Vous aimerez peut-être aussi
- Vit Bhopal University: What Are Important Components of MATLAB?Document6 pagesVit Bhopal University: What Are Important Components of MATLAB?Raju ShanmugamPas encore d'évaluation
- Final PPT of Night VisionDocument35 pagesFinal PPT of Night VisionPradeepdarshan Pradeep70% (10)
- An Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlDocument5 pagesAn Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlArif AfifPas encore d'évaluation
- Sinusoidal Synthesis of Speech Using MATLABDocument35 pagesSinusoidal Synthesis of Speech Using MATLABAkshay JainPas encore d'évaluation
- 2 DOF Helicopter Lab ManualDocument32 pages2 DOF Helicopter Lab ManualNixon Andres Alvarez BarreraPas encore d'évaluation
- Fault Detection ClassificationDocument210 pagesFault Detection ClassificationAnonymous GRb9L95LwzPas encore d'évaluation
- Support Vector RegressionDocument15 pagesSupport Vector RegressionNastaran MoosaviPas encore d'évaluation
- Night Vision Technology ReportDocument21 pagesNight Vision Technology ReportPradeepdarshan Pradeep100% (3)
- Week6 Matlab Fuzzy ExamplesDocument17 pagesWeek6 Matlab Fuzzy Examplesmekatronik_05Pas encore d'évaluation
- Decision Support Model For Prioritizing Railway Level Crossings For Safety Improvements in Serbia: Application of Adaptive Neuro-Fuzzy SystemDocument16 pagesDecision Support Model For Prioritizing Railway Level Crossings For Safety Improvements in Serbia: Application of Adaptive Neuro-Fuzzy SystemDragan PamučarPas encore d'évaluation
- Sample Power CurvesDocument15 pagesSample Power CurvesNasyith Hananur RohiemPas encore d'évaluation
- Anfis NoteDocument15 pagesAnfis NoteNimoPas encore d'évaluation
- Free Vibration and Modal Analysis of Tower Crane Using SAP2000 and ANSYS PDFDocument10 pagesFree Vibration and Modal Analysis of Tower Crane Using SAP2000 and ANSYS PDFİsmailPas encore d'évaluation
- SM PsiiiDocument57 pagesSM PsiiiSv Ko100% (1)
- Bz5xn Multiphysics Anfd Multiscale Modeling Techniques and ApplicationsDocument419 pagesBz5xn Multiphysics Anfd Multiscale Modeling Techniques and ApplicationsGeorgie VegaPas encore d'évaluation
- Chapter 2 System Approach To CBM-PHMDocument22 pagesChapter 2 System Approach To CBM-PHMDioPas encore d'évaluation
- 2004 Book ModelOrderReductionTechniques PDFDocument379 pages2004 Book ModelOrderReductionTechniques PDFshowbhutPas encore d'évaluation
- Basic Approach of 61400 - 25Document21 pagesBasic Approach of 61400 - 25Sam Devid Jero DuraisamyPas encore d'évaluation
- Static Timing AnalysisDocument9 pagesStatic Timing AnalysisPradeepdarshan PradeepPas encore d'évaluation
- M2016-Scientific Computing With MATLAB-Paul Gribble-Math Eng Chap01 G Chap02Document114 pagesM2016-Scientific Computing With MATLAB-Paul Gribble-Math Eng Chap01 G Chap02hieuhuechPas encore d'évaluation
- Mechanics of Machines IntroDocument48 pagesMechanics of Machines IntroYuvraj Singh100% (1)
- Advanced Condition MonitoringDocument4 pagesAdvanced Condition MonitoringmruizbarriosPas encore d'évaluation
- Analysis of Non Newtonian FluidDocument25 pagesAnalysis of Non Newtonian FluidManakhJyotiPhukanPas encore d'évaluation
- Reduced Order Modelling For Flow Control (Edited by BERND R. NOACK, MAREK MORZYNSKI, GILEAD TADMOR)Document340 pagesReduced Order Modelling For Flow Control (Edited by BERND R. NOACK, MAREK MORZYNSKI, GILEAD TADMOR)Jawad KhawarPas encore d'évaluation
- Submitted by - ABHISHEK RANJAN Reg No.-080921316Document32 pagesSubmitted by - ABHISHEK RANJAN Reg No.-080921316Abhishek RanjanPas encore d'évaluation
- Presentation On Model Order ReductionDocument26 pagesPresentation On Model Order ReductionlubnaPas encore d'évaluation
- Lecture13 ANFISDocument43 pagesLecture13 ANFISWilldan Aprizal ArifinPas encore d'évaluation
- Art:10.1007/s00170 013 5065 ZDocument15 pagesArt:10.1007/s00170 013 5065 ZPradeep KunduPas encore d'évaluation
- Analytic Prognostic For Petrochemical PiDocument11 pagesAnalytic Prognostic For Petrochemical PiFrancesco TedescoPas encore d'évaluation
- Introduction To MBSD - NotesDocument783 pagesIntroduction To MBSD - NotesmuradbashirPas encore d'évaluation
- 1441957561Document356 pages1441957561Guilherme Augusto CecatoPas encore d'évaluation
- Lecture 3Document14 pagesLecture 3Benedicto MugongoPas encore d'évaluation
- MATLAB Tutorial PDFDocument101 pagesMATLAB Tutorial PDFmuhammadmusakhanPas encore d'évaluation
- Deep Learning Enabled Fault DiagnosisDocument18 pagesDeep Learning Enabled Fault DiagnosisNicolas Iturrieta BerriosPas encore d'évaluation
- RKB Bearing FEA AnalysisDocument16 pagesRKB Bearing FEA AnalysisYan KhaiPas encore d'évaluation
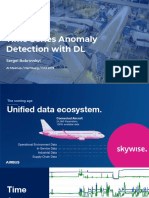
- Time Series Anomaly Detection With DLDocument18 pagesTime Series Anomaly Detection With DLAnonymous 9tJYscsPas encore d'évaluation
- Wavelet TransformDocument27 pagesWavelet TransformMuhammad Salman100% (1)
- 6201-2Z - SKF Deep Groove Ball Bearing 6201-2Z 12mm I.D, 32mm ODocument2 pages6201-2Z - SKF Deep Groove Ball Bearing 6201-2Z 12mm I.D, 32mm Oyushveer002Pas encore d'évaluation
- Analysis and Parameter Estimation of Li-Ion Batteries, Simulations For Electric VehiclesDocument8 pagesAnalysis and Parameter Estimation of Li-Ion Batteries, Simulations For Electric VehiclesCostache CatalinPas encore d'évaluation
- AP01037 New Mechanical and Robotic Harvesting Technologies To Increase Fruit Production EfficiencyDocument48 pagesAP01037 New Mechanical and Robotic Harvesting Technologies To Increase Fruit Production EfficiencyerdemsecenPas encore d'évaluation
- 2012 Journal RIAC Web - 2Document36 pages2012 Journal RIAC Web - 2salaprove5157Pas encore d'évaluation
- Nptel: Sensing & ActuationDocument125 pagesNptel: Sensing & ActuationPranav RajPas encore d'évaluation
- Mechanics of MachinesDocument4 pagesMechanics of MachinesKabir Bashir Shariff100% (1)
- Mechanics of Fluids: Introduction To Fluid MechanicsDocument46 pagesMechanics of Fluids: Introduction To Fluid Mechanicsearl pannilaPas encore d'évaluation
- Modeling and Simulation of Dynamic SystemsDocument1 pageModeling and Simulation of Dynamic SystemsGyan Pratap SinghPas encore d'évaluation
- Shigeaki Sakurai-Theory and Applications For Advanced Text Mining-InTech (2012)Document226 pagesShigeaki Sakurai-Theory and Applications For Advanced Text Mining-InTech (2012)Camila BastosPas encore d'évaluation
- 3 Matlab AnfisDocument28 pages3 Matlab AnfisThiru Mal JPas encore d'évaluation
- Smart Grid ReportDocument13 pagesSmart Grid ReportAlankrit SharmaPas encore d'évaluation
- ICEF 2020 Keynote Prith BanerjeeDocument23 pagesICEF 2020 Keynote Prith BanerjeeSai Santhosh ManepallyPas encore d'évaluation
- DMDW Full PDFDocument784 pagesDMDW Full PDFIrimescu AndreiPas encore d'évaluation
- Signal Analysis Using MATLABDocument8 pagesSignal Analysis Using MATLABRajiv ShahPas encore d'évaluation
- Power Quality Improvement in Grid Connected PV SystemDocument6 pagesPower Quality Improvement in Grid Connected PV SystemEditor IJTSRDPas encore d'évaluation
- 01 Modelling and SimulationDocument18 pages01 Modelling and SimulationMuslihPas encore d'évaluation
- Motor Condition MonitorDocument25 pagesMotor Condition MonitorVirgilioPas encore d'évaluation
- Applied Thermodynamics QBDocument12 pagesApplied Thermodynamics QBapi-25999517100% (1)
- Comparative Analysis of Optimizers in Deep Neural NetworksDocument4 pagesComparative Analysis of Optimizers in Deep Neural NetworksInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Mathematical Model of The PMSG Based On Wind Energy Conversion SystemDocument7 pagesMathematical Model of The PMSG Based On Wind Energy Conversion SystemIRJIEPas encore d'évaluation
- 10.1007/978 1 4020 9438 5Document380 pages10.1007/978 1 4020 9438 5foamtrailerPas encore d'évaluation
- Modeling and Simulation of Wind TurbinesDocument128 pagesModeling and Simulation of Wind TurbinesDaniel_Gar_Wah_HoPas encore d'évaluation
- 9-Construction Management - Optimizing Resource ScheduleDocument46 pages9-Construction Management - Optimizing Resource Scheduleمحمد بركات0% (1)
- Deep Learning For Image Processing Using MATLABDocument19 pagesDeep Learning For Image Processing Using MATLABNetaji GandiPas encore d'évaluation
- Yesid 2017Document12 pagesYesid 2017Carlos Humberto LlanosPas encore d'évaluation
- Model-Based Design Automation of Hard-Ware/Software Co-Designs For Xilinx Zynq PsocsDocument8 pagesModel-Based Design Automation of Hard-Ware/Software Co-Designs For Xilinx Zynq PsocsMouna elamariPas encore d'évaluation
- 00 Paper 24 - Melkamzer AsefaDocument23 pages00 Paper 24 - Melkamzer AsefamelkamzerPas encore d'évaluation
- MSP430 Quick ReferenceDocument2 pagesMSP430 Quick Referenceetome05Pas encore d'évaluation
- A Brief History of Real Time Embedded SystemDocument27 pagesA Brief History of Real Time Embedded SystemPradeepdarshan PradeepPas encore d'évaluation
- Design For Vlsi SystemsDocument36 pagesDesign For Vlsi SystemsPradeepdarshan PradeepPas encore d'évaluation
- MSP 430 (Mixed Signal Processor)Document64 pagesMSP 430 (Mixed Signal Processor)Pradeepdarshan PradeepPas encore d'évaluation
- Analog Lab Mannual (Copy)Document95 pagesAnalog Lab Mannual (Copy)Pradeepdarshan PradeepPas encore d'évaluation
- Final Image Compression Based FuzzyDocument52 pagesFinal Image Compression Based FuzzyPradeepdarshan PradeepPas encore d'évaluation
- Image Compression Using FuzzyDocument5 pagesImage Compression Using FuzzyPradeepdarshan Pradeep100% (1)
- Design and Implementation of Square and Cube Using Vedic MultiplierDocument20 pagesDesign and Implementation of Square and Cube Using Vedic MultiplierPradeepdarshan Pradeep100% (1)
- Design and Implementation of Square and Cube Using Vedic MultiplierDocument15 pagesDesign and Implementation of Square and Cube Using Vedic MultiplierPradeepdarshan PradeepPas encore d'évaluation
- Design and Implementation of Square and Cube Using Vedic MultiplierDocument1 pageDesign and Implementation of Square and Cube Using Vedic MultiplierPradeepdarshan PradeepPas encore d'évaluation
- Design and Implementation of Square and Cube Using Vedic MultiplierDocument10 pagesDesign and Implementation of Square and Cube Using Vedic MultiplierPradeepdarshan PradeepPas encore d'évaluation
- Design and Implementation of Square and Cube Using Vedic MultiplierDocument1 pageDesign and Implementation of Square and Cube Using Vedic MultiplierPradeepdarshan PradeepPas encore d'évaluation
- Class 6 - Cortex-M3 Exceptions ProgrammingDocument9 pagesClass 6 - Cortex-M3 Exceptions ProgrammingPradeepdarshan PradeepPas encore d'évaluation
- DMVLSIDocument15 pagesDMVLSIPradeepdarshan PradeepPas encore d'évaluation
- 10 1 1 106Document10 pages10 1 1 106Pradeepdarshan PradeepPas encore d'évaluation
- Implementation of ConvolutionDocument3 pagesImplementation of ConvolutionPradeepdarshan PradeepPas encore d'évaluation
- Pradeep S: Career ObjectiveDocument2 pagesPradeep S: Career ObjectivePradeepdarshan PradeepPas encore d'évaluation
- Synopsis On Vedic MultiplerDocument10 pagesSynopsis On Vedic MultiplerPradeepdarshan PradeepPas encore d'évaluation
- Specification Customer: Module No.: WG240128B-FMI-VZ#: (For Customer Use Only) PCB Version: DataDocument46 pagesSpecification Customer: Module No.: WG240128B-FMI-VZ#: (For Customer Use Only) PCB Version: DatauserPas encore d'évaluation
- Full-Wave Center-Tapped Rectifier: ObjectivesDocument3 pagesFull-Wave Center-Tapped Rectifier: ObjectivesShannen Joyce FloresPas encore d'évaluation
- LM 317Document31 pagesLM 317Ramiro MezaPas encore d'évaluation
- IES CONV Electrical Engineering 2006Document12 pagesIES CONV Electrical Engineering 2006jitenPas encore d'évaluation
- 686 INVICTA-HP Probook 4510s 4710s PDFDocument54 pages686 INVICTA-HP Probook 4510s 4710s PDFmaxslancasterPas encore d'évaluation
- Service Manual: FM Stereo, Fm/Am Superheterodyne TunerDocument36 pagesService Manual: FM Stereo, Fm/Am Superheterodyne TunerSalvador Galvan RiveraPas encore d'évaluation
- Equipos Pruebas VLF Marca High Voltage (English)Document2 pagesEquipos Pruebas VLF Marca High Voltage (English)ValentinaPas encore d'évaluation
- A Complete Guide To Sim CloninDocument9 pagesA Complete Guide To Sim CloninPriyanka BhujbalPas encore d'évaluation
- Backend VlsiDocument5 pagesBackend VlsiRatnakarVarunPas encore d'évaluation
- SNA43QX0ZSADocument31 pagesSNA43QX0ZSASunil MalikPas encore d'évaluation
- GPS Interface - Interfacing GPS With AVR Microcontroller (Atmega16)Document13 pagesGPS Interface - Interfacing GPS With AVR Microcontroller (Atmega16)Chittaranjan BaralPas encore d'évaluation
- TIs Medical Technology JournalDocument34 pagesTIs Medical Technology JournalFawadPas encore d'évaluation
- Testlink GlossaryDocument5 pagesTestlink GlossaryJitesh VaghelaPas encore d'évaluation
- Switching Theory and Logic DesignDocument2 pagesSwitching Theory and Logic DesignManjunath BadigerPas encore d'évaluation
- Philips FW C255 PDFDocument52 pagesPhilips FW C255 PDFSergioPas encore d'évaluation
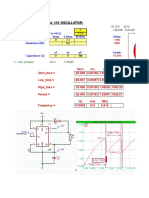
- 555 OscillatorsDocument6 pages555 OscillatorsNelson Naval CabingasPas encore d'évaluation
- Basic ElectricalDocument4 pagesBasic ElectricalL.ABHISHEK KUMARPas encore d'évaluation
- Str-A6251M: Universal-Input/15 W 67 KHZ Flyback Switching RegulatorDocument7 pagesStr-A6251M: Universal-Input/15 W 67 KHZ Flyback Switching RegulatorAlexisPas encore d'évaluation
- Service Manual: Cmt-Cq1Document54 pagesService Manual: Cmt-Cq1Anonymous Lfgk6vygPas encore d'évaluation
- Iii I Lica BitsDocument15 pagesIii I Lica BitsRevanthkumar100% (1)
- Good PDSPDocument39 pagesGood PDSPJ HARSHA YADAVPas encore d'évaluation
- Quanta Ne7 Uma R3a Schematics PDFDocument37 pagesQuanta Ne7 Uma R3a Schematics PDFJosué GarciaPas encore d'évaluation
- Datasheet Flatpack2 110-125V RectifiersDocument3 pagesDatasheet Flatpack2 110-125V RectifiersCarlos SalazarPas encore d'évaluation
- Electronics EngineeringDocument3 pagesElectronics EngineeringmailforpriyanshuPas encore d'évaluation
- LIS331DLH DatasheetDocument38 pagesLIS331DLH DatasheetSergio GonzalezPas encore d'évaluation
- ECE121: Electronics (1) : Lecture 2: Diode Clipping and Calmping CircuitsDocument22 pagesECE121: Electronics (1) : Lecture 2: Diode Clipping and Calmping CircuitsSamson Chidiebere OnyekwerePas encore d'évaluation
- Peripheral Series: Frequency Measurement CardDocument2 pagesPeripheral Series: Frequency Measurement CardSohail APas encore d'évaluation
- EInfochips Double Patterning TechnologyDocument2 pagesEInfochips Double Patterning TechnologyPramod Kumar ReddyPas encore d'évaluation
- Novel Three-Phase Multilevel Inverter With Reduced Components For Low-And High-Voltage ApplicationsDocument10 pagesNovel Three-Phase Multilevel Inverter With Reduced Components For Low-And High-Voltage ApplicationsLawiii KkkPas encore d'évaluation