Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- CARESTREAM DRX-1 System Detector CARESTREAM DRX-1C System Detector CARESTREAM DRX 2530C Detector Model DRX 2530-01 User GuideDocument37 pagesCARESTREAM DRX-1 System Detector CARESTREAM DRX-1C System Detector CARESTREAM DRX 2530C Detector Model DRX 2530-01 User GuideTony KututoPas encore d'évaluation
- PTS 13.42.01 PDFDocument20 pagesPTS 13.42.01 PDFNaufal Daumi100% (1)
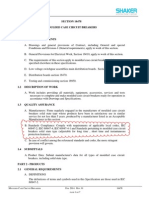
- Molded Case Circuit Breakers PDFDocument7 pagesMolded Case Circuit Breakers PDFMohamedAhmedFawzyPas encore d'évaluation
- EDS 06-0013 Grid and Primary Substation Earthing Design PDFDocument59 pagesEDS 06-0013 Grid and Primary Substation Earthing Design PDFRajendra Prasad ShuklaPas encore d'évaluation
- Fault Detection ClassificationDocument210 pagesFault Detection ClassificationAnonymous GRb9L95LwzPas encore d'évaluation
- Main Switchboard Maintenance PDFDocument17 pagesMain Switchboard Maintenance PDFAzman HanafiahPas encore d'évaluation
- Chapter 17 The Telephone Circuit Tomasi Review PDFDocument9 pagesChapter 17 The Telephone Circuit Tomasi Review PDFashwiniPas encore d'évaluation
- Assignment 10: Unit 13 - Week 10Document4 pagesAssignment 10: Unit 13 - Week 10Anjali YadavPas encore d'évaluation
- Nri Institute of Technology: Q.No - Roll No'sDocument2 pagesNri Institute of Technology: Q.No - Roll No'sDr. P. Rama Koteswara RaoPas encore d'évaluation
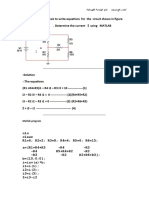
- R1 6Ω R4 4Ω R5 6Ω V1 10 VDocument63 pagesR1 6Ω R4 4Ω R5 6Ω V1 10 Vď èPas encore d'évaluation
- T007 TestingDocument4 pagesT007 TestingEmanuel Nicolas VillarruelPas encore d'évaluation
- OLRDocument3 pagesOLRMazhar SaqlainPas encore d'évaluation
- Soliphant T FTM20, FTM21: Technical Information VibronicDocument16 pagesSoliphant T FTM20, FTM21: Technical Information VibronicmichaelPas encore d'évaluation
- 74HC HCTDocument28 pages74HC HCTEduardo ParadaPas encore d'évaluation
- What Is RSSIDocument1 pageWhat Is RSSIAgus AAAPas encore d'évaluation
- White Paper On Lithium Smoke DetectionDocument22 pagesWhite Paper On Lithium Smoke DetectionJaokPas encore d'évaluation
- ULN2001, ULN2002 ULN2003, ULN2004: DescriptionDocument17 pagesULN2001, ULN2002 ULN2003, ULN2004: DescriptionAlberto CorralesPas encore d'évaluation
- 240z Alternator UpgradeDocument7 pages240z Alternator UpgradeJose Angel RodriguezPas encore d'évaluation
- 141 27 ComparativeDocument9 pages141 27 ComparativeAayush GuptaPas encore d'évaluation
- DDE 1313 Digital Electronics 1 LODocument6 pagesDDE 1313 Digital Electronics 1 LOAhmad FadzlyPas encore d'évaluation
- Hardware Manual Drive Module Trolley For ACS800-04, ACS800-U4, ACS800-04M With Option +H354 and ACS800-07Document16 pagesHardware Manual Drive Module Trolley For ACS800-04, ACS800-U4, ACS800-04M With Option +H354 and ACS800-07Dmitriy SokolPas encore d'évaluation
- High Voltage CoilsDocument20 pagesHigh Voltage CoilsMarco SussuaranaPas encore d'évaluation
- Design For Efficiency Optimization and Voltage Controllability of Series-Series Compensated Inductive Power Transfer SystemsDocument10 pagesDesign For Efficiency Optimization and Voltage Controllability of Series-Series Compensated Inductive Power Transfer SystemsPatil MounicareddyPas encore d'évaluation
- Solar Powered Smart Bag: March 2018Document4 pagesSolar Powered Smart Bag: March 2018Baby CutiessPas encore d'évaluation
- Padmapat Engineers Pvt. Ltd.Document23 pagesPadmapat Engineers Pvt. Ltd.Padmapat EngineerPas encore d'évaluation
- Ec 6011Document8 pagesEc 6011Karthikeyan_Go_9525Pas encore d'évaluation
- DTR100Document56 pagesDTR100SUNYAOZONGPas encore d'évaluation
- 103 QStart Flatpack2 PSSyst PDFDocument32 pages103 QStart Flatpack2 PSSyst PDFfar333Pas encore d'évaluation
- Sensor Tekanan SKU237545Document1 pageSensor Tekanan SKU237545Apra PashterPas encore d'évaluation