Vous aimerez peut-être aussi
- DB Wiring DiagramDocument1 pageDB Wiring DiagrammhofuPas encore d'évaluation
- 8Document15 pages8api-3696315Pas encore d'évaluation
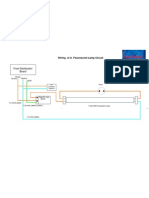
- Wiring of A Fluorescent Lamp CircuitDocument1 pageWiring of A Fluorescent Lamp CircuitRoland NnadiPas encore d'évaluation
- Sub Circuit Wiring PDFDocument1 pageSub Circuit Wiring PDFHatem HusseinPas encore d'évaluation
- EE362L Lab 2 Solar Power: Clayton Stice - Member, IEEE, UT EE Energy SystemsDocument3 pagesEE362L Lab 2 Solar Power: Clayton Stice - Member, IEEE, UT EE Energy SystemsadauPas encore d'évaluation
- A New Approach To Microfinance Biogas in IndiaDocument17 pagesA New Approach To Microfinance Biogas in IndiaMohit Sharma100% (9)
- StudyGuide IndustrialElectricianDocument29 pagesStudyGuide IndustrialElectricianSolomon Banteywalu50% (2)
- ContactorDocument1 pageContactorSolomon BanteywaluPas encore d'évaluation
- Wiring Diagram For 1 Ph. Dol Water Pump: Float Switch Sump Tank Float Switch StoragetankDocument1 pageWiring Diagram For 1 Ph. Dol Water Pump: Float Switch Sump Tank Float Switch StoragetankSolomon BanteywaluPas encore d'évaluation
- Circuit Protection DevicesDocument6 pagesCircuit Protection DevicesSolomon BanteywaluPas encore d'évaluation
- Model Solar Car DesignDocument21 pagesModel Solar Car DesignSemih HürmeydanPas encore d'évaluation
- Alternative Energy SystemDocument21 pagesAlternative Energy SystemSolomon BanteywaluPas encore d'évaluation
- زبدة المحركاتDocument22 pagesزبدة المحركاتfresh_soul20208212Pas encore d'évaluation
- Circuit Protection DevicesDocument6 pagesCircuit Protection DevicesSolomon BanteywaluPas encore d'évaluation
- Design GuideDocument152 pagesDesign GuideSolomon BanteywaluPas encore d'évaluation
- HPC Structural Designers GuideDocument128 pagesHPC Structural Designers Guideapi-3698973100% (4)
- Computer Methods in Power System Analysis by G.W. Stagg & A.H. El-AbiadDocument438 pagesComputer Methods in Power System Analysis by G.W. Stagg & A.H. El-Abiadkalonchito88% (17)
- 05a Unit CommitmentDocument53 pages05a Unit CommitmentZeeshan WaqasPas encore d'évaluation
- GTZ Low Cost Housing Technical Manual Volume-IDocument0 pageGTZ Low Cost Housing Technical Manual Volume-ISolomon BanteywaluPas encore d'évaluation
- Transient AnalysisDocument21 pagesTransient AnalysisSolomon BanteywaluPas encore d'évaluation
- Lesson 2Document21 pagesLesson 2api-3696315Pas encore d'évaluation
- 06 OpfDocument50 pages06 OpfRudra Kumar MishraPas encore d'évaluation
- Nuclear Power PlantDocument5 pagesNuclear Power PlantSolomon BanteywaluPas encore d'évaluation
- Thermal Power PlantDocument8 pagesThermal Power PlantSolomon BanteywaluPas encore d'évaluation
- On-Load Flow ControlDocument174 pagesOn-Load Flow ControlSolomon BanteywaluPas encore d'évaluation
- Load-Flow StudiesDocument12 pagesLoad-Flow StudiesNanda KiranPas encore d'évaluation
- Abstract, AcknowledgemenDocument12 pagesAbstract, AcknowledgemenSolomon BanteywaluPas encore d'évaluation
- Ce 05013 2Document28 pagesCe 05013 2ssebastian8177Pas encore d'évaluation
- Introduction PDFDocument4 pagesIntroduction PDFSolomon BanteywaluPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Ap5101 SensorsDocument1 pageAp5101 SensorsJasmine KPas encore d'évaluation
- Protem d404pdf Rele Temperatura de TrafosDocument16 pagesProtem d404pdf Rele Temperatura de TrafosIvan FrancoPas encore d'évaluation
- DC Shunt Motor Speed and Torque CharacteristicsDocument9 pagesDC Shunt Motor Speed and Torque CharacteristicsEric CalejaPas encore d'évaluation
- Expt. No.: ExperimentDocument3 pagesExpt. No.: ExperimentSwapnil DeyPas encore d'évaluation
- Pe Lab PDFDocument92 pagesPe Lab PDFVenkateshSrinivasanPas encore d'évaluation
- NHXMH J o CableDocument3 pagesNHXMH J o CableharmlesdragonPas encore d'évaluation
- RANCO Pressure-SwitchesDocument1 pageRANCO Pressure-SwitchesJose Lorenzo ToralPas encore d'évaluation
- ROBO234 Problem Set # 3 Solutions Rev2.1Document3 pagesROBO234 Problem Set # 3 Solutions Rev2.1Amol MiglaniPas encore d'évaluation
- Parts list with ceramic capacitors and resistorsDocument12 pagesParts list with ceramic capacitors and resistorsMaycon DouglasPas encore d'évaluation
- Files For YouDocument66 pagesFiles For YouGi BoPas encore d'évaluation
- UJT-Uni Junction Transistors: A Low-Cost Switching DeviceDocument3 pagesUJT-Uni Junction Transistors: A Low-Cost Switching DeviceIsaiah AlexanderPas encore d'évaluation
- Digital Temperature Controller Selectron DTC503 203 303Document1 pageDigital Temperature Controller Selectron DTC503 203 303industrialindiaPas encore d'évaluation
- Capacitor Types - An Overview of Different CapacitorsDocument33 pagesCapacitor Types - An Overview of Different CapacitorsReena KuttyPas encore d'évaluation
- DTR ZSP-41Document5 pagesDTR ZSP-41AdrianPas encore d'évaluation
- Teori MSTEPDocument144 pagesTeori MSTEPDaniel Sopian FernandesPas encore d'évaluation
- Final End 2-Mathayom 3 ScienceDocument10 pagesFinal End 2-Mathayom 3 ScienceAbdullohPas encore d'évaluation
- Injetor Seguidor de SinalDocument12 pagesInjetor Seguidor de SinalLuiz Henrique SantosPas encore d'évaluation
- How To Make Solenoid at Home?: InstructablesDocument4 pagesHow To Make Solenoid at Home?: InstructablesClóvis MorPas encore d'évaluation
- POWRGARD Electrical Product CatalogDocument248 pagesPOWRGARD Electrical Product CatalogEazy123Pas encore d'évaluation
- Dieseal Level ControllerDocument1 pageDieseal Level ControllersanjaybmscsePas encore d'évaluation
- Lab ManualDocument17 pagesLab ManualSatyam Govila100% (1)
- Chapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneDocument46 pagesChapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneMuhammad R ShihadehPas encore d'évaluation
- OKI PULP & PAPER MILL PROJECT SUMMARY WEEKLYDocument4 pagesOKI PULP & PAPER MILL PROJECT SUMMARY WEEKLYKusnadi AnginPas encore d'évaluation
- Abb AmvacDocument50 pagesAbb AmvacvjrPas encore d'évaluation
- SLD of Solar Park Pooling SS R1 121111 (2) - Model (1) .pdfBIRENDocument1 pageSLD of Solar Park Pooling SS R1 121111 (2) - Model (1) .pdfBIRENhamirPas encore d'évaluation
- High Voltage Fast-Switching NPN Power Transistor: Absolute Maximum RatingsDocument6 pagesHigh Voltage Fast-Switching NPN Power Transistor: Absolute Maximum RatingsDiego SerranoPas encore d'évaluation
- Isolated IGBT Gate-Drive Push-Pull Power Supply With 4 OutputsDocument43 pagesIsolated IGBT Gate-Drive Push-Pull Power Supply With 4 OutputsRenePas encore d'évaluation
- Materials System SpecificationDocument26 pagesMaterials System SpecificationEagle SpiritPas encore d'évaluation
- Assessment 1 - Questioning - Written Assessment - AURETR129Document22 pagesAssessment 1 - Questioning - Written Assessment - AURETR129Sana SiddiquePas encore d'évaluation
- Installation and Commissioning Manual Bay Control IED REC670Document166 pagesInstallation and Commissioning Manual Bay Control IED REC670Nenad VeselinovPas encore d'évaluation