System ArchitecturePaulPas encore d'évaluation
- Development of A Crashworthy Composite Fuselage Structure For A Commuter AircraftDocument23 pagesDevelopment of A Crashworthy Composite Fuselage Structure For A Commuter AircraftJony M. TemnikarPas encore d'évaluation
- Aero 7sem Ae2404lmDocument35 pagesAero 7sem Ae2404lmUNsha bee komPas encore d'évaluation
- Morphing Wing Flaps For Large Civil AircraftDocument16 pagesMorphing Wing Flaps For Large Civil Aircraftshixian guoPas encore d'évaluation
- Induce Drag Reduction of An Airplane WingDocument5 pagesInduce Drag Reduction of An Airplane WingAJER JOURNALPas encore d'évaluation
- Literature ReviewDocument3 pagesLiterature Reviewfradow mudendaPas encore d'évaluation
- Review of Morphing Aircraft TechnologiesDocument55 pagesReview of Morphing Aircraft TechnologiesJack AzadPas encore d'évaluation
- Design and Analysis of A Wing With Foldable Winglet Using Morphing TechnologyDocument11 pagesDesign and Analysis of A Wing With Foldable Winglet Using Morphing TechnologySubash DhakalPas encore d'évaluation
- AeroPac 2012 100k' Program Report - CompressedDocument100 pagesAeroPac 2012 100k' Program Report - Compressedjdemula100% (1)
- Final Draft JoA Multi ComponentDocument33 pagesFinal Draft JoA Multi ComponentAhmad Nurwahid View MotivatorPas encore d'évaluation
- 1 s2.0 S1270963813000771 MainDocument13 pages1 s2.0 S1270963813000771 MainSidi Moulaye SidnePas encore d'évaluation
- Development of A Morphing Ap Using Shape Memory Alloy Actuators: The Aerodynamic Characteristics of A Morphing ApDocument23 pagesDevelopment of A Morphing Ap Using Shape Memory Alloy Actuators: The Aerodynamic Characteristics of A Morphing Apmed turkiPas encore d'évaluation
- Simulated Pilot-In-The-Loop Testing of Handling Qualities of The Flexible Wing AircraftDocument9 pagesSimulated Pilot-In-The-Loop Testing of Handling Qualities of The Flexible Wing AircraftLucas GalembeckPas encore d'évaluation
- Ahmet Sanjeev 2016Document17 pagesAhmet Sanjeev 2016rohitPas encore d'évaluation
- CFD-02 Winglet CFD Analysis KCTDocument12 pagesCFD-02 Winglet CFD Analysis KCTaeroswethaPas encore d'évaluation
- Aiaa 2010 4224 PDFDocument14 pagesAiaa 2010 4224 PDFMohamed MansourPas encore d'évaluation
- Catapult HesablamaDocument13 pagesCatapult HesablamaSamir HaciyevPas encore d'évaluation
- Nasa Wing ShapingDocument38 pagesNasa Wing ShapingBurak ÇınarPas encore d'évaluation
- Applsci 09 03043Document24 pagesApplsci 09 03043Lennin Stalyn BallínPas encore d'évaluation
- Journal Pre-Proofs: Manufacturing LettersDocument12 pagesJournal Pre-Proofs: Manufacturing LettersAhmed ismailPas encore d'évaluation
- Heavy Business Jet Design ProjectDocument56 pagesHeavy Business Jet Design ProjectJackson JackPas encore d'évaluation
- The Lift-Fan Aircraft - Lessons LearnedDocument70 pagesThe Lift-Fan Aircraft - Lessons LearnedAndrew Whipple100% (1)
- Methods For Conceptual Flight Control System DesignDocument19 pagesMethods For Conceptual Flight Control System DesigndpnairPas encore d'évaluation
- Conceptual Design of Hybrid UAVDocument10 pagesConceptual Design of Hybrid UAVDreamer MakerPas encore d'évaluation
- Co-Flow Jet (CFJ) Airfoils Practicality in Engineless AirplanesDocument25 pagesCo-Flow Jet (CFJ) Airfoils Practicality in Engineless Airplanesinam vfPas encore d'évaluation
- About NALDocument16 pagesAbout NALSandesh Kumar B VPas encore d'évaluation
- Aerodynamic Optimization of The Angle of Attack ofDocument6 pagesAerodynamic Optimization of The Angle of Attack ofDavid AzadPas encore d'évaluation
- Design and Construction of A Novel QuadDocument23 pagesDesign and Construction of A Novel QuadAbdul Haseeb ShahPas encore d'évaluation
- Fixed Wing Modular UAV Preliminary Structural DesignDocument15 pagesFixed Wing Modular UAV Preliminary Structural DesignHARISH PPas encore d'évaluation
- Design, Manufacturing, and Flight Testing of An Experimental Flying Wing UAVDocument22 pagesDesign, Manufacturing, and Flight Testing of An Experimental Flying Wing UAVPetraKrhačPas encore d'évaluation
- Aircraft Project 15 Passenger Business JetDocument50 pagesAircraft Project 15 Passenger Business Jetprakulmittal2Pas encore d'évaluation
- CADD 222 Finals Module No. 07Document9 pagesCADD 222 Finals Module No. 07ralph trasmanasPas encore d'évaluation
- Design and Aerodynamic Optimization of A Tri-Tilt RotorDocument22 pagesDesign and Aerodynamic Optimization of A Tri-Tilt RotorSourav SangamPas encore d'évaluation
- A Design Method For Supersonic Transport WingsDocument11 pagesA Design Method For Supersonic Transport Wings李子木Pas encore d'évaluation
- IJUSEng AerialPhotographyDocument10 pagesIJUSEng AerialPhotographyTawfiqur RahmanPas encore d'évaluation
- Development of Unmanned Robotic Vehicles Based On Teh Three-Wing Planform TechnologyDocument11 pagesDevelopment of Unmanned Robotic Vehicles Based On Teh Three-Wing Planform TechnologyHelder Anibal HerminiPas encore d'évaluation
- Bio-Inspired Flapping UAV Design: A University PerspectiveDocument13 pagesBio-Inspired Flapping UAV Design: A University PerspectiveNourhan FathyPas encore d'évaluation
- Artificial Intelligence Vehicle: Fundamentals and ApplicationsD'EverandArtificial Intelligence Vehicle: Fundamentals and ApplicationsPas encore d'évaluation
- Autonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesD'EverandAutonomous Flying Robots: Unmanned Aerial Vehicles and Micro Aerial VehiclesPas encore d'évaluation
- Modern Flexible Multi-Body Dynamics Modeling Methodology for Flapping Wing VehiclesD'EverandModern Flexible Multi-Body Dynamics Modeling Methodology for Flapping Wing VehiclesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mechatronics UavDocument14 pagesMechatronics UavMahmoud Abdul Wahab MahmoudPas encore d'évaluation
- Hal2007 05Document125 pagesHal2007 05Edy JJPas encore d'évaluation
- 0408 PDFDocument258 pages0408 PDFRisgam PutraPas encore d'évaluation
- Autonomous Vehicle Technology For Small UAVDocument17 pagesAutonomous Vehicle Technology For Small UAVSakthivel ArumugamPas encore d'évaluation
- Hal2007 05Document125 pagesHal2007 05Edy JJPas encore d'évaluation
- Aircraft Gas Turbine Engine Vibration DiagnosticDocument5 pagesAircraft Gas Turbine Engine Vibration DiagnosticfazzliePas encore d'évaluation
- NASA Facts CENTURION Reaching The New Century On Solar PowerDocument4 pagesNASA Facts CENTURION Reaching The New Century On Solar PowerBob AndrepontPas encore d'évaluation
- CAR 21 Presentation 20 Jun 2011Document63 pagesCAR 21 Presentation 20 Jun 2011mauryapiaePas encore d'évaluation
- Effect of Weight On Stall SpeedDocument2 pagesEffect of Weight On Stall Speedpp2076Pas encore d'évaluation
- Cyclo RotorDocument5 pagesCyclo RotorInstagramPas encore d'évaluation
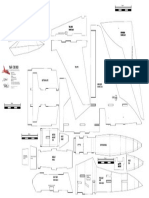
- Yak-130 MJ 5-inch model plane assembly guideDocument1 pageYak-130 MJ 5-inch model plane assembly guideHuascar CandiaPas encore d'évaluation
- Vory/Rja Rajahmundry, India: .Eff.25.AprDocument4 pagesVory/Rja Rajahmundry, India: .Eff.25.Aprmehul da aviatorPas encore d'évaluation
- Avidyne Retail Price List: Effective March, 2011Document2 pagesAvidyne Retail Price List: Effective March, 2011appanna_Pas encore d'évaluation
- Oswego County promotes air traffic safety ahead of solar eclipse April 8Document1 pageOswego County promotes air traffic safety ahead of solar eclipse April 8NewzjunkyPas encore d'évaluation
- Redelivery Considerations in Aircraft Operating Leases v1Document39 pagesRedelivery Considerations in Aircraft Operating Leases v1msm100% (1)
- A Brief History of FlightDocument27 pagesA Brief History of FlightSuyog AbnavePas encore d'évaluation
- ALS-SIM Flanker ManualDocument21 pagesALS-SIM Flanker Manualpperic13Pas encore d'évaluation
- Aircraft specifications and dimensionsDocument4 pagesAircraft specifications and dimensionsMario VolpattiPas encore d'évaluation
- Section 9 Emergency Procedures: Aircraft EmergenciesDocument18 pagesSection 9 Emergency Procedures: Aircraft Emergencieseliasox123Pas encore d'évaluation
- Air Traffic Situational Awareness - ATSAW: Flight Operations Support & ServicesDocument34 pagesAir Traffic Situational Awareness - ATSAW: Flight Operations Support & ServicesBilly CostaPas encore d'évaluation
- Civil Helicopter Handbook 07-08Document18 pagesCivil Helicopter Handbook 07-08Nuno Rodrigues0% (1)
- 767 Work Book - TrainingDocument165 pages767 Work Book - TrainingKoldo Navarro100% (1)
- BUYING AN AIRPLANE? KEY FACTORS WHEN SELECTING A HOMEBUILT, CLASSIC, OR EXPERIMENTAL AIRCRAFTDocument5 pagesBUYING AN AIRPLANE? KEY FACTORS WHEN SELECTING A HOMEBUILT, CLASSIC, OR EXPERIMENTAL AIRCRAFTYvessPas encore d'évaluation
- Sistema Efis PDFDocument158 pagesSistema Efis PDFBoeing 747Pas encore d'évaluation
- PT6A Electrical Discharge DamageDocument4 pagesPT6A Electrical Discharge DamageFran GaritaPas encore d'évaluation
- Chap - 11 Emergency Response Planning (ERP) PDFDocument9 pagesChap - 11 Emergency Response Planning (ERP) PDFMarcelo NobregaPas encore d'évaluation
- md500 Saf 2017 09Document8 pagesmd500 Saf 2017 09api-539472346Pas encore d'évaluation
- Assignment EisDocument4 pagesAssignment Eismohammad ashrafPas encore d'évaluation
- Aviation News - December 2015Document84 pagesAviation News - December 2015serge.pungwePas encore d'évaluation
- Myanmar Air Force 05 Feb 2013Document12 pagesMyanmar Air Force 05 Feb 2013shahidac100% (2)