Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- High Speed Calorimeter: InstrumentDocument2 pagesHigh Speed Calorimeter: Instrumentikaro181083Pas encore d'évaluation
- Screwthread Standards For Federal ServicesDocument12 pagesScrewthread Standards For Federal Servicesikaro181083Pas encore d'évaluation
- Screwthread Standards For Federal ServicesDocument12 pagesScrewthread Standards For Federal Servicesikaro181083Pas encore d'évaluation
- Screwthread Standards For Federal ServicesDocument12 pagesScrewthread Standards For Federal Servicesikaro181083Pas encore d'évaluation
- High Speed Calorimeter: InstrumentDocument2 pagesHigh Speed Calorimeter: Instrumentikaro181083Pas encore d'évaluation
- High Speed Calorimeter: InstrumentDocument2 pagesHigh Speed Calorimeter: Instrumentikaro181083Pas encore d'évaluation
- Screwthread Standards For Federal ServicesDocument12 pagesScrewthread Standards For Federal Servicesikaro181083Pas encore d'évaluation
- Screwthread Standards For Federal ServicesDocument12 pagesScrewthread Standards For Federal Servicesikaro181083Pas encore d'évaluation
- 25 Permanent Magnet Motor Design PDFDocument39 pages25 Permanent Magnet Motor Design PDFbitconcepts60% (5)
- Design and Prototyping Methods For Brushless Motors and Motor ControlDocument135 pagesDesign and Prototyping Methods For Brushless Motors and Motor Controlscardig0% (1)
- Shaper Gear CuttingDocument4 pagesShaper Gear Cuttingnevadablue100% (4)
- PC Power Supply Repair Magazine Article 1996 WW PDFDocument4 pagesPC Power Supply Repair Magazine Article 1996 WW PDFAnthony GonzalesPas encore d'évaluation
- 060 John Petro Final PaperDocument12 pages060 John Petro Final Paperikaro181083Pas encore d'évaluation
- The USB CNC Project Ported - Country LaboratoryDocument9 pagesThe USB CNC Project Ported - Country Laboratoryikaro181083100% (1)
- 4-Wire Resistance Measurement - DC CircuitsDocument4 pages4-Wire Resistance Measurement - DC Circuitsikaro181083100% (1)
- Stepper MotorsDocument3 pagesStepper Motorsikaro181083100% (1)
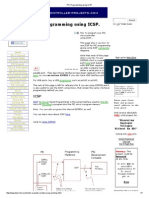
- PIC Programming Using ICSPDocument7 pagesPIC Programming Using ICSPikaro181083100% (1)
- ADC Value Sent On USB - Country LaboratoryDocument6 pagesADC Value Sent On USB - Country Laboratoryikaro181083Pas encore d'évaluation
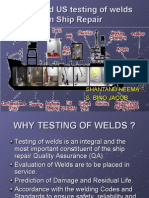
- X Ray TestingDocument24 pagesX Ray Testingapi-27176519100% (6)
- Windmill Controller Logger Shield - Country LaboratoryDocument3 pagesWindmill Controller Logger Shield - Country Laboratoryikaro181083Pas encore d'évaluation
- Thermoelectricity: Lessons in Electric Circuits, Volume 1, Chapter 9: "Electrical Instrumentation Signals"Document3 pagesThermoelectricity: Lessons in Electric Circuits, Volume 1, Chapter 9: "Electrical Instrumentation Signals"ikaro181083Pas encore d'évaluation
- X Ray TestingDocument24 pagesX Ray Testingapi-27176519100% (6)
- Automotive Alternator - Ac CircuitsDocument7 pagesAutomotive Alternator - Ac Circuitsikaro181083Pas encore d'évaluation
- Principles of Sigma-Delta Modulation For Analog-To-Digital ConvertersDocument71 pagesPrinciples of Sigma-Delta Modulation For Analog-To-Digital ConvertersGonzalo GarateguyPas encore d'évaluation
- Datasheet Tip141Document4 pagesDatasheet Tip141ikaro181083Pas encore d'évaluation
- TBAV70: Low Power Signal DiodesDocument4 pagesTBAV70: Low Power Signal Diodesikaro181083Pas encore d'évaluation
- KA258/KA258A, KA358/KA358A, KA2904: Dual Operational AmplifierDocument12 pagesKA258/KA258A, KA358/KA358A, KA2904: Dual Operational Amplifierikaro181083Pas encore d'évaluation
- Principles of Sigma-Delta Modulation For Analog-To-Digital ConvertersDocument71 pagesPrinciples of Sigma-Delta Modulation For Analog-To-Digital ConvertersGonzalo GarateguyPas encore d'évaluation
- MM74C00 - MM74C02 - MM74C04 Quad 2-Input NAND Gate - Quad 2-Input NOR Gate - Hex InverterDocument6 pagesMM74C00 - MM74C02 - MM74C04 Quad 2-Input NAND Gate - Quad 2-Input NOR Gate - Hex InverterPragnesh Hasmukhbhai GajjarPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Revathi RamyaDocument22 pagesRevathi Ramyamadhupavi_2007Pas encore d'évaluation
- Chapter 1Document21 pagesChapter 1iris33% (3)
- Fisa Tehnica ST3PRDocument1 pageFisa Tehnica ST3PRSembrePas encore d'évaluation
- Wilcoxon Short Form Catalog-2018Document36 pagesWilcoxon Short Form Catalog-2018Dhananjay B KPas encore d'évaluation
- Conversor Fibra MOXA Imc-21Document2 pagesConversor Fibra MOXA Imc-21João Baptista André SabiomactetoPas encore d'évaluation
- Whirlpool Awo-D7116 SM PDFDocument32 pagesWhirlpool Awo-D7116 SM PDFDamianPas encore d'évaluation
- Plastic-Insulated Winding Wires: Norddeutsche Seekabelwerke GMBH & Co. KGDocument6 pagesPlastic-Insulated Winding Wires: Norddeutsche Seekabelwerke GMBH & Co. KGcesar007chPas encore d'évaluation
- Service ManualDocument150 pagesService ManualSembeiNorimakiPas encore d'évaluation
- Re-640 Use en r1 - User ManualDocument140 pagesRe-640 Use en r1 - User ManualCláudio Luiz De PaulaPas encore d'évaluation
- UpRight LX31Document167 pagesUpRight LX31Krum KashavarovPas encore d'évaluation
- Operating Manual: Zhejiang Holip Electronic Technology Co., LTDDocument92 pagesOperating Manual: Zhejiang Holip Electronic Technology Co., LTDAlcides celpaPas encore d'évaluation
- Selak - Power System Protection - Where Are We Today PDFDocument42 pagesSelak - Power System Protection - Where Are We Today PDFIvan CabanalanPas encore d'évaluation
- 2023 - Adv Funct Materials - Frequency Modulation Based LongWave Infrared Detection and Imaging at Room TemperatureDocument9 pages2023 - Adv Funct Materials - Frequency Modulation Based LongWave Infrared Detection and Imaging at Room Temperaturemecoolboy82Pas encore d'évaluation
- Concept of Electrical InterlocksDocument15 pagesConcept of Electrical Interlocksprateek43513100% (1)
- SummitFamilySwitchesHardwareInstallationGuide Rev05Document210 pagesSummitFamilySwitchesHardwareInstallationGuide Rev05Valdir SouzaPas encore d'évaluation
- RR58 Good 3 Phase Regulator Rectifier DiagramDocument2 pagesRR58 Good 3 Phase Regulator Rectifier DiagramMick BurnsPas encore d'évaluation
- UM1709 User Manual: STM32Cube Ethernet IAP ExampleDocument22 pagesUM1709 User Manual: STM32Cube Ethernet IAP ExampleTameClaudioPas encore d'évaluation
- Healthcare Secure Power DistributionDocument14 pagesHealthcare Secure Power DistributionMaged BeshayPas encore d'évaluation
- Single Side BandDocument12 pagesSingle Side BandApril RodriquezPas encore d'évaluation
- Imation Swivel USB 2.0 Flash Drive Imation Drive Manager SoftwareDocument19 pagesImation Swivel USB 2.0 Flash Drive Imation Drive Manager SoftwarejadaleerigneyPas encore d'évaluation
- Comparative Analysis of Two Control Schemes ForDocument6 pagesComparative Analysis of Two Control Schemes ForHARMET UP3 PEMATANGSIANTARPas encore d'évaluation
- Sertifikat Relawan Covid19Document36 pagesSertifikat Relawan Covid19Nur Mutmainnah RahmanPas encore d'évaluation
- Marantz PM-7000 User GuideDocument17 pagesMarantz PM-7000 User Guidepeter11Pas encore d'évaluation
- SmartfusionDocument40 pagesSmartfusiongimen100% (5)
- Specific Resistance by CareyFoster's BridgeDocument5 pagesSpecific Resistance by CareyFoster's Bridgeprateekjain0150% (2)
- AP4310Document11 pagesAP431070134838Pas encore d'évaluation
- Speed Control of Switched Reluctance Motor-LibreDocument9 pagesSpeed Control of Switched Reluctance Motor-LibreIndrajithSrPas encore d'évaluation
- Uquran How ToDocument4 pagesUquran How Togw1921Pas encore d'évaluation
- U 208 BDocument7 pagesU 208 BPicastro ArtesaniasPas encore d'évaluation
- Favourable SlotDocument6 pagesFavourable Slotrakeshee2007Pas encore d'évaluation