Vous aimerez peut-être aussi
- Proceso elaboración harina aceite pescadoDocument18 pagesProceso elaboración harina aceite pescadoCarlos Gamarra75% (8)
- Nuevas Teorías Del Comercio InternacionalDocument46 pagesNuevas Teorías Del Comercio InternacionalJenniferGuzman100% (1)
- Fonseca Rodríguez Apropiacion Espacio PublicoDocument11 pagesFonseca Rodríguez Apropiacion Espacio PublicoValeria CarbajalPas encore d'évaluation
- Introducción A La Economia de La Empresa (42101) : Administración Y Dirección de Empresas Septiembre-01Document1 pageIntroducción A La Economia de La Empresa (42101) : Administración Y Dirección de Empresas Septiembre-01frank_garcia_2Pas encore d'évaluation
- Soluciones Del Examen de Febrero de 2003Document0 pageSoluciones Del Examen de Febrero de 2003frank_garcia_2Pas encore d'évaluation
- Tema 11 - Diseño en El Dominio de La FrecuenciaDocument10 pagesTema 11 - Diseño en El Dominio de La Frecuenciafrank_garcia_2Pas encore d'évaluation
- S0142101 0 04foDocument1 pageS0142101 0 04fofrank_garcia_2Pas encore d'évaluation
- Tema 09 - Identificación y Especificaciones en El Dominio de La FrecuenciaDocument7 pagesTema 09 - Identificación y Especificaciones en El Dominio de La FrecuenciaoverandresPas encore d'évaluation
- Tema 03 - Análisis de Sistemas Lineales en El Dominio Del TiempoDocument17 pagesTema 03 - Análisis de Sistemas Lineales en El Dominio Del TiempoAlejandro BejaranoPas encore d'évaluation
- Tema 07 - Lugar de Las RaícesDocument14 pagesTema 07 - Lugar de Las RaícesniggakingPas encore d'évaluation
- Tema 08 - Análisis de Sistemas Lineales en El Dominio de La FrecuenciaDocument21 pagesTema 08 - Análisis de Sistemas Lineales en El Dominio de La Frecuenciafrank_garcia_2Pas encore d'évaluation
- Tema 02 - Descripción Externa de Un Sistema DinámicoDocument11 pagesTema 02 - Descripción Externa de Un Sistema Dinámicofrank_garcia_2100% (1)
- Tema 10 - Análisis de Estabilidad en El Dominio de La Frecuencia PDFDocument8 pagesTema 10 - Análisis de Estabilidad en El Dominio de La Frecuencia PDFe09081110Pas encore d'évaluation
- Tema 05 - Sistemas RealimentadosDocument12 pagesTema 05 - Sistemas RealimentadosSebastian Rodrigo Contreras GamboaPas encore d'évaluation
- Tema 05 - Sistemas RealimentadosDocument12 pagesTema 05 - Sistemas RealimentadosSebastian Rodrigo Contreras GamboaPas encore d'évaluation
- Tema 01 - Introducción A Los Sistemas de ControlDocument14 pagesTema 01 - Introducción A Los Sistemas de Controlase dePas encore d'évaluation
- Problema Septiembre 2010-1Document9 pagesProblema Septiembre 2010-1frank_garcia_2Pas encore d'évaluation
- Problemas PropuestosDocument26 pagesProblemas Propuestosfrank_garcia_2Pas encore d'évaluation
- Preguntas de TestDocument52 pagesPreguntas de Testfrank_garcia_2Pas encore d'évaluation
- IS1 2006 SeptiembreDocument6 pagesIS1 2006 Septiembrefrank_garcia_2Pas encore d'évaluation
- Problemas PropuestosDocument26 pagesProblemas Propuestosfrank_garcia_2Pas encore d'évaluation
- IS1 2008 SeptiembreDocument4 pagesIS1 2008 Septiembrefrank_garcia_2Pas encore d'évaluation
- IS1 2009 SeptiembreDocument4 pagesIS1 2009 Septiembrefrank_garcia_2Pas encore d'évaluation
- IS1 2010 FebreroDocument2 pagesIS1 2010 Febrerofrank_garcia_2Pas encore d'évaluation
- IS1 2006 SeptiembreDocument6 pagesIS1 2006 Septiembrefrank_garcia_2Pas encore d'évaluation
- IS1 2006 FebreroDocument3 pagesIS1 2006 Febrerofrank_garcia_2Pas encore d'évaluation
- IS1 2009 FebreroDocument6 pagesIS1 2009 Febrerofrank_garcia_2Pas encore d'évaluation
- IS1 2008 FebreroDocument3 pagesIS1 2008 Febrerofrank_garcia_2Pas encore d'évaluation
- IS1 2007 FebreroDocument6 pagesIS1 2007 Febrerofrank_garcia_2Pas encore d'évaluation
- IS1 2007 SeptiembreDocument6 pagesIS1 2007 Septiembrefrank_garcia_2Pas encore d'évaluation
- IS1 2005 SeptiembreDocument2 pagesIS1 2005 Septiembrefrank_garcia_2Pas encore d'évaluation
- Clase 03 - Alumnos - Modelos Físicos IIDocument9 pagesClase 03 - Alumnos - Modelos Físicos IILiner ParicotoPas encore d'évaluation
- IS1 2005 FebreroDocument2 pagesIS1 2005 Febrerofrank_garcia_2Pas encore d'évaluation
- Formato de Asignación Escolar 2023 VFDocument2 pagesFormato de Asignación Escolar 2023 VFZahid CercadoPas encore d'évaluation
- Método MayéuticoDocument6 pagesMétodo MayéuticoAna RoblesPas encore d'évaluation
- Taller Catedra de La PazDocument5 pagesTaller Catedra de La PazVerónica Jaramillo saldarriagaPas encore d'évaluation
- Chimu FINALDocument9 pagesChimu FINALRivera Antonio MarcoPas encore d'évaluation
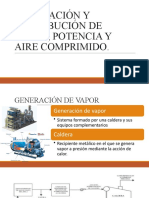
- Generación y Distribución de Vapor, Aire Comprimido y PotenciaDocument27 pagesGeneración y Distribución de Vapor, Aire Comprimido y PotenciaEliPas encore d'évaluation
- Foro 2Document2 pagesForo 2Pedro JimenezPas encore d'évaluation
- Consult A Graf SetDocument6 pagesConsult A Graf SetsantyPas encore d'évaluation
- El rol del psicólogo: una ciencia para comprender y mejorar la conducta humanaDocument21 pagesEl rol del psicólogo: una ciencia para comprender y mejorar la conducta humanaYusmely Barcenas VillalbaPas encore d'évaluation
- TBD PE V Rev2Document2 pagesTBD PE V Rev2Oscar Martinez AldanaPas encore d'évaluation
- 4° - UNIDAD DE APRENDIZA 1° GradoDocument5 pages4° - UNIDAD DE APRENDIZA 1° GradoJenny Anabelen armas AzabachePas encore d'évaluation
- PRL Suministro MartinezDocument4 pagesPRL Suministro MartinezNatica Vargas Garay100% (2)
- Gestión M. Baldom y LindaDocument24 pagesGestión M. Baldom y LindaMarieliza RodríguezPas encore d'évaluation
- 1.2 Desarrollo Histórico Del Término EcumenismoDocument2 pages1.2 Desarrollo Histórico Del Término EcumenismoSergio Gómez BuenrostroPas encore d'évaluation
- Plan de Actuacion Tarea 2 FarmaconogsiaDocument10 pagesPlan de Actuacion Tarea 2 FarmaconogsiaMadian castañoPas encore d'évaluation
- Taller n.2 - El Dios Que AdoramosDocument4 pagesTaller n.2 - El Dios Que AdoramosOliviaPas encore d'évaluation
- Licenciamiento Básico MicrosoftDocument42 pagesLicenciamiento Básico MicrosoftHerney Alejandro Obando Vera100% (2)
- Cuadernillo Logico Matematico 1 3 AñosDocument32 pagesCuadernillo Logico Matematico 1 3 AñosNathaly Ayllen Olmos MuñozPas encore d'évaluation
- Trabajo Administracion FinancieraDocument4 pagesTrabajo Administracion FinancieraMirka CPas encore d'évaluation
- Requisitos - Cta. BNDocument3 pagesRequisitos - Cta. BNMilagros MtvPas encore d'évaluation
- Analisis de La Realidad Interna y Del Entorno EscolarDocument21 pagesAnalisis de La Realidad Interna y Del Entorno Escolarjacqueline hurtadoPas encore d'évaluation
- Clase 1 Topicos de Ingenieria 2 2018Document36 pagesClase 1 Topicos de Ingenieria 2 2018Roberto Daniel PastenePas encore d'évaluation
- TAREA-2 Historia de La Ingeniería CivilDocument13 pagesTAREA-2 Historia de La Ingeniería CivilMICHELLE ISABEL TORRES LOPEZPas encore d'évaluation
- Certificado Catastral - 100022889081699Document1 pageCertificado Catastral - 100022889081699servinjud2022Pas encore d'évaluation
- Catering ServiceDocument8 pagesCatering ServiceIsis MarroquínPas encore d'évaluation
- Concurso de Artículos para La Primera Revista de Justicia Ambiental Del Ministerio Del AmbienteDocument4 pagesConcurso de Artículos para La Primera Revista de Justicia Ambiental Del Ministerio Del AmbienteDiario Oficial El PeruanoPas encore d'évaluation
- Ambiente Interno Vs ExternoDocument2 pagesAmbiente Interno Vs ExternochumioquePas encore d'évaluation
- Eduardo Quiroga GomezDocument11 pagesEduardo Quiroga GomezMarco Aurelio Sánchez LópezPas encore d'évaluation