Académique Documents
Professionnel Documents
Culture Documents
Introduction
Transféré par
Soufiane ArquímedesCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Introduction
Transféré par
Soufiane ArquímedesDroits d'auteur :
Formats disponibles
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
1
Chapitre 1 Introduction la mthode des lments finis
1.1 Contexte
1.2 Mthode des lments finis
1.2.1 Principes
1.2.2 Discrtisation
1.2.3 Interpolation
1.2.4 Formulation des matrices lmentaires par les quations dquilibre
1.2.4.1 quations dquilibre des noeuds
1.2.4.2 Formulation des matrices lmentaires
1.2.5 Assemblage de la matrice globale
1.2.6 Application des conditions aux limites
1.2.7 Rsolution des quations pour les valeurs nodales : dplacements etc..
1.2.8 Dtermination des contraintes et ractions dans les lments
1.2.9 Autres mthodes de formulation des matrices lmentaires
1.2.9.1 nergie potentielle total minimale
1.2.9.2 Rsidus pondrs
1.2.10 Algorithme de calcul par lments finis
1.1 Contexte
Le point de dpart de toute modlisation est la ralit physique. Or, la complexit des
phnomnes tudis rend trs difficile la rsolution des quations mathmatiques qui sont
en gnral, des quations diffrentielles. Des approximations sont alors souvent
ncessaires. La figure 1.1 montre la dmarche et la procdure de modlisation.
Ralitphysique
Modlisationmathmatique Expriemntation
Solution ?
Idalistaion
Analytique approche Numrique approche
Approximation
Comparaison
Contrle des
erreurs
Solution analytique
exacte
Figure 1.1 Procdure de modlisation des systmes (Adapt de rf. 1)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
2
En pratique les solutions analytiques ne sont possibles que pour des cas simples. Deux
causes voques souvent sont : la mconnaissance du champ modlis et la complexit
de la gomtrie. La premire ncessite la proposition dune allure gnrique du champ
inconnu, tandis que le dcoupage du systme en domaines plus simples est la solution
pour contourner la deuxime difficult. La mthode des lments finis est la combinaison
de ces deux principes, (figure 1.2).
Mthode de Rayleigh-Ritz Discrtisation
Champ inconnu Gomtrie complexe
Mthode des
lments finis
Figure 1.2 Modlisation des systmes complexes (Adapt de rf. 1)
En ce qui concerne la rsolution du systme dquations diffrentielles dcrivant le
phnomne tudi, deux alternatives sont : analytique et numrique, (figure 1.3).
D() - f =0 dans le volume avec
les conditions aux limites
- Diffrence finies
- Mthode de Ritz
- lments finis
- Volume fini
- lments de frontire
- Sparation des variables
- Solution similaires
- Transformation de Fourrier ou de Laplace
Solutions analytiques
Solutions numriques
Figure 1.3 Mthodes de rsolution des problmes mathmatiques (Adapt de rf. 1)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
3
1.2 Mthode des lments finis
La mthode des lments finis permet de rsoudre les types de problmes prsents dans
la figure 1.4.
Rsolution des problmes physiques par la
mthode des lments finis
Mcanique des solide
Mcanique des fluides
Transfert de chaleur
Champ magntique
quilibre stationnaire Valeurs propres
Dynamique, vibration
Stabilit des structures
Flux laminaire
Acoustique
Dpendence du temps
Non linarit
Dynamique (cas gnral)
Thermique transitoire
Propagation (fissures)
Figure 1.4 Types de problmes physiques modliss par la mthode des lments finis
(Adapt de rf. 1)
Dans le cas de lanalyse des solides dformables, la mthode des lments finis consiste
restreindre le champ de dplacement en tout point du milieu par la dtermination du
dplacement aux certains points dfinis du milieu qui sont les nuds. Cette dmarche
sappelle la discrtisation (figure 1.5).
Figure 1.5 Principe de lapproximation (Rf.1)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
4
Le champ du domaine entre les valeurs nodales est interprt par la fonction de forme ou
fonction dinterpolation.
1.2.1 Discrtisation
Une structure physique analyser comporte des points permettant de dfinir sa
gomtrie, appels nuds physiques (joints de connexion, extrmits, etc..). Par ailleurs,
les lments finis cres par le dcoupage de cette structure en sous domaines selon la
mthode des lments finis sont connects entre eux par certain point dattache appels,
nuds du maillage. Les deuximes se trouvent de faon naturelle aux premiers. La
discrtisation des structures en diffrents types dlments selon les besoins.
Noeuds du
maillage
Noeuds
de
gomtrie
Noeuds
de
gomtrie
Noeuds du
maillage
lments 1 D
- Barres
- Poutres
- Coque axisymtrique
lments 2 D
- lasticit plane
- Axisymtrie
- Plaque mince
- Coque mince
lments 3 D
- Solide massif
- Plaques paisses
- Coques paisses
Figure 1.6 Discrtisation des systmes (Adapt de rf. 1)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
5
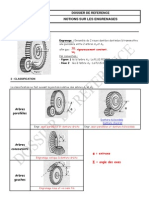
1.2.2 Types dlments
Les types dlments les plus utiliss sont prsents la figure 1.7. Le classement se fait
en fonction de lespace et du degr du polynme utiliss pour linterpolation.
Figure 1.7 Diffrents types dlments (Rf. 1)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
6
1.2.3 Interpolation
Lapproximation du champ rel par le champ approximatif peut scrit par lexpression
suivante :
x i
noeuds
(x,y,z) u(x,y,z) N (x,y,z).u =
o N
i
(x, y, z) est la fonction de forme ou fonction dinterpolation associ au nuds i et
u
i
est le dplacement au mme nud. Les fonctions de forme reprsentent le poids
associ chacun des nuds de llment permettant la prdiction de lvolution du
champ lintrieur du domaine dinterpolation.
Pour que linterpolation soit illicite, la fonction de forme doit :
tre continue sur le domaine;
conduire des valeurs uniques du champ en tout point du domaine pour un jeu
unique de valeurs nodales;
i j j j
1 au noeud j=i
N (x ,y ,z )
0 au noeuds j i
Cette condition permet que :
i i i i j i i i i
j i
u(x ,y ,z ) 1 x u 0 x u u(x ,y ,z ) u
= + =
Exemple :
Dterminez les fonctions de forme pour les lments liniques (1D) suivant en utilisant
les polynmes.
lment 1D 2 noeuds (interpolation linaire) :
Le champ de dplacement est :
1 2 x
0 L
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
7
| |
| |{ }
0
0 1
1
a
u(x) a ax 1 x
a
u(x) X a
= + =
`
)
=
(1)
Les deux conditions nodales suivantes permettent de dterminer les coefficients a
0
et a
1
:
0 1 1
0 1 2
u(0) a a.0 u
u(L) a a.L u
= + =
= + =
ou sous forme matricielle comme :
| |{ } { }
0 1
2 1
a u u(0) 1 0
u(L) 1 L u a
B a q
(
= =
` ` `
(
) ) )
= =
(2)
do la solution de ce systme dquations est :
{ } { } { }
0 1
2 1
1
1 0
a u
1 1
u a
L L
a B q
(
(
=
` `
(
) )
=
(3)
ou bien
0 1
1 1 2
a u
1 1
a u u
L L
=
= +
Substitution de (3) dans (1) :
| || | { }
1
u(x) X B q
= (4)
Afin de dterminer les fonctions de forme, considrons lexpression gnrale de
lapproximation :
| |{ }
2
1
i i 1 1 2 2 1 2
i 1 2
u
u(x) N (x).u N (x).u N (x).u [N (x) N (x)]
u
u(x) N(x) q
=
= = + =
`
)
=
(5)
o N
i
(x) sont les fonctions de forme.
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
8
La comparaison des deux quations (4) et (5) donne :
| | | || |
1
N(x) X B
=
do
1 2
x x
N (x) x et N (x)
L L
= =
Figure 1.8 Fonctions de forme de llment 2 nuds
1.2.4 Formulation des matrices lmentaires par les quations de lquilibre
1.2.4.1 Les quations dquilibre des noeuds
Exemple 1.1 La figure 1.9 illustre une attache en aluminium dun systme de levage.
Sachant que son paisseur est de 5mm et que la charge pse 1.5KN, dterminez
lallongement et les contraintes au long de la pice.
Solution
Considrons la membrure de section A et dune longueur L soumise une charge F telle
quillustre la figure 1.9. La contrainte axiale est
F
A
= , tandis que la
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
9
dformation est :
L
L
= . Or selon la loi de Hooke : E = o E est le module
dlasticit. La charge devient par consquent :
AE
F ( ) L
L
= . Ce qui est semblable
lquation de la force du ressort : F kx = . Il est donc possible de modliser une
membrure de section uniforme soumise une charge axiale par un ressort dont la rigidit
est :
AE
k
L
= .
A
L
F
F
x
L
Figure 1.9 Membrure de section uniforme soumise une force externe F
A
1
A2
A3
L
1
L
2
L
3
P
P
u
1
u
2
u
3
u
4
k
1
k
2
k
3
1
2
3
4
Figure 1.10 Discrtisation de la pice en lments et nuds
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
10
Par consquent, la pice prsente la figure 1.10 peut tre modlise comme un systme
de 3 (lments) ressorts en srie. Le diagramme du corps libre des noeuds avec les forces
appliques chacun des nuds de 1 4 est montr la figure 1.11.
Figure 1.11 Diagramme du corps libre des nuds
Les quations dquilibre statique scrivent :
Nud 1 : R
1
k
1
(u
2
u
1
) =0
Nud 2 : k
1
(u
2
u
1
) k
2
(u
3
u
2
) =0
Nud 3 : k
2
(u
3
u
2
) k
3
(u
4
u
3
) =0
Nud 4 : k
3
(u
4
u
3
) P =0
ou :
Nud 1
Nud 2
Nud 3
Nud 4
R
1
k
1
(u
2
-u
1
)
k
2
(u
3
-u
2
)
k
3
(u
4
-u
3
)
k
3
(u
4
-u
3
)
P
k
1
(u
2
-u
1
)
k
2
(u
3
-u
2
)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
11
1 1 1 1
1 1 2 2 2
2 2 3 3 3
3 3 4
k k 0 0 u R
k k k k 0 u 0
(c)
0 k k k k u 0
0 0 k k u P
(
(
+
(
=
` `
( +
(
) )
ou en sparant les raction et les forces externes:
1 1 1 1
1 1 2 2 2
2 2 3 3 3
3 3 4
k k 0 0 u R 0
k k k k 0 u 0 0
(d)
0 k k k k u 0 0
0 0 k k u 0 P
(
(
+
(
=
` ` `
( +
(
) ) )
{ } | |{ } { } R k u F =
ou {Raction} =[Rigidit] {Dplacement} {Chargement}
Le dplacement du nud (1) est nul cause de la fixation de lextrmit suprieure de la
membrure. Lapplication de cette condition aux limites rend le systme dquations (c)
un nouveau systme dquations :
1
1 1 2 2 2
2 2 3 3 3
3 3 4
1 0 0 0 u 0
k k k k 0 u 0
0 k k k k u 0
0 0 k k u P
(
(
+
(
=
` `
( +
(
) )
[Rigidit] {Dplacement} ={Chargement}
Sachant que u
1
=0, la rsolution de ce systme dquations donne les valeurs nodales de
dplacement. Le(s) raction(s) peuvent se calculer laide de la rsolution du systme
dquation (d).
1.2.4.2 Formulation des matrices lmentaires
Chaque lment du modle de lexemple 1.1 contient 2 nuds avec chacun un
dplacement associ. Il nous faut donc dvelopper deux quations par lment. Les
forces internes en fonction de la rigidit de llment et du dplacement nodal telles
quillustres la figure 1.12 (b) sont :
i i i 1
i 1 i 1 i
f k (u u )
f k(u u )
+
+ +
=
=
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
12
ou sous forme matricielle :
i i
i 1 i 1
f u k k
f k k u
+ +
(
=
` `
(
) )
(Notons que les deux diagrammes du corps libre de llment sont quivalents.)
ui+1
ui
f
i
=k(u
i+1
-u
i
)
f
i+1
=k(u
i+1
-u
i
)
ui+1
ui
f
i
=k(u
i
-u
i+1
)
f
i+1
=k(u
i+1
-u
i
)
y
(a)
(b)
Figure 1.12 Diagramme du corps libre de llment
1.2.5 Assemblage de la matrice globale
La matrice de rigidit de llment (1) est :
| |
(1)
1 1
1 1
k k
K
k k
(
=
(
et sa position dans la matrice globale est :
| |
1 1 1
(1G)
2 1 1
3
4
u k k 0 0
u k k 0 0
K
u 0 0 0 0
u 0 0 0 0
(
(
(
=
(
(
Par analogie on obtient pour les lments (2) et (3) :
| |
(2)
2 2
2 2
k k
K
k k
(
=
(
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
13
| |
1
(2G)
2 2 2
3 2 2
4
u 0 0 0 0
u 0 k k 0
K
u 0 k k 0
u 0 0 0 0
(
(
(
=
(
(
| |
(3)
3 3
3 3
k k
K
k k
(
=
(
| |
1
(3G)
2
3 3 3
3 3 4
0 0 0 0 u
0 0 0 0 u
K
0 0 k k u
0 0 k k u
(
(
(
=
(
(
La matrice globale est assemble par laddition des matrices :
| | | | | | | |
(G) (1G) (2G) (3G)
K K K K = + +
1 1 1
1 1 2 2 2
2 2 3 3 3
3 3 4
k k 0 0 u
k k k k 0 u
0 k k k k u
0 0 k k u
(
(
+
(
( +
(
1.2.6 Application des conditions aux limites
Sachant que u
1
=0, le systme dquations devient :
1
1 1 2 2 2
2 2 3 3 3
3 3 4
1 0 0 0 u 0
k k k k 0 u 0
0 k k k k u 0
0 0 k k u P
(
(
+
(
=
` `
( +
(
) )
1.2.7 Rsolution du systme dquations
1
1 1 2 2 2
2 2 3 3 3
3 3 4
1 0 0 0 u 0
k k k k 0 u 0
0 k k k k u 0
0 0 k k u P
(
(
+
(
=
` `
( +
(
) )
La rsolution du systme dquations rduit nous donne les dplacements correspondants.
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
14
Application numrique :
Les dplacements nodaux et les contraintes dans les lments se dterminent avec les
donnes suivantes :
E =70GPa; A
1
=480mm
2
; A
2
=120 mm
2
; A
3
=360 mm
2
; L
1
=3 mm; L
2
=10mm;
L
3
=3mm; P =1 800N.
1.2.8 Calcul des contraintes dans les lments et les ractions
Les contraintes se calcul laide de la loi de Hooke en connaissant les dplacements
nodaux :
i 1 i
u u
E E( )
L
+
= =
Le tableau 1.1 prsente les rsultats.
Tableau 1.1 Proprits des lments, dplacements nodaux et contraintes
lment Nud A
(mm
2
)
L
(mm)
E
(MPa)
k=(AE/L)
(MPa)
u
(mm)
i
=E(u
i+1
-
u
i
)/L
(MPa)
1 1 480 3 70 000 11 200 000 0 3.7567
2 0.000161
2 2 120 10 70 000 840 000 0.000161 15.001
3 0.002304
3 3 360 3 70 000 8 400 000 0.002304 4.993
4 0.002518
Vrification :
1
1
1
2
3
3
1800
3.75
480
1800
15
120
1800
5
360
P
MPa
A
P
MPa
A
P
MPa
A
= = =
= = =
= = =
Les ractions peuvent se calculer laide du systme dquation(d). Ce qui donne une
valeur de R
1
=P=1800N.
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
15
1.2.9 Autres mthodes pour la formulation des matrices lmentaires
1.2.9.1 nergie potentielle totale minimale
Un corps solide soumis des forces externes se dforme. Durant cette dformation le
travail de ces forces est emmagasin dans le corps solide sous forme de lnergie de
dformation. Figure 1.13, prsente une membrure qui se dforme sous laction dune
force axiale F. Lorsque la membrure sallonge dune distance dy, lnergie de
dformation dans le matriau est :
Dans le cas dun volume infiniment petit de la membrure cette nergie scrit :
Figure 1.13 Comportement lastique dune membrure soumise au chargement axial
Lnergie totale de dformation emmagasine dans la membrure scrit :
o V est le volume de la membrure.
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
16
Lnergie potentielle totale pour un corps solide comportant n lments et m nuds
est la diffrence entre lnergie de dformation totale et le travail fourni par les forces
externes :
n m
(e)
i i
e 1 i 1
Fu
= =
=
Lquilibre dun corps solide se ralise lorsque cette nergie est minimale :
n m
(e)
i i
e 1 i 1
i i i
Fu 0 pour i 1,2,3...,n
u u u
= =
= = =
Lapplication de ce thorme permet de dterminer les dplacements nodaux.
Les quations lmentaires peuvent sobtenir par la minimisation de lnergie potentielle
totale de llment. En sappliquant ce principe lexemple antrieur, lnergie de
dformation dans un lment quelconque du modle scrit :
2
2 2
i 1 i i 1 i
V
i 1 i
E AE
dV (u u 2u u )
2 2L
u u
o
L
+ +
+
= = +
La diffrentiation de lnergie de dformation donne les quations suivantes :
(e)
i i 1 i i 1
i
AE
(u u ) k(u u )
u L
+ +
= =
(e)
i 1 i i 1 i
i 1
AE
(u u ) k(u u )
u L
+ +
+
= =
(e)
i i
(e)
i 1
i 1
u u k k
k k u
u
+
+
(
=
` `
(
)
o k
eq
=(A
moy
E)/L
et pour les forces externes agissant au nuds i et i+1 on obtient :
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
17
Finalement la matrice de rigidit globale de la structure est obtenue en additionnant celle
des lments comme dans le cas de la mthode de formulation directe.
1.2.9.2 Rsidus pondrs
Cette approche est base sur le principe de minimiser lerreur entre la solution propose
et la solution exacte de lquation diffrentielle du phnomne tudi. La solution
propose doit satisfaire les conditions aux limites. Dans cette catgorie dapproche, il
existe plusieurs mthodes. Seulement la mthode de Galerkin est prsente ici comme
illustration.
Ex. 1.2 Soit une membrure en aluminium de section variable qui est fixe une
extrmit et soumise une charge P lautre extrmit telle quillustre la figure 1.14.
Sachant que son paisseur est t tandis que et le module dlasticit de laluminium est E
dterminez la rpartition de lallongement de la membrure suivant sa longueur.
Figure 1.14 La contrainte moyenne dans la membrure en fonction de la force applique
Solution exacte :
Lquilibre des forces suivant la direction y donne lquation suivante:
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
18
o
du
dy
=
En rarrangeant les termes, on obtient :
Pdy
du
EA(y)
=
Le dplacement en fonction de y est alors :
u L L
0 0 0
2 1
1
Pdy Pdy
u(y) du
w w
EA(y)
E(w ( )y)t
L
= = =
+
o la section une distance y est :
2 1
1
w w
A(y) (w ( )y)t
L
= +
Finalement :
2 1
1 1
2 1
(w w ) PL
u(y) ln w y lnw
Et(w w ) L
( | | | |
= +
( | |
\ . \ .
Application numrique :
Soit w
1
=50.8mm, w
2
=25.4mm, L =254mm, t =3.175mm, E =71 705MPa, P =
4448N.
Tableau 1.2 Dplacement exacte suivant la longueur de la membrure
y
(mm)
u(y)
(mm)
0.0 0.000000
63.5 0.026089
127.0 0.056206
190.5 0.091828
254.0 0.135424
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
19
Solution par la mthode de Galerkin :
Reconsidrons lexemple 1.2, lquation de lquilibre est :
du
EA(y) P 0
dy
=
Proposons une solution de la forme :
2 3
1 2 3
u(y) ay a y a y = + +
La fonction de lerreur est alors :
2 2 1
1 1 2 3
A(y)
w w
(w ( )y)t E (a 2a y 3a y ) P
L
| |
+ + + =
|
\ .
Lapplication des donnes numriques donne :
2
1 2 3
(1.842 0.3175y)(a 2a y 3a y ) 0.062032
E
= + +
La mthode de Galerkin implique :
b
a
dy 0 i 1,2,...,N = =
o les fonctions de pondration sont
1
=y;
2
=y
2
et
3
=y
3
pour le cas dune solution
propose contenant 3 inconnus. Par consquent :
L
0
L
2
0
L
3
0
y( )dy 0
E
y ( )dy 0
E
y ( )dy 0
E
Lintgration de ces quations donne le systme dquations suivant:
1
2
6
3
a 3468595.2133333 1101278980.2333 302102849857.62 2001.0262045882
550639490.11665 201401899905.07 59682096338527 a 338840.43731026
100700949952.54 39788064225692 1.237489975502.(10) 64549 a
(
(
=
`
(
(
)
103.307609
`
)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
20
La rsolution de systme dquations donne a
1
=0.000401, a
2
=1.577259.(10)
-7
et a
3
=
1.448925.(10)
-9
.
Le dplacement en fonction de y est par consquent :
-7 2 -9 3
u(y) 0.000401y +1.577259.(10) y +1.448925.(10) y . =
Application numrique :
Soit w
1
=50.8mm, w
2
=25.4mm, L =254mm, t =3.175mm, E =71 705MPa, P =
4448N.
Tableau 1.3 Dplacement suivant la longueur de la membrure obtenu par la mthode de
Galerkin
y
(mm)
Solution exacte
Approximation par la
mthode de Galerkin
u(y)
(mm)
u(y)
(mm)
0.0 0.000000 0.000000
63.5 0.026089 0.026447
127.0 0.056206 0.056391
190.5 0.091828 0.092060
254.0 0.135424 0.135678
1.2.10 Algorithme de calcul par la mthode des lments finis
Lalgorithme de calcul comporte trois phases :
Pr-processeur Dfinition du modle, calcul des matrices lmentaires, lassemblage de la
matrice global et lintroduction des conditions aux limites
Solveur Rsolution numrique du systme matriciel pour lobtention des
dplacements nodaux
Post-processeur Calcul des contraintes des dformations et des ractions. Cette phase
contient galement le traitement graphique (illustrations, analyses, coupes,
rapport etc.)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
21
Rfrences
[1] Comprendre les lments finis - Principes, formulations et exercices
corrigs, Alain Chateauneuf, Ellipses, ISBN 978-2-7298-5430-0
[2] Finite Element Analysis Theory and Application with ANSYS, 3
rd
Edition, Saeed Moaveni, Pearson Prentice Hall, ISBN 978-0-13-189080-0
[3] A first course in the Finite Element Method using Algor, Dany Logan,
PWS publishing Co, ISBN 0-534-94692-5
Exercices
1. Dterminez les fonctions de forme pour les lments liniques suivants en
utilisant les polynmes :
Rponses : a) N
1
(x)=1-3x/L+2x
2
/L
2
, N
2
(x)=4x/L-4x
2
/L
2
, N
3
(x)=-x/L+2X
2
/L
2
b) N1(x)=1-11x/2L+9x
2
/L
2
-9x
3
/2L
3
,
N2(x)=9x/L-45x
2
+27x
3
/2L
3
N3(x)=-9x/2L+18x
2
/L
2
-27x
3
/2L
3
N4(x)=x/L-9x
2
/2L
2
+9x
3
/2L
3
1 4
x
0 L
2 3
L/3 2L/3
(b)
1 3
x
0 L
2
L/2
(a)
Mcanique des structures en matriaux composites par les mthodes
analytiques et des lments finis - Statique
2013
22
2. La figure suivante prsente une plaque dacier qui est soumise une force
axiale F=3 500N. Sachant que lpaisseur de la plaque est 1.6mm et que le
module dlasticit de lacier est 210 GPa, calculer lallongement et les
contraintes au long de la plaque.
5
0
m
m
5
0
m
m
2
5
m
m
25mm 100mm 50mm
F
Vous aimerez peut-être aussi
- CombustionsDocument8 pagesCombustionsSoufiane ArquímedesPas encore d'évaluation
- Engrenage Prof PDFDocument5 pagesEngrenage Prof PDFSoufiane ArquímedesPas encore d'évaluation
- Test de Cours 2012 PDFDocument2 pagesTest de Cours 2012 PDFSoufiane ArquímedesPas encore d'évaluation
- TD DDS 01 - 2012 PDFDocument1 pageTD DDS 01 - 2012 PDFSoufiane Arquímedes67% (3)
- Dyn Struct C4 Proprietes Des Systemes Vibrants PDFDocument24 pagesDyn Struct C4 Proprietes Des Systemes Vibrants PDFSoufiane ArquímedesPas encore d'évaluation
- TD DDS 03 - 2012 PDFDocument1 pageTD DDS 03 - 2012 PDFSoufiane ArquímedesPas encore d'évaluation
- TD DDS 02 - 2012 PDFDocument1 pageTD DDS 02 - 2012 PDFSoufiane ArquímedesPas encore d'évaluation
- Dyn Struct C3 Vibration Forcee PDFDocument22 pagesDyn Struct C3 Vibration Forcee PDFSoufiane ArquímedesPas encore d'évaluation
- Dyn Struct C04 Vibration Des Systemes ContinuDocument17 pagesDyn Struct C04 Vibration Des Systemes ContinuSoufiane ArquímedesPas encore d'évaluation
- Dyn Struct C3 Vibration Forcee PDFDocument22 pagesDyn Struct C3 Vibration Forcee PDFSoufiane ArquímedesPas encore d'évaluation
- Dyn Struct C1 Vibration Libre PDFDocument28 pagesDyn Struct C1 Vibration Libre PDFSoufiane ArquímedesPas encore d'évaluation
- Dyn Struct C0 PDFDocument4 pagesDyn Struct C0 PDFSoufiane ArquímedesPas encore d'évaluation
- Vibrations Et Ondes MecaniquesDocument115 pagesVibrations Et Ondes MecaniquesWalid Bouaffou67% (6)
- Irdh575 D00089 M XXFRDocument96 pagesIrdh575 D00089 M XXFRMh BengrinePas encore d'évaluation
- Chap 1 S3Document26 pagesChap 1 S3MomoBjPas encore d'évaluation
- 1 - MOUVEMENT - Rotation - Exp - Et - SM PDFDocument4 pages1 - MOUVEMENT - Rotation - Exp - Et - SM PDFAzizElheni100% (1)
- PFEDocument23 pagesPFEKebciAdlenPas encore d'évaluation
- Ue 55p Travaux PratiquesDocument82 pagesUe 55p Travaux PratiquesSouhaib LoudaPas encore d'évaluation
- Les PortraitsDocument18 pagesLes Portraitsricochet67Pas encore d'évaluation
- EMD1Document6 pagesEMD1Amada TarekPas encore d'évaluation
- Crison - PH PDFDocument2 pagesCrison - PH PDFmeriem ouaPas encore d'évaluation
- TP N°2 Schéma D'installation PID PDFDocument5 pagesTP N°2 Schéma D'installation PID PDFchaima gasmiPas encore d'évaluation
- C2 120FR022007Document24 pagesC2 120FR022007Alfredho ShactarPas encore d'évaluation
- Dalles Et Escalier Préfab en B-A PDFDocument17 pagesDalles Et Escalier Préfab en B-A PDFRedouane TebbounePas encore d'évaluation
- Physique QuantiqueDocument23 pagesPhysique QuantiqueFabienPas encore d'évaluation
- Livre Blanc Efficacite Energetique Des MachinesDocument16 pagesLivre Blanc Efficacite Energetique Des MachinesFx EtaixPas encore d'évaluation
- Robotique Ch4 PDFDocument35 pagesRobotique Ch4 PDFDoaa RachdiPas encore d'évaluation
- TDDocument2 pagesTDSohirSohirPas encore d'évaluation
- TD 8 Math PAPPDocument3 pagesTD 8 Math PAPPHaithem AminePas encore d'évaluation
- Série 7 Physique Changement Des États PhysiquesDocument3 pagesSérie 7 Physique Changement Des États PhysiquesSamou_haa100% (4)
- Chapitre 2 Controle US Docs Etudiants SiteDocument20 pagesChapitre 2 Controle US Docs Etudiants SiteAlemPas encore d'évaluation
- On Représente Un Système Mécanique ComplexeDocument3 pagesOn Représente Un Système Mécanique ComplexeAnonymous mBFHVAVxpPas encore d'évaluation
- Fonction Affine 2Document2 pagesFonction Affine 2vivianesezinePas encore d'évaluation
- User Guide Residencia 3Document60 pagesUser Guide Residencia 3redo80Pas encore d'évaluation
- Optique AdaptativeDocument7 pagesOptique AdaptativeMoustafa KOULOUGHLIPas encore d'évaluation
- CCF T3 SciencesDocument4 pagesCCF T3 SciencesBouallegue MounirPas encore d'évaluation
- Calcul PDC Vitesse PuissanceDocument11 pagesCalcul PDC Vitesse PuissanceAbdoul Fatré KienouPas encore d'évaluation
- Lettre de Motivation 3Document2 pagesLettre de Motivation 3Diany Pau T H100% (5)
- 5 - Intro Raman PDFDocument20 pages5 - Intro Raman PDFDjalal DaouiPas encore d'évaluation