Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- HP LaserJet 5P - 6P Service Manual (Proper)Document116 pagesHP LaserJet 5P - 6P Service Manual (Proper)maroudasp100% (1)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Physics For Entertainment Volume 1 (Yakov Perelman)Document211 pagesPhysics For Entertainment Volume 1 (Yakov Perelman)snath7800Pas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- National Climate Assessment - Forest Sector Technical ReportDocument623 pagesNational Climate Assessment - Forest Sector Technical ReportmizzakeePas encore d'évaluation
- Plankton ID Guide Under 40 CharactersDocument5 pagesPlankton ID Guide Under 40 CharactersmizzakeePas encore d'évaluation
- Jetty Modification - Upd 250417Document86 pagesJetty Modification - Upd 250417Deni Yudha PermanaPas encore d'évaluation
- Reservoir Saturation ToolDocument19 pagesReservoir Saturation ToolAli Jay JPas encore d'évaluation
- SOP's For All Digital Marketing ActivitesDocument3 pagesSOP's For All Digital Marketing ActivitesSavijeet Singh50% (2)
- CO2 Production PlantsDocument4 pagesCO2 Production PlantsBoojie Recto100% (1)
- Field and Laboratory Methods For General Zoology PDFDocument10 pagesField and Laboratory Methods For General Zoology PDFmizzakee0% (1)
- Wcms 209132 PDFDocument167 pagesWcms 209132 PDFDimas HastomoPas encore d'évaluation
- Analisis Siklus Hidup Destinasi Pariwisata Bali Kajian Ekonomi Pariwisata TerhadapnbspdestinasiDocument13 pagesAnalisis Siklus Hidup Destinasi Pariwisata Bali Kajian Ekonomi Pariwisata TerhadapnbspdestinasimizzakeePas encore d'évaluation
- Habitat Rehabilitation - Global Review of Effectiveness and Guidance For Rehabilitation of Freshwater Ecosystems PDFDocument122 pagesHabitat Rehabilitation - Global Review of Effectiveness and Guidance For Rehabilitation of Freshwater Ecosystems PDFmizzakee100% (1)
- Binary Encoding (Using ENVI) Exelis VIS Docs CenterDocument2 pagesBinary Encoding (Using ENVI) Exelis VIS Docs CentermizzakeePas encore d'évaluation
- Analisis Kelayakan Lokasi Tempat Pemrosesan Akhir Sampah Airmadidi Bawah Kabupaten Minahasa Utara PDFDocument12 pagesAnalisis Kelayakan Lokasi Tempat Pemrosesan Akhir Sampah Airmadidi Bawah Kabupaten Minahasa Utara PDFmizzakeePas encore d'évaluation
- Spectral Transformer For Lands at 8Document11 pagesSpectral Transformer For Lands at 8Irwan BudiartoPas encore d'évaluation
- Finding Invalid Values Based On A Lookup Table - ArcGIS ResourcesDocument4 pagesFinding Invalid Values Based On A Lookup Table - ArcGIS ResourcesmizzakeePas encore d'évaluation
- Dampak Kegiatan Budidaya Ikan Dalam Keramba Jaring Apung Terhadap Tingkat Kesuburan Perairan Situ Tegal Abidin PDFDocument138 pagesDampak Kegiatan Budidaya Ikan Dalam Keramba Jaring Apung Terhadap Tingkat Kesuburan Perairan Situ Tegal Abidin PDFmizzakeePas encore d'évaluation
- A Methodological Approach For An Index-Based Analysis For Brandenburg (Northeastern Germany)Document1 pageA Methodological Approach For An Index-Based Analysis For Brandenburg (Northeastern Germany)mizzakeePas encore d'évaluation
- Ecological Methods Handbook PDFDocument144 pagesEcological Methods Handbook PDFmizzakeePas encore d'évaluation
- A Methodological Approach For An Index-Based Analysis For Brandenburg (Northeastern Germany)Document1 pageA Methodological Approach For An Index-Based Analysis For Brandenburg (Northeastern Germany)mizzakeePas encore d'évaluation
- An Illustrated Guide To AHPDocument21 pagesAn Illustrated Guide To AHPmizzakeePas encore d'évaluation
- How To Disable Default Locators That Connect ToDocument1 pageHow To Disable Default Locators That Connect TomizzakeePas encore d'évaluation
- How Can I Improve The Performance and Start-Up Time of Arcgi PDFDocument3 pagesHow Can I Improve The Performance and Start-Up Time of Arcgi PDFmizzakeePas encore d'évaluation
- Devcocast Application ManualDocument212 pagesDevcocast Application ManualmizzakeePas encore d'évaluation
- Arp1429 PDFDocument10 pagesArp1429 PDFmizzakeePas encore d'évaluation
- Physical Habitat Mapping and Assesment in Bluefileds'Bay Fish Sanctuary, Westmoreland, JamaicaDocument211 pagesPhysical Habitat Mapping and Assesment in Bluefileds'Bay Fish Sanctuary, Westmoreland, JamaicamizzakeePas encore d'évaluation
- 4 - Weights To Determine Relative Efficiency Data Envelopment Analysis - DEAzoneDocument8 pages4 - Weights To Determine Relative Efficiency Data Envelopment Analysis - DEAzonemizzakeePas encore d'évaluation
- AHP and Fuzzy AHPDocument2 pagesAHP and Fuzzy AHPmizzakeePas encore d'évaluation
- 1A Working With Imagery in ArcGIS10Document72 pages1A Working With Imagery in ArcGIS10mizzakeePas encore d'évaluation
- 2 - Introduction Data Envelopment Analysis - DEAzoneDocument8 pages2 - Introduction Data Envelopment Analysis - DEAzonemizzakeePas encore d'évaluation
- Operational Rapid Flood Mapping, A Pilot Study in Mekong AreaDocument4 pagesOperational Rapid Flood Mapping, A Pilot Study in Mekong AreamizzakeePas encore d'évaluation
- Satellite Remote Sensing For An Ecosystem Approach To Fisheries ManagementDocument42 pagesSatellite Remote Sensing For An Ecosystem Approach To Fisheries ManagementmizzakeePas encore d'évaluation
- Detection of Abnormal Fish Trajectories Using A Clustering Based Hierarchical ClassifierDocument11 pagesDetection of Abnormal Fish Trajectories Using A Clustering Based Hierarchical ClassifiermizzakeePas encore d'évaluation
- Covariance Based Fish Tracking in Real-Life Underwater EnvironmentDocument5 pagesCovariance Based Fish Tracking in Real-Life Underwater EnvironmentmizzakeePas encore d'évaluation
- Curvature Scale Space Image in Shape Similarity RetrievalDocument10 pagesCurvature Scale Space Image in Shape Similarity RetrievalmizzakeePas encore d'évaluation
- Historia de CatastroDocument7 pagesHistoria de CatastroMiki Sulca SosaPas encore d'évaluation
- Guide For Dynamic Report Generator - EndsfsdfsdfsdfsdfDocument15 pagesGuide For Dynamic Report Generator - Endsfsdfsdfsdfsdfmtech structuresPas encore d'évaluation
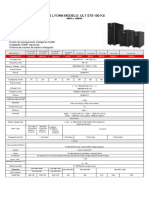
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzPas encore d'évaluation
- Experiment No 02Document5 pagesExperiment No 02Farhan AliPas encore d'évaluation
- Oracle Database - Introduction To SQL Ed 2Document5 pagesOracle Database - Introduction To SQL Ed 2Miguel Alfonso DIAZ MORRISPas encore d'évaluation
- Prescurtari PDFDocument67 pagesPrescurtari PDFהוד אנדרוPas encore d'évaluation
- 2011 Nov P1 Maths L2Document9 pages2011 Nov P1 Maths L2nhlanhlamhlambi3Pas encore d'évaluation
- DPWH Design Assessment ChecklistDocument18 pagesDPWH Design Assessment ChecklistGeovanni DumpasanPas encore d'évaluation
- Optical VibrationDocument6 pagesOptical VibrationKarthick VelayuthamPas encore d'évaluation
- Grade 6 MathDocument12 pagesGrade 6 Mathapi-264682510Pas encore d'évaluation
- Design of RC Building - ExerciseDocument6 pagesDesign of RC Building - Exercisesajeerala100% (1)
- Echotrac Mkiii: Operator'S ManualDocument48 pagesEchotrac Mkiii: Operator'S ManualKhắc PhongPas encore d'évaluation
- 1 11 S Kinetics StudentVersionDocument14 pages1 11 S Kinetics StudentVersionMuhammad ilhamPas encore d'évaluation
- Pipesim Model Management Program: For Reservoir, Production, and Process ModelingDocument2 pagesPipesim Model Management Program: For Reservoir, Production, and Process ModelingMauricio AlvaradoPas encore d'évaluation
- Synopsis: in Order To Decrease Cross Sectional Area of Structural Members, Ultra High StrengthDocument16 pagesSynopsis: in Order To Decrease Cross Sectional Area of Structural Members, Ultra High StrengthHector Alberto Garcia LopezPas encore d'évaluation
- Install and Configure Computer SystemsDocument18 pagesInstall and Configure Computer SystemsAlbino LarozaPas encore d'évaluation
- Heliosit OrthodonticDocument20 pagesHeliosit OrthodonticAndhika Galih PrasetyoPas encore d'évaluation
- Integumentary SystemDocument8 pagesIntegumentary SystemAshley Brithanie RamosPas encore d'évaluation
- FFA Furfural Fire and Health HazardsDocument2 pagesFFA Furfural Fire and Health HazardsYuga Pria PungkasanPas encore d'évaluation
- Swat Luu: User ManualDocument13 pagesSwat Luu: User ManualgjferreiraPas encore d'évaluation
- Narayana Iit Academy India: Paper - IDocument39 pagesNarayana Iit Academy India: Paper - Iaatt aattPas encore d'évaluation
- Project PBLDocument19 pagesProject PBLAdam LuqmanPas encore d'évaluation
- Newtons CowsDocument9 pagesNewtons CowsLawrence Lim Ah KowPas encore d'évaluation