Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Bible Does Not Condemn Premarital SexDocument16 pagesThe Bible Does Not Condemn Premarital SexKeith502100% (3)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Tamil Ilakkanam Books For TNPSCDocument113 pagesTamil Ilakkanam Books For TNPSCkk_kamalakkannan100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- CDT 2019 - Dental Procedure Code - American Dental AssociationDocument195 pagesCDT 2019 - Dental Procedure Code - American Dental AssociationJack50% (2)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Quarter 2-Module 7 Social and Political Stratification: Department of Education Republic of The PhilippinesDocument21 pagesQuarter 2-Module 7 Social and Political Stratification: Department of Education Republic of The Philippinestricia100% (5)
- Chemiphase Oilfield Demulsifier Testing ProcedureDocument4 pagesChemiphase Oilfield Demulsifier Testing ProcedureBen Wiggins100% (1)
- (Kre?Imir Petkovi?) Discourses On Violence andDocument610 pages(Kre?Imir Petkovi?) Discourses On Violence andGelazul100% (1)
- Modbus Application Protocol V1 1b3Document50 pagesModbus Application Protocol V1 1b3cjalanisPas encore d'évaluation
- Elementary SurveyingDocument19 pagesElementary SurveyingJefferson EscobidoPas encore d'évaluation
- Net Modbus TCP s7-1500 s7-1200 enDocument25 pagesNet Modbus TCP s7-1500 s7-1200 enCarlos MolinaPas encore d'évaluation
- AdapTel. System Planner - EN - v1.4Document27 pagesAdapTel. System Planner - EN - v1.4Cristian ProbostePas encore d'évaluation
- DI-9700TM IP Network Remote MicrophoneDocument2 pagesDI-9700TM IP Network Remote MicrophoneCristian ProbostePas encore d'évaluation
- Switch Core - DH-PFS4218-16ET-190Document3 pagesSwitch Core - DH-PFS4218-16ET-190Cristian ProbostePas encore d'évaluation
- Monitor - DAH 10 197Document2 pagesMonitor - DAH 10 197Cristian ProbostePas encore d'évaluation
- 2-Port H.323 / Sip Voip Gateway: Key FeatureDocument2 pages2-Port H.323 / Sip Voip Gateway: Key FeatureCristian ProbostePas encore d'évaluation
- Ruggedcom Multi-Service Platforms Ordering Overview: Modular Managed Layer 2 and 3 Ethernet Switches and RoutersDocument24 pagesRuggedcom Multi-Service Platforms Ordering Overview: Modular Managed Layer 2 and 3 Ethernet Switches and RoutersCristian ProbostePas encore d'évaluation
- IPC-HFW3441T-ZAS Datasheet 20210329Document3 pagesIPC-HFW3441T-ZAS Datasheet 20210329Cristian ProbostePas encore d'évaluation
- Peering HT8XX With HT813Document9 pagesPeering HT8XX With HT813Cristian ProbostePas encore d'évaluation
- IKS-6726A Series: 24+2g-Port Modular Managed Ethernet SwitchesDocument7 pagesIKS-6726A Series: 24+2g-Port Modular Managed Ethernet SwitchesCristian ProbostePas encore d'évaluation
- DH-HAC-HFW1400D: 4MP HDCVI IR Bullet CameraDocument3 pagesDH-HAC-HFW1400D: 4MP HDCVI IR Bullet CameraCristian ProbostePas encore d'évaluation
- Iec-61850Document40 pagesIec-61850Cristian ProbostePas encore d'évaluation
- Ucc1497 01Document167 pagesUcc1497 01Cristian ProbostePas encore d'évaluation
- Manual Da Soft Starter Da ABB Modelo PSE 300Document110 pagesManual Da Soft Starter Da ABB Modelo PSE 300Laurimar Vendrusculo100% (1)
- Dhi-Xvr4104 4108 4116hs-s2 Datasheet20170929Document3 pagesDhi-Xvr4104 4108 4116hs-s2 Datasheet20170929anon_22505120Pas encore d'évaluation
- DB 224 Data Sheet (Andrew)Document2 pagesDB 224 Data Sheet (Andrew)arcepedro100% (2)
- Toward Using Node Mobility To Enhance Greedy Forwarding in Geographic Routing For Mobile Ad Hoc NetworksDocument26 pagesToward Using Node Mobility To Enhance Greedy Forwarding in Geographic Routing For Mobile Ad Hoc NetworksCristian ProbostePas encore d'évaluation
- ATV600 EthernetIP Modbus TCP Manual en EAV64328 03Document156 pagesATV600 EthernetIP Modbus TCP Manual en EAV64328 03Khaled SalahuddeenPas encore d'évaluation
- Dheqacce6762 Dah DVR XVR 16ch Xvr4116hs s2Document3 pagesDheqacce6762 Dah DVR XVR 16ch Xvr4116hs s2Cristian ProbostePas encore d'évaluation
- TOSR0X-T User Manual PDFDocument27 pagesTOSR0X-T User Manual PDFYuriy YatsyshynPas encore d'évaluation
- 99FT4097 3459501Document105 pages99FT4097 3459501Cristian ProbostePas encore d'évaluation
- Mototrbo Data Apps Spec SheetDocument2 pagesMototrbo Data Apps Spec SheetCristian ProbostePas encore d'évaluation
- Intelligent Detectors and Bases: Detectors: V-PS, V-PHS, V-HFD, V-HRD Bases: B4U, RB4U, IB4U, SB4UDocument4 pagesIntelligent Detectors and Bases: Detectors: V-PS, V-PHS, V-HFD, V-HRD Bases: B4U, RB4U, IB4U, SB4UCristian ProbostePas encore d'évaluation
- Intelligent Detectors and Bases: Detectors: V-PS, V-PHS, V-HFD, V-HRD Bases: B4U, RB4U, IB4U, SB4UDocument4 pagesIntelligent Detectors and Bases: Detectors: V-PS, V-PHS, V-HFD, V-HRD Bases: B4U, RB4U, IB4U, SB4UCristian ProbostePas encore d'évaluation
- PCB Relay G5laDocument4 pagesPCB Relay G5laRamón ColónPas encore d'évaluation
- Intelligent Detectors and Bases: Detectors: V-PS, V-PHS, V-HFD, V-HRD Bases: B4U, RB4U, IB4U, SB4UDocument4 pagesIntelligent Detectors and Bases: Detectors: V-PS, V-PHS, V-HFD, V-HRD Bases: B4U, RB4U, IB4U, SB4UCristian ProbostePas encore d'évaluation
- 3101831-En V3.5 vs-CU V3.5 and Firmware V2.3 Release NotesDocument6 pages3101831-En V3.5 vs-CU V3.5 and Firmware V2.3 Release NotesCristian ProbostePas encore d'évaluation
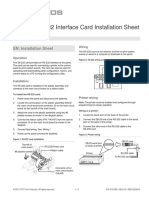
- R03 SA-232 RS-232 Interface Card Installation SheetDocument4 pagesR03 SA-232 RS-232 Interface Card Installation SheetCristian ProbostePas encore d'évaluation
- Manual Pull Stations: GSA-M270, GSA-M270P, GSA-M278Document4 pagesManual Pull Stations: GSA-M270, GSA-M270P, GSA-M278Cristian ProbostePas encore d'évaluation
- Full Download Social Animal 14th Edition Aronson Test BankDocument35 pagesFull Download Social Animal 14th Edition Aronson Test Banknaeensiyev100% (32)
- Design of Experiments: I. Overview of Design of Experiments: R. A. BaileyDocument18 pagesDesign of Experiments: I. Overview of Design of Experiments: R. A. BaileySergio Andrés Cabrera MirandaPas encore d'évaluation
- Grade 5 Forces Acting On Structures and Mechanisms CirriculumDocument3 pagesGrade 5 Forces Acting On Structures and Mechanisms Cirriculumapi-2072021750% (1)
- Customer Refund: Responsibility: Yodlee US AR Super User Navigation: Transactions TransactionsDocument12 pagesCustomer Refund: Responsibility: Yodlee US AR Super User Navigation: Transactions TransactionsAziz KhanPas encore d'évaluation
- Donor S Tax Exam AnswersDocument6 pagesDonor S Tax Exam AnswersAngela Miles DizonPas encore d'évaluation
- Activity Chapter1 ManagementDocument7 pagesActivity Chapter1 ManagementTricia Amigo SacarePas encore d'évaluation
- MISKDocument134 pagesMISKmusyokaPas encore d'évaluation
- Caltech RefDocument308 pagesCaltech RefSukrit ChatterjeePas encore d'évaluation
- FreeMarkets: Procurement & Outsourcing StrategiesDocument44 pagesFreeMarkets: Procurement & Outsourcing StrategiesFarhaad MohsinPas encore d'évaluation
- Humanistic Developmental Physiological RationalDocument10 pagesHumanistic Developmental Physiological RationalJin TippittPas encore d'évaluation
- Reaction PaperDocument3 pagesReaction PaperCecille Robles San JosePas encore d'évaluation
- INTRODUCTIONDocument1 pageINTRODUCTIONNabila Gaming09Pas encore d'évaluation
- Lesson I. Background InformationDocument21 pagesLesson I. Background InformationsuidivoPas encore d'évaluation
- Villegas vs. Subido - Case DigestDocument5 pagesVillegas vs. Subido - Case DigestLouvanne Jessa Orzales BesingaPas encore d'évaluation
- STEM BeesDocument36 pagesSTEM BeesHitesh YadavPas encore d'évaluation
- The Role of Financial System in DevelopmentDocument5 pagesThe Role of Financial System in DevelopmentCritical ThinkerPas encore d'évaluation
- 9.2 Volumetric Analysis PDFDocument24 pages9.2 Volumetric Analysis PDFJoaquinPas encore d'évaluation
- Adolescent Violence Towards Parents Myths and RealitiesDocument25 pagesAdolescent Violence Towards Parents Myths and RealitiesJoão D C MendonçaPas encore d'évaluation
- Different Departments Required in A HospitalDocument11 pagesDifferent Departments Required in A HospitalEdsel Dudes AbantePas encore d'évaluation
- Biometric Security ConcernsDocument27 pagesBiometric Security ConcernsprinceuchenduPas encore d'évaluation
- Bubble ColumnDocument34 pagesBubble ColumnihsanPas encore d'évaluation
- COMM 103 Floyd Chapters Study GuideDocument4 pagesCOMM 103 Floyd Chapters Study GuideMad BasblaPas encore d'évaluation
- Marriage Practices Among The Gidda Oromo, Northern Wollega, EthiopiaDocument2 pagesMarriage Practices Among The Gidda Oromo, Northern Wollega, Ethiopiajoseph mathewPas encore d'évaluation