Vous aimerez peut-être aussi
- Automatic Side Stand SystemDocument25 pagesAutomatic Side Stand SystemAravindh Kumar33% (3)
- Four Wheel Steering System DocumentDocument20 pagesFour Wheel Steering System DocumentBala comfortPas encore d'évaluation
- Hand Gesture Controlled Robot.Document70 pagesHand Gesture Controlled Robot.Aditya SharmaPas encore d'évaluation
- Coin Based Water Controlling SystemDocument34 pagesCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- Aqua Drone Ieee PaperDocument3 pagesAqua Drone Ieee PaperAkash ShahuPas encore d'évaluation
- Automatic Door Open @close Report FinalDocument36 pagesAutomatic Door Open @close Report FinalFelixJosephPas encore d'évaluation
- Project ReportDocument65 pagesProject ReportMusical world100% (1)
- Power Generation Using Speed Breakers and Efficient Use of Energy Created by It.Document57 pagesPower Generation Using Speed Breakers and Efficient Use of Energy Created by It.Vaibhav KharePas encore d'évaluation
- Solar Grass Cutter ProjectDocument12 pagesSolar Grass Cutter ProjectDEEPAK CPas encore d'évaluation
- Power Generation Through Speed BreakersDocument22 pagesPower Generation Through Speed BreakersSaikumar MysaPas encore d'évaluation
- Automated IrrigationDocument12 pagesAutomated IrrigationKarthik RaitaniPas encore d'évaluation
- Wireless Power TheftDocument13 pagesWireless Power TheftManjeet JunejaPas encore d'évaluation
- Solar Car - The ReportDocument39 pagesSolar Car - The Reportinvictus_khan50% (4)
- Electric Bicycle System PDFDocument57 pagesElectric Bicycle System PDFMahendra TantuwayPas encore d'évaluation
- Pedal Powered Water PurifierDocument30 pagesPedal Powered Water PurifierAnuj TripathiPas encore d'évaluation
- HYDRAULIC Bush Bearing Puller 2011 Ac FinalDocument47 pagesHYDRAULIC Bush Bearing Puller 2011 Ac FinalSelva Ganapathy50% (2)
- Sand Slinger MC Pneumatic 2016 VeltechDocument47 pagesSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamPas encore d'évaluation
- Build Vertical Axis Wind TurbineDocument45 pagesBuild Vertical Axis Wind TurbineThaha Refaye0% (2)
- Intelligent Braking System - SynopsisDocument6 pagesIntelligent Braking System - SynopsisTanviPas encore d'évaluation
- Fabrication of Multipurpose 4 in 1 Agriculture Robotic VehicleDocument33 pagesFabrication of Multipurpose 4 in 1 Agriculture Robotic Vehicleakshay gopal100% (1)
- Fyp-Electromagnetic BrakesDocument28 pagesFyp-Electromagnetic BrakesSunil Kumar GoudaPas encore d'évaluation
- Seminar ReportDocument15 pagesSeminar ReportSachin Igoor100% (1)
- Fabrication of Automatic Side Stand Braking Mechanism For Two WheelerDocument28 pagesFabrication of Automatic Side Stand Braking Mechanism For Two Wheelergnana muruganPas encore d'évaluation
- Remote Controlled Fan RegulatorDocument31 pagesRemote Controlled Fan RegulatorPradeep100% (16)
- Design and Fabrication of Mechanical Footstep Power GeneratorDocument19 pagesDesign and Fabrication of Mechanical Footstep Power GeneratorMonika kakadePas encore d'évaluation
- Button Operated Electromagnetic Gear ChangerDocument64 pagesButton Operated Electromagnetic Gear ChangermkkfakesPas encore d'évaluation
- Design and Fabrication of Quick Return Method Using Geneva MechanismDocument30 pagesDesign and Fabrication of Quick Return Method Using Geneva MechanismMohan PrasanthPas encore d'évaluation
- Introduction To Regenerative Braking SystemDocument6 pagesIntroduction To Regenerative Braking SystemdfgvdfsghdgfPas encore d'évaluation
- Automatic Mechanical Garage Door Opener ProjectDocument2 pagesAutomatic Mechanical Garage Door Opener Projectpramo_dassPas encore d'évaluation
- Electro Megnetic Brake SystemDocument46 pagesElectro Megnetic Brake SystemBalvinder PrajapatiPas encore d'évaluation
- Automatic Pneumatic Bumper For Four Wheeler Final Year Ieee Mech ProjectDocument60 pagesAutomatic Pneumatic Bumper For Four Wheeler Final Year Ieee Mech ProjectAnkit YadavPas encore d'évaluation
- Automatic Side-Stand Slider Assembly for Motorcycle SafetyDocument10 pagesAutomatic Side-Stand Slider Assembly for Motorcycle SafetydavePas encore d'évaluation
- Major Project Shopping TrolleyDocument50 pagesMajor Project Shopping TrolleyRohith SharmaPas encore d'évaluation
- Automatic Control of Railway Gate & ControlDocument88 pagesAutomatic Control of Railway Gate & Controlyogananda93% (14)
- PLC Based Home Automation PDFDocument95 pagesPLC Based Home Automation PDFRameshwar TalwarPas encore d'évaluation
- Design & Construction of A 220V Voltage StabilizerDocument48 pagesDesign & Construction of A 220V Voltage StabilizerSboPas encore d'évaluation
- Box Transport MechanismDocument41 pagesBox Transport MechanismsaijanPas encore d'évaluation
- Automatic Railway Gate Controller DocumentationDocument53 pagesAutomatic Railway Gate Controller Documentationmnair201167% (3)
- Power Generation Through Suspension SystemDocument12 pagesPower Generation Through Suspension SystemRaja Sahu100% (2)
- Report (Vaishnavi)Document46 pagesReport (Vaishnavi)Vaishnavi BPas encore d'évaluation
- Under Water Tunnel Major ProjectDocument26 pagesUnder Water Tunnel Major ProjectOm ParkashPas encore d'évaluation
- Automatic Pneumatic Bumper System For Four WheelerDocument33 pagesAutomatic Pneumatic Bumper System For Four WheelerRaj EndranPas encore d'évaluation
- 1.automatic Engine Locking System For Drunk and Drivers MSP430Document3 pages1.automatic Engine Locking System For Drunk and Drivers MSP430Hamed Raza80% (5)
- Automatic Digital Door Opening and Closing System Using Rack and Pinion MechanismDocument4 pagesAutomatic Digital Door Opening and Closing System Using Rack and Pinion MechanismJilly Arasu100% (2)
- Foot Step Power GenerationDocument5 pagesFoot Step Power GenerationAbhishek Kumar0% (2)
- Automatic Side Stand Retreiving SystemDocument49 pagesAutomatic Side Stand Retreiving SystemEtgsPas encore d'évaluation
- Automatic Side StandDocument6 pagesAutomatic Side StandShekhar SawantPas encore d'évaluation
- Project Report For TA201 - Rotating BridDocument20 pagesProject Report For TA201 - Rotating BridMuneef AhmadPas encore d'évaluation
- A Major ProjectDocument27 pagesA Major ProjectJanak KishorPas encore d'évaluation
- Section - 7 Water Treatment PlantDocument24 pagesSection - 7 Water Treatment PlantRavi ShankarPas encore d'évaluation
- SQL Practice ProblemsDocument4 pagesSQL Practice Problemsvish_vinnyPas encore d'évaluation
- QUANSER-3DOFHelicopter Reference ManualDocument38 pagesQUANSER-3DOFHelicopter Reference Manualkieranwood857015Pas encore d'évaluation
- Surya Group of Institution, Lucknow: Attempt All QuestionDocument8 pagesSurya Group of Institution, Lucknow: Attempt All QuestionSaurabh SinghPas encore d'évaluation
- SECTION 16480 Motor Controllers PHAÀN 16480 Boä Ñieàu Khieån Ñoäng CôDocument7 pagesSECTION 16480 Motor Controllers PHAÀN 16480 Boä Ñieàu Khieån Ñoäng Cômeeng2014Pas encore d'évaluation
- Accounting in Action: Summary of Questions by Study Objectives and Bloom'S TaxonomyDocument73 pagesAccounting in Action: Summary of Questions by Study Objectives and Bloom'S TaxonomyscribdpdfsPas encore d'évaluation
- Master Thesis, Fixed - Karoline PetersenDocument83 pagesMaster Thesis, Fixed - Karoline Petersendow2008Pas encore d'évaluation
- TOM Project ReportDocument21 pagesTOM Project Reportzachaboi33% (3)
- Intelligent Controller For Three-Phase Induction Motor DrivesDocument6 pagesIntelligent Controller For Three-Phase Induction Motor Drives9493397686Pas encore d'évaluation
- Ramesh Pal: Job History in Brief: Security SystemDocument4 pagesRamesh Pal: Job History in Brief: Security SystemSheikhKhanPas encore d'évaluation
- Super Eta ReportDocument6 pagesSuper Eta ReportJoel Forbes0% (1)
- Takayama 2016Document4 pagesTakayama 2016Varun GuptaPas encore d'évaluation
- Centriflow Fan FlaktDocument4 pagesCentriflow Fan FlakttalabiraPas encore d'évaluation
- IPhO2012 Theoretical ProblemDocument5 pagesIPhO2012 Theoretical ProblemJohnJachersonPas encore d'évaluation
- JC30 Datos TecnicosDocument1 pageJC30 Datos TecnicosGregorio Mata MartínezPas encore d'évaluation
- CMT overturns the received doctrine on joining steel to aluminiumDocument2 pagesCMT overturns the received doctrine on joining steel to aluminiumvonipkoPas encore d'évaluation
- ch7 - Butterfly Valve With Pneumatic Actuators PDFDocument10 pagesch7 - Butterfly Valve With Pneumatic Actuators PDFrazvanPas encore d'évaluation
- Mannol Atf Ag60 PDFDocument2 pagesMannol Atf Ag60 PDFUiTM MERBOKPas encore d'évaluation
- Lecture 24 - Continuous (Multispan) Beams and The Method of Three MomentsDocument10 pagesLecture 24 - Continuous (Multispan) Beams and The Method of Three MomentsMacrem MacremPas encore d'évaluation
- Nanni Diesel Moteur 2.60HE Spare Parts CatalogueQtyNotes22112111221111Document53 pagesNanni Diesel Moteur 2.60HE Spare Parts CatalogueQtyNotes22112111221111BobCavPas encore d'évaluation
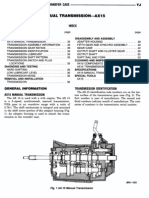
- Ax 15Document37 pagesAx 15cwarren1067% (3)
- DBOOK wdg4Document13 pagesDBOOK wdg4RUDHRESH KUMAR SPas encore d'évaluation
- Bearing Design in Machinery Engineering Tribology & LubricationDocument652 pagesBearing Design in Machinery Engineering Tribology & LubricationMuhammad Fahmi Mahmud100% (2)
- 2019 Africa Twin DCT Specifications : EngineDocument1 page2019 Africa Twin DCT Specifications : EngineBlahPas encore d'évaluation
- Chapter-2 - Fluid Statics - 230928 - 154632Document55 pagesChapter-2 - Fluid Statics - 230928 - 154632iqra abbasiPas encore d'évaluation
- English Manual PDFDocument16 pagesEnglish Manual PDFARISPas encore d'évaluation
- EME Unit 2 Turbines PPT by Kalyan ChakravarthyDocument64 pagesEME Unit 2 Turbines PPT by Kalyan ChakravarthyvenkatPas encore d'évaluation
- 498.03 821837931001 821837939999 PO128-Conveyor Front Flap BF 800 BPDocument9 pages498.03 821837931001 821837939999 PO128-Conveyor Front Flap BF 800 BPeshopmanual EnamPas encore d'évaluation
- DLVT - PG1 - 180412 PDFDocument1 pageDLVT - PG1 - 180412 PDFMechanical2022Pas encore d'évaluation
- SSP 372 The Shiftmatic Gearbox 0B81Document68 pagesSSP 372 The Shiftmatic Gearbox 0B81Robert AsafteiPas encore d'évaluation
- Design and Evaluate Finned Tube BundlesDocument6 pagesDesign and Evaluate Finned Tube BundlesGee FungPas encore d'évaluation
- UniFlair air cooled room cooling EERDocument2 pagesUniFlair air cooled room cooling EERKeo SokhimPas encore d'évaluation
- Suhaib Salawdeh ThesisDocument424 pagesSuhaib Salawdeh ThesisSarif NazarPas encore d'évaluation
- LT1139Document20 pagesLT1139Jhampier Sánchez ZambranoPas encore d'évaluation
- Toyota Pickup Spare Parts List 2012Document6 pagesToyota Pickup Spare Parts List 2012Huzaifa Hussain SiddiquiPas encore d'évaluation
- Nfpa 13d 2007 IndexDocument3 pagesNfpa 13d 2007 Indexsaladin1977Pas encore d'évaluation
- Dental Biocompatibility Guide: Materials, Properties, StandardsDocument96 pagesDental Biocompatibility Guide: Materials, Properties, StandardsPavan PreethamPas encore d'évaluation
- Tutorial Completo Stepper SKCDocument52 pagesTutorial Completo Stepper SKCricwerPas encore d'évaluation
- 1996 Club Car DS Golf Cart Owner's ManualDocument48 pages1996 Club Car DS Golf Cart Owner's Manualdriver33b60% (5)
- CHM 410 Mathematical Modeling CorrelationsDocument3 pagesCHM 410 Mathematical Modeling CorrelationsApril TanjayPas encore d'évaluation
- Unit Number 1: GAS ABSORPTIONDocument22 pagesUnit Number 1: GAS ABSORPTIONISAAC STANLYPas encore d'évaluation