Vous aimerez peut-être aussi
- Nuts and Volts 2006-02Document100 pagesNuts and Volts 2006-02scribd_20_emmanuelfaure67% (3)
- Finite-Element Analysis of A Constant-ForceDocument8 pagesFinite-Element Analysis of A Constant-Forcescribd_20_emmanuelfaurePas encore d'évaluation
- Comparison of Engine Power Correction Factors For Varying Atmospheric ConditionsDocument7 pagesComparison of Engine Power Correction Factors For Varying Atmospheric Conditionsscribd_20_emmanuelfaure100% (1)
- Instrumentation Techniques For Measuring Large High Rate Strains With SGDocument50 pagesInstrumentation Techniques For Measuring Large High Rate Strains With SGscribd_20_emmanuelfaurePas encore d'évaluation
- Understand Capacitor SoakingDocument7 pagesUnderstand Capacitor Soakingscribd_20_emmanuelfaurePas encore d'évaluation
- A Study of Cooling System of A Spark Ignition Engine To Improve Thermal EfficiencyDocument5 pagesA Study of Cooling System of A Spark Ignition Engine To Improve Thermal Efficiencyscribd_20_emmanuelfaure0% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Instruction Cadweld Grounding ConnectionsDocument2 pagesInstruction Cadweld Grounding ConnectionsadityaprazttPas encore d'évaluation
- A Process Model For EAF Steelmaking: NtroductionDocument9 pagesA Process Model For EAF Steelmaking: NtroductionacetilenPas encore d'évaluation
- 2nd Year Math Guess PaperDocument6 pages2nd Year Math Guess PaperArmaan MalikPas encore d'évaluation
- Grade 7 Mixtures and Solutions Full ReviewDocument28 pagesGrade 7 Mixtures and Solutions Full Reviewblackcat657Pas encore d'évaluation
- Force Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolDocument14 pagesForce Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolNguyenHuanPas encore d'évaluation
- BroombastickDocument3 pagesBroombastickAllen SornitPas encore d'évaluation
- 12V 24V Boost Converter PDFDocument5 pages12V 24V Boost Converter PDFIonescu ViorelPas encore d'évaluation
- Digital ImagingDocument13 pagesDigital ImagingSurya Prakash ThotakuraPas encore d'évaluation
- Comput. Methods Appl. Mech. Engrg.: Sam Cuvilliez, Frédéric Feyel, Eric Lorentz, Sylvie Michel-PonnelleDocument16 pagesComput. Methods Appl. Mech. Engrg.: Sam Cuvilliez, Frédéric Feyel, Eric Lorentz, Sylvie Michel-PonnellengPas encore d'évaluation
- Instruction Manual PHE PDFDocument78 pagesInstruction Manual PHE PDFzniperxPas encore d'évaluation
- Hsslive Class XII Deleted Topics by Scert 2022Document17 pagesHsslive Class XII Deleted Topics by Scert 2022Salim ShahulPas encore d'évaluation
- ProjectDocument2 pagesProjectWaqas MaanPas encore d'évaluation
- Modeling and Response Prediction in Performance-Based Seismic Evaluation: Case Studies of Instrumented Steel Moment-Frame BuildingsDocument33 pagesModeling and Response Prediction in Performance-Based Seismic Evaluation: Case Studies of Instrumented Steel Moment-Frame BuildingsAshish ɐʇoʞdɐsPas encore d'évaluation
- Module 1 - Les #4 Analysis of TrussDocument9 pagesModule 1 - Les #4 Analysis of Trusscutie4everrPas encore d'évaluation
- Physical Sciences PDFDocument51 pagesPhysical Sciences PDFfarooqi111Pas encore d'évaluation
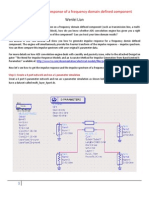
- Impulse Response of Frequency Domain ComponentDocument17 pagesImpulse Response of Frequency Domain Componentbubo28Pas encore d'évaluation
- CS3205 A8Document10 pagesCS3205 A8Rian BattlaxPas encore d'évaluation
- Antenna Radiation Electromagnetic Electrical Resistance Ohm MeterDocument6 pagesAntenna Radiation Electromagnetic Electrical Resistance Ohm Meterbiswa217Pas encore d'évaluation
- 2021 Physicsbowl Exam Equations: Continued On Next PageDocument3 pages2021 Physicsbowl Exam Equations: Continued On Next PageThe Entangled Story Of Our WorldPas encore d'évaluation
- Neon Genesis Evangelion ANIMA Vol. 4Document262 pagesNeon Genesis Evangelion ANIMA Vol. 4jojo100% (2)
- Complete Notes On 9th Physics by Asif RasheedDocument82 pagesComplete Notes On 9th Physics by Asif RasheedAsif Rasheed Rajput75% (28)
- Analytical Chemistry Basic ConceptsDocument12 pagesAnalytical Chemistry Basic ConceptsNino Jay FabrosPas encore d'évaluation
- Evo 979 enDocument2 pagesEvo 979 enSergio Denis UCPas encore d'évaluation
- Capacidad de ConductoresDocument4 pagesCapacidad de ConductoresCämpänitä FentyPas encore d'évaluation
- Rankine Cycle Notes PDFDocument6 pagesRankine Cycle Notes PDFmizpah mae jolito0% (1)
- White Paper - Hairline Cracking Within Concrete Block WallsDocument7 pagesWhite Paper - Hairline Cracking Within Concrete Block WallsBirju ThakkarPas encore d'évaluation
- Fisika ModernDocument79 pagesFisika ModernEndah RahmawatiPas encore d'évaluation
- Lecture 3-1: HFSS 3D Design Setup: Introduction To ANSYS HFSSDocument40 pagesLecture 3-1: HFSS 3D Design Setup: Introduction To ANSYS HFSSRicardo MichelinPas encore d'évaluation
- Demand FactorDocument17 pagesDemand Factorkatiki216100% (1)
- Vibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsDocument44 pagesVibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsVyankatesh AshtekarPas encore d'évaluation