Vous aimerez peut-être aussi
- Cddita - Page10Document1 pageCddita - Page10Harshal AmbatkarPas encore d'évaluation
- SyllabusDocument1 pageSyllabusHarshal AmbatkarPas encore d'évaluation
- Assignment 3Document1 pageAssignment 3Harshal AmbatkarPas encore d'évaluation
- Cddita - Page11Document1 pageCddita - Page11Harshal AmbatkarPas encore d'évaluation
- Scope of Eda ToolsDocument2 pagesScope of Eda ToolsHarshal AmbatkarPas encore d'évaluation
- TSMC 180nmDocument2 pagesTSMC 180nmHarshal Ambatkar100% (1)
- FlowCAD An Quick Start PSpice 172 LiteDocument26 pagesFlowCAD An Quick Start PSpice 172 LiteHarshal AmbatkarPas encore d'évaluation
- Comp Arch CH 03 L05 Booth AlgorDocument35 pagesComp Arch CH 03 L05 Booth AlgorLatesh RSPas encore d'évaluation
- Pedram 1Document15 pagesPedram 1Harshal AmbatkarPas encore d'évaluation
- Ieee Ieee STD - LOGIC - 1164: Library Use ALLDocument2 pagesIeee Ieee STD - LOGIC - 1164: Library Use ALLHarshal AmbatkarPas encore d'évaluation
- Power Dissipation DerivationDocument11 pagesPower Dissipation DerivationHarshal AmbatkarPas encore d'évaluation
- RTL Synthesis: Choice-1: Target Expression-1 Choice-2: Target Expression-2 Choice-N: Target Expression-NDocument2 pagesRTL Synthesis: Choice-1: Target Expression-1 Choice-2: Target Expression-2 Choice-N: Target Expression-NHarshal AmbatkarPas encore d'évaluation
- Pedram 1Document15 pagesPedram 1Harshal AmbatkarPas encore d'évaluation
- Buffer - How To Find Setup Time and Hol..Document7 pagesBuffer - How To Find Setup Time and Hol..Harshal AmbatkarPas encore d'évaluation
- Bidirectional BusDocument1 pageBidirectional BusHarshal AmbatkarPas encore d'évaluation
- 8085 μP Architecture and Pin detailsDocument21 pages8085 μP Architecture and Pin detailsHarshal AmbatkarPas encore d'évaluation
- DFTDocument3 pagesDFTHarshal AmbatkarPas encore d'évaluation
- Corrected CodeDocument4 pagesCorrected CodeHarshal AmbatkarPas encore d'évaluation
- RTL inDocument1 pageRTL inHarshal AmbatkarPas encore d'évaluation
- Pages From ASIC Flow DiagramDocument1 pagePages From ASIC Flow DiagramHarshal AmbatkarPas encore d'évaluation
- Microprocessor FileDocument93 pagesMicroprocessor FileHarshal AmbatkarPas encore d'évaluation
- Combinational Functions SynthesisDocument2 pagesCombinational Functions SynthesisHarshal AmbatkarPas encore d'évaluation
- LibrariesDocument3 pagesLibrariesHarshal Ambatkar100% (1)
- Void Main Int I WhileDocument1 pageVoid Main Int I WhileHarshal AmbatkarPas encore d'évaluation
- AFD Assignment (2k15VLS02) Harshal 7Document1 pageAFD Assignment (2k15VLS02) Harshal 7Harshal AmbatkarPas encore d'évaluation
- AFD Assignment (2k15VLS02) Harshal 8Document1 pageAFD Assignment (2k15VLS02) Harshal 8Harshal AmbatkarPas encore d'évaluation
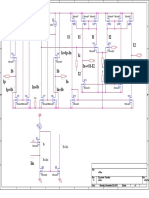
- Schematic Diagrams of CMOS-Based CDTA and CDTA-Based KHN FilterDocument1 pageSchematic Diagrams of CMOS-Based CDTA and CDTA-Based KHN FilterHarshal AmbatkarPas encore d'évaluation
- AFD Assignment (2k15VLS02) Harshal 4Document1 pageAFD Assignment (2k15VLS02) Harshal 4Harshal AmbatkarPas encore d'évaluation
- AFD Assignment (2k15VLS02) Harshal 5Document1 pageAFD Assignment (2k15VLS02) Harshal 5Harshal AmbatkarPas encore d'évaluation
- AFD Assignment (2k15VLS02) Harshal 3Document1 pageAFD Assignment (2k15VLS02) Harshal 3Harshal AmbatkarPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Link Between Poverty and Childhood ObesityDocument16 pagesThe Link Between Poverty and Childhood Obesityaptx8989Pas encore d'évaluation
- Covid US 20200528Document25 pagesCovid US 20200528Gregorios Anton NugrohoPas encore d'évaluation
- Isc Sample Paper 2010 Mathematics 1Document5 pagesIsc Sample Paper 2010 Mathematics 1paras_puriPas encore d'évaluation
- Applied Mathematics For Engineering DesignDocument4 pagesApplied Mathematics For Engineering DesignERKATHIRPas encore d'évaluation
- Financial Performance Evaluation of Some Selected Jordanian Commercial BanksDocument14 pagesFinancial Performance Evaluation of Some Selected Jordanian Commercial BanksAtiaTahiraPas encore d'évaluation
- Financial Risk and ReturnDocument37 pagesFinancial Risk and ReturnSanjay MehrotraPas encore d'évaluation
- Non-Performing Assets: A Comparative Study of SBI & ICICI Bank From (2014-2017)Document32 pagesNon-Performing Assets: A Comparative Study of SBI & ICICI Bank From (2014-2017)Alok NayakPas encore d'évaluation
- Sem For DummiesDocument28 pagesSem For DummiesManuel Recio MenendezPas encore d'évaluation
- Research MethodologyDocument342 pagesResearch MethodologyYogesh Kedar50% (2)
- Statistics For Business and Economics: Describing Data: NumericalDocument55 pagesStatistics For Business and Economics: Describing Data: NumericalTawanda MaherePas encore d'évaluation
- Catalog Maintenance of Low-Earth-Orbit Satellites - Principles of The AlgorithmDocument14 pagesCatalog Maintenance of Low-Earth-Orbit Satellites - Principles of The AlgorithmAlvin RodriguezPas encore d'évaluation
- Two-stage Cluster Sampling Design and AnalysisDocument119 pagesTwo-stage Cluster Sampling Design and AnalysisZahra HassanPas encore d'évaluation
- STA 2023 CRN 81075 Fall 2021 SyllabusDocument13 pagesSTA 2023 CRN 81075 Fall 2021 SyllabusJOSHUA NAZARIOPas encore d'évaluation
- A Powerpoint®-Based Guide To Assist in Choosing The Suitable Statistical TestDocument43 pagesA Powerpoint®-Based Guide To Assist in Choosing The Suitable Statistical TestsathyachellyPas encore d'évaluation
- Cavite State University (Cvsu) Don Severino de Las Alas CampusDocument2 pagesCavite State University (Cvsu) Don Severino de Las Alas CampusDeserie Mae Cahutay0% (1)
- Correlation CoefficeintDocument2 pagesCorrelation CoefficeintKiran BasuPas encore d'évaluation
- Survey Method in Educational PsychologyDocument7 pagesSurvey Method in Educational PsychologyIJRASETPublicationsPas encore d'évaluation
- From Consumer Satisfaction To Recommendation of Mobile App-Based Services An Overview of Mobile Taxi Booking AppsDocument14 pagesFrom Consumer Satisfaction To Recommendation of Mobile App-Based Services An Overview of Mobile Taxi Booking AppsRobPas encore d'évaluation
- 7 (2) Normal Functional Range of Motion of The Cervical SpineDocument7 pages7 (2) Normal Functional Range of Motion of The Cervical SpineirmarizkyyPas encore d'évaluation
- Employee Absenteeism A Review of The LitDocument25 pagesEmployee Absenteeism A Review of The LitAbdul Maroof KochaiPas encore d'évaluation
- A Comparative Analysis of Fabric Tear Strength Testing MethodsDocument6 pagesA Comparative Analysis of Fabric Tear Strength Testing MethodsLow Kah ZhoyPas encore d'évaluation
- A Study On Stock and Investment Decision Using Fundamental and Technical AnalysisDocument12 pagesA Study On Stock and Investment Decision Using Fundamental and Technical AnalysispavithragowthamnsPas encore d'évaluation
- Educational Research Methods: Dr. K. A. Korb University of JosDocument61 pagesEducational Research Methods: Dr. K. A. Korb University of JosArum NismaPas encore d'évaluation
- SPE 102093 Pore Perm RelationshipDocument9 pagesSPE 102093 Pore Perm RelationshipzztannguyenzzPas encore d'évaluation
- Thesis Version 2Document248 pagesThesis Version 2Jordan DilagPas encore d'évaluation
- Ewu Bba Program Course Cataloge With DescriptionDocument6 pagesEwu Bba Program Course Cataloge With DescriptionSaifulRony0% (1)
- 259 PDFDocument6 pages259 PDFbgvtPas encore d'évaluation
- Vargas and Mann 2013 Caldas Tear BullSeismSocAmerDocument22 pagesVargas and Mann 2013 Caldas Tear BullSeismSocAmerLuisa CallejasPas encore d'évaluation
- QMM 1Document18 pagesQMM 1Ravi ReddyPas encore d'évaluation
- Impact of Liquidity On Profitability of Nepalese Commercial BanksDocument8 pagesImpact of Liquidity On Profitability of Nepalese Commercial BanksWelcome BgPas encore d'évaluation