Vous aimerez peut-être aussi
- L. Cedolin - Appunti Di Lezione Su Gusci Cilindrici e Sferici - Cap. 1Document21 pagesL. Cedolin - Appunti Di Lezione Su Gusci Cilindrici e Sferici - Cap. 1Giorgio RivaPas encore d'évaluation
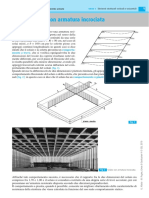
- Solai Solette Armatura Incrociata PDFDocument10 pagesSolai Solette Armatura Incrociata PDFAleksiey PellicciaPas encore d'évaluation
- Esercizio 2 InstabilitàDocument31 pagesEsercizio 2 InstabilitàMarco Raneo PezzanoPas encore d'évaluation
- 06 Costruzione Di Ponti 2007-08 Rev1Document16 pages06 Costruzione Di Ponti 2007-08 Rev1parcia90Pas encore d'évaluation
- Steel StructuresDocument38 pagesSteel Structuresbosnia76Pas encore d'évaluation
- Tecnica Delle Costruzioni PIASTREDocument37 pagesTecnica Delle Costruzioni PIASTREDoulgorikyPas encore d'évaluation
- Progetto PonteDocument46 pagesProgetto PonteRobert VochescuPas encore d'évaluation
- Teoria Delle Piastre InflesseDocument57 pagesTeoria Delle Piastre InflesseGiuseppe GentilePas encore d'évaluation
- Volte Sottili Areticolari DelGuerraDocument37 pagesVolte Sottili Areticolari DelGuerraPriscilla CombsPas encore d'évaluation
- Elementi Di PiastraDocument18 pagesElementi Di PiastraD'Armi StefanoPas encore d'évaluation
- Appunti Muro Di SostegnoDocument18 pagesAppunti Muro Di SostegnoGianluca de RisiPas encore d'évaluation
- Progetto Con Modelli Tirante-PuntoneDocument102 pagesProgetto Con Modelli Tirante-PuntoneGiuseppe GentilePas encore d'évaluation
- Cerchio Di MohrDocument36 pagesCerchio Di Mohrromario9Pas encore d'évaluation
- Trave Su Suolo ElasticoDocument10 pagesTrave Su Suolo ElasticoPaoloGavardiPas encore d'évaluation
- 10 Costruzione Di Ponti 2007-08 Rev0Document22 pages10 Costruzione Di Ponti 2007-08 Rev0GuillaumeHNOPas encore d'évaluation
- 08 Costruzione Di Ponti 2007-08 Rev0Document20 pages08 Costruzione Di Ponti 2007-08 Rev0GuillaumeHNOPas encore d'évaluation
- Cupole Lezione26032013 PDFDocument34 pagesCupole Lezione26032013 PDFMarco Francesco FunariPas encore d'évaluation
- 2011-11-23 Orlando Esempio CapannoneDocument82 pages2011-11-23 Orlando Esempio CapannoneLucaRampiniPas encore d'évaluation
- Giangreco PDFDocument298 pagesGiangreco PDFFrancesco MontagnoliPas encore d'évaluation
- 04 Costruzione Di Ponti 2008-09 Rev.0Document47 pages04 Costruzione Di Ponti 2008-09 Rev.0GuillaumeHNOPas encore d'évaluation
- L'Analisi Strutturale Delle Costruzioni in MuraturaDocument20 pagesL'Analisi Strutturale Delle Costruzioni in MuraturaPaolo BirattaPas encore d'évaluation
- Strutture Antisismiche in Acciaio PDFDocument126 pagesStrutture Antisismiche in Acciaio PDFGiuseppe GentilePas encore d'évaluation
- Progettazione Di Un Plinto Di Fondazione in C.A PDFDocument16 pagesProgettazione Di Un Plinto Di Fondazione in C.A PDFNiccolòPas encore d'évaluation
- 06 COSTRUZIONE DI PONTI 2007-08 Rev1 PDFDocument16 pages06 COSTRUZIONE DI PONTI 2007-08 Rev1 PDFGuillaumeHNOPas encore d'évaluation
- Vulnerabilità Ponti MuraturaDocument135 pagesVulnerabilità Ponti MuraturaFouad KehilaPas encore d'évaluation
- Fondazioni 2Document26 pagesFondazioni 2TommasoDominatoPas encore d'évaluation
- Sequenza Tesatura StralliDocument8 pagesSequenza Tesatura StralliAnonymous efXzvzOVPas encore d'évaluation
- 04 Dispense OndeDocument37 pages04 Dispense OndeMassimilianoTerenziPas encore d'évaluation
- Ponti StrallatiDocument78 pagesPonti StrallatiGiovanni Govdòn BugliPas encore d'évaluation
- Strutture in AcciaioDocument11 pagesStrutture in AcciaioEmanuele MastrangeloPas encore d'évaluation
- Dilatazione TermicaDocument14 pagesDilatazione TermicaIl Conte CamiPas encore d'évaluation
- 17-Solai Misti Legno Calcestruzzo Metodi Di VerificaDocument19 pages17-Solai Misti Legno Calcestruzzo Metodi Di Verificamich7bellPas encore d'évaluation
- 23 Lucidi LastreDocument32 pages23 Lucidi Lastreantonioviton07vkPas encore d'évaluation
- 02b TECNICA 2012-13 Rev1.0Document24 pages02b TECNICA 2012-13 Rev1.0GuillaumeHNOPas encore d'évaluation
- ImpalcatiDocument6 pagesImpalcatiVangjush MbricePas encore d'évaluation
- Progetto Travata Taglio-DuttilitàDocument41 pagesProgetto Travata Taglio-DuttilitàGiancarlo MarcariPas encore d'évaluation
- Teoria e Progetto Di Ponti Colonna Modello PDFDocument18 pagesTeoria e Progetto Di Ponti Colonna Modello PDFlinus18Pas encore d'évaluation
- Linee Di Influenza 2 PDFDocument8 pagesLinee Di Influenza 2 PDFShadiPas encore d'évaluation
- Milani CinematismiDocument84 pagesMilani CinematismivadalePas encore d'évaluation
- Dispensa Archi Corretta 20 - 06 - 2013 PDFDocument32 pagesDispensa Archi Corretta 20 - 06 - 2013 PDFVeraniJPas encore d'évaluation
- Costruzione Dominio Di Interazione 2Document37 pagesCostruzione Dominio Di Interazione 2Matteo MessinaPas encore d'évaluation
- Teoria Delle LastreDocument26 pagesTeoria Delle Lastrefrank_the_bangPas encore d'évaluation
- Costruzioni Di AcciaioDocument28 pagesCostruzioni Di AcciaioMario MereniPas encore d'évaluation
- Verifica Di Un Edificio in Muratura. Relazione TecnicaDocument55 pagesVerifica Di Un Edificio in Muratura. Relazione TecnicaBruno Savino MasciandaroPas encore d'évaluation
- Teoria Della PlasticitaDocument20 pagesTeoria Della PlasticitaDorian VitoPas encore d'évaluation
- 3 Rotazione Alla Corda Siracusa Aprile 2011 ColoreDocument32 pages3 Rotazione Alla Corda Siracusa Aprile 2011 Colorebosnia76Pas encore d'évaluation
- 20 Lezione 18 Gusci - 492..524 PDFDocument33 pages20 Lezione 18 Gusci - 492..524 PDFElvira VallarioPas encore d'évaluation
- WWW - Stru.polimi - It - Home - Malerba - Bacheca - PONTI A.A. 2011-12-2 NORME CARICHI SUI PONTI-1Document21 pagesWWW - Stru.polimi - It - Home - Malerba - Bacheca - PONTI A.A. 2011-12-2 NORME CARICHI SUI PONTI-1RO Man100% (1)
- Esercizi Con Soluzioni Di Fondamenti 1Document15 pagesEsercizi Con Soluzioni Di Fondamenti 1Hiago MonteiroPas encore d'évaluation
- Le Strutture Di Copertura Degli Edifici in Zona Sismica - Di FuscoDocument7 pagesLe Strutture Di Copertura Degli Edifici in Zona Sismica - Di FuscoSteel_catPas encore d'évaluation
- Influenza Della Modellazione Nell'Analisi Strutturale Di Un Cassone Da PonteDocument8 pagesInfluenza Della Modellazione Nell'Analisi Strutturale Di Un Cassone Da PontelucasgambiPas encore d'évaluation
- Dighe - IntroduzioneDocument8 pagesDighe - Introduzionesandroxxx_Pas encore d'évaluation
- MagliuloDocument52 pagesMagliulobosnia76Pas encore d'évaluation
- C.A.P. Isaia ClementeDocument70 pagesC.A.P. Isaia ClementeAntonio BevilacquaPas encore d'évaluation
- Domini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificateD'EverandDomini di resistenza in pressoflessione deviata per sezioni in c.a.: procedura parametrica per il tracciamento e confronti con formulazioni semplificatePas encore d'évaluation
- Complementi Di Scienza Delle CostruzioniDocument69 pagesComplementi Di Scienza Delle CostruzioniSalvatore Di PasqualePas encore d'évaluation
- Tecnica Delle Fondazioni - Parte 3 - Interazione Struttura-TerrenoDocument19 pagesTecnica Delle Fondazioni - Parte 3 - Interazione Struttura-TerrenoNicolaPas encore d'évaluation
- Suolo Elastico Alla WinklerDocument7 pagesSuolo Elastico Alla Winkleralbi6990Pas encore d'évaluation
- LEZIONE 4 - Local EffectDocument24 pagesLEZIONE 4 - Local EffectLuca Dal MolinPas encore d'évaluation
- Cr470 Costi Terremoto 59a5dDocument21 pagesCr470 Costi Terremoto 59a5dMarco FasanPas encore d'évaluation
- CRESME RischiosismicoDocument284 pagesCRESME RischiosismicoMarco FasanPas encore d'évaluation
- 3 - Fondazioni SuperficialiDocument97 pages3 - Fondazioni SuperficialiMarco FasanPas encore d'évaluation
- 2 Parametri-CaratteristiciDocument27 pages2 Parametri-CaratteristiciMarco FasanPas encore d'évaluation
- Dispensa Nodi UnisiderDocument221 pagesDispensa Nodi UnisiderMarco FasanPas encore d'évaluation
- Dispensa Del Corso Di Costruzioni in Acciaio IDocument180 pagesDispensa Del Corso Di Costruzioni in Acciaio IMarco FasanPas encore d'évaluation
- Telaio Giunti Semi-RigidiDocument89 pagesTelaio Giunti Semi-RigidiMarco Fasan100% (1)