Vous aimerez peut-être aussi
- Syllabus 6 EeeDocument11 pagesSyllabus 6 EeeSUMIT RAJPas encore d'évaluation
- Gujarat Technological University: Control Engineering Subject B.E. 5 SemesterDocument3 pagesGujarat Technological University: Control Engineering Subject B.E. 5 Semesterishan shahPas encore d'évaluation
- Gujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Document3 pagesGujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Mulu GirmayPas encore d'évaluation
- Linear System Analysis Course SyllabusDocument2 pagesLinear System Analysis Course SyllabusJaime MendezPas encore d'évaluation
- Control SystemsDocument160 pagesControl SystemsPintu DeyPas encore d'évaluation
- Course OutlineDocument2 pagesCourse OutlinearifulPas encore d'évaluation
- Signals, Spectra Syllabus PDFDocument2 pagesSignals, Spectra Syllabus PDFJeffreyBerida50% (2)
- Course OutlineDocument4 pagesCourse Outlinegui0381Pas encore d'évaluation
- 6th Sem EEE 18Document28 pages6th Sem EEE 18Iqbal Ahammed KaladgikarPas encore d'évaluation
- Course OutlineDocument4 pagesCourse OutlinedimakikilalaPas encore d'évaluation
- ME444 Mechanical Vibrations SyllabusDocument3 pagesME444 Mechanical Vibrations Syllabusselvithimmarajan@gmail.comPas encore d'évaluation
- Madda Walabu UniversityDocument2 pagesMadda Walabu UniversityAnonymous BwNzgX4hMvPas encore d'évaluation
- Feedback Control System SyllabusDocument3 pagesFeedback Control System SyllabusDamanMakhijaPas encore d'évaluation
- Briefguidetrc3600 Mae3408 s2 2018Document3 pagesBriefguidetrc3600 Mae3408 s2 2018Dan DMPas encore d'évaluation
- Course OutlineDocument3 pagesCourse OutlineJawwad AhmedPas encore d'évaluation
- CONTROL SYSTEMS (Core Subject) B.E., VI Semester, Electrical and Electronics Engineering (As Per Choice Based Credit System (CBCS) Scheme)Document2 pagesCONTROL SYSTEMS (Core Subject) B.E., VI Semester, Electrical and Electronics Engineering (As Per Choice Based Credit System (CBCS) Scheme)tabassPas encore d'évaluation
- Lesson Plan: EE 2253 Control SystemsDocument6 pagesLesson Plan: EE 2253 Control Systemsm_duraiPas encore d'évaluation
- Control Systems OverviewDocument3 pagesControl Systems OverviewSai tejaswiPas encore d'évaluation
- Istanbul Technical University Department of Mechanical Engineering System Dynamics and Control CourseDocument3 pagesIstanbul Technical University Department of Mechanical Engineering System Dynamics and Control CourseCeren ArpakPas encore d'évaluation
- M.SC - in Electrical and Comp Control EngDocument36 pagesM.SC - in Electrical and Comp Control EngIslam FattouhPas encore d'évaluation
- Introduction To Instrumentation and ControlDocument4 pagesIntroduction To Instrumentation and Controlsouvik5000Pas encore d'évaluation
- MachineDocument7 pagesMachineyogeshPas encore d'évaluation
- ECE 443 Control Systems Course SyllabusDocument5 pagesECE 443 Control Systems Course SyllabusMyca Mira100% (1)
- CS SyllabusDocument2 pagesCS SyllabusEEE ACEECPas encore d'évaluation
- SYSC 3610 Biomedical Systems ModelingDocument4 pagesSYSC 3610 Biomedical Systems ModelingAshraf maghPas encore d'évaluation
- Courses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Document20 pagesCourses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Vaibhav SinghPas encore d'évaluation
- Power Electronics and Power Systems Syllabus NewDocument49 pagesPower Electronics and Power Systems Syllabus NewsoorajthevallyPas encore d'évaluation
- Course Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilDocument2 pagesCourse Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilSUNOBHAIPas encore d'évaluation
- CIS Control Technology-Theory-Spring-2021Document6 pagesCIS Control Technology-Theory-Spring-2021mishal shakeelPas encore d'évaluation
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresD'EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresPas encore d'évaluation
- Control System Engineering: Course Context and Overview (100 Words)Document3 pagesControl System Engineering: Course Context and Overview (100 Words)MasterMM12Pas encore d'évaluation
- Power SystemsDocument54 pagesPower SystemsBindu ChipiriPas encore d'évaluation
- Me 455Document4 pagesMe 455Fatima ShahPas encore d'évaluation
- INSTRUCTION SET OF 8086: Data Transfer and ArithmeticDocument18 pagesINSTRUCTION SET OF 8086: Data Transfer and ArithmeticMallik KglPas encore d'évaluation
- NAU EE348 Course Teaches Signals, Systems and FiltersDocument4 pagesNAU EE348 Course Teaches Signals, Systems and Filtersservice5bPas encore d'évaluation
- Lcs 2016-Lecture Plan - FirstDocument4 pagesLcs 2016-Lecture Plan - Firstapi-306909084Pas encore d'évaluation
- Lovely Professional University, Punjab: Course No Cours Title Course Planner Lectures Tutorial Practical CreditsDocument6 pagesLovely Professional University, Punjab: Course No Cours Title Course Planner Lectures Tutorial Practical CreditsPraveen ChaudharyPas encore d'évaluation
- Intro To Tel 433Document2 pagesIntro To Tel 433TestimonyPas encore d'évaluation
- ECT307 CS SyllabusDocument10 pagesECT307 CS Syllabusjinto0007Pas encore d'évaluation
- Consolidated 5th Sem Scheme and Syllabus Updated0Document27 pagesConsolidated 5th Sem Scheme and Syllabus Updated0Kundan KumarPas encore d'évaluation
- W1 PDFDocument21 pagesW1 PDFShujah RashidPas encore d'évaluation
- Course Outline For RegulationDocument3 pagesCourse Outline For RegulationkebadsewPas encore d'évaluation
- EC305 ControlSystems SachitRao Aug2019Document3 pagesEC305 ControlSystems SachitRao Aug2019Akash PerlaPas encore d'évaluation
- Abet Syllabus FormatDocument3 pagesAbet Syllabus Formatfcb1138Pas encore d'évaluation
- EED-412 Slide Set-I - ShareDocument74 pagesEED-412 Slide Set-I - ShareDevangi ChoudharyPas encore d'évaluation
- Lect. No. Topic Learning Object(s) Ref. To Text Book/ Class NotesDocument3 pagesLect. No. Topic Learning Object(s) Ref. To Text Book/ Class NotesRaghav KomatiPas encore d'évaluation
- EE484 Control SystemsDocument2 pagesEE484 Control Systemssaheedahmd0112Pas encore d'évaluation
- EE-371 Linear Control Systems First Day HandoutDocument4 pagesEE-371 Linear Control Systems First Day HandoutMaham AslamPas encore d'évaluation
- Course OutlineDocument2 pagesCourse OutlinemerikoPas encore d'évaluation
- Control SystemsDocument2 pagesControl SystemsrahulwastherePas encore d'évaluation
- Download ebook Instrumentation And Control Systems Pdf full chapter pdfDocument67 pagesDownload ebook Instrumentation And Control Systems Pdf full chapter pdflola.roane470100% (27)
- Wollo University Signals and Systems CourseDocument2 pagesWollo University Signals and Systems CourseAwil MohamedPas encore d'évaluation
- MtechpscDocument48 pagesMtechpscAneesh KGPas encore d'évaluation
- Scheme & Syllabi ME (Power Systems) : (Revision of Syllabi For 15 Week Teaching)Document35 pagesScheme & Syllabi ME (Power Systems) : (Revision of Syllabi For 15 Week Teaching)SinghsaabPas encore d'évaluation
- Course Outcome (Control System)Document2 pagesCourse Outcome (Control System)priyanka1887Pas encore d'évaluation
- Fonasba Quality Standard Approvals GrantedDocument2 pagesFonasba Quality Standard Approvals GrantedM Faizan FarooqPas encore d'évaluation
- Digital Signal Processing AssignmentDocument5 pagesDigital Signal Processing AssignmentM Faizan FarooqPas encore d'évaluation
- FONASBA Quality Standard ApprovalsDocument4 pagesFONASBA Quality Standard ApprovalsM Faizan FarooqPas encore d'évaluation
- Lebanese Shipping Agencies Awarded FQSDocument3 pagesLebanese Shipping Agencies Awarded FQSM Faizan FarooqPas encore d'évaluation
- Pre Lab Tasks: Task # 01Document2 pagesPre Lab Tasks: Task # 01M Faizan FarooqPas encore d'évaluation
- Arc Flash AnalysisDocument3 pagesArc Flash AnalysisM Faizan FarooqPas encore d'évaluation
- Clean UpDocument1 pageClean UpM Faizan FarooqPas encore d'évaluation
- Fiv Elec ProjDocument4 pagesFiv Elec ProjM Faizan FarooqPas encore d'évaluation
- Task 060820Document2 pagesTask 060820M Faizan FarooqPas encore d'évaluation
- Testing and Commisioning of CB and Trans. LineDocument27 pagesTesting and Commisioning of CB and Trans. LineM Faizan FarooqPas encore d'évaluation
- Adding Button To Run Code VBADocument2 pagesAdding Button To Run Code VBAM Faizan FarooqPas encore d'évaluation
- DSP Lab4Document2 pagesDSP Lab4M Faizan FarooqPas encore d'évaluation
- Smashwords Macro v1Document3 pagesSmashwords Macro v1M Faizan FarooqPas encore d'évaluation
- EE6501 PSA Unit - IV Anna Univ Questions May 2011 - May 2015 05e7bDocument4 pagesEE6501 PSA Unit - IV Anna Univ Questions May 2011 - May 2015 05e7bM Faizan FarooqPas encore d'évaluation
- Teo 1997Document6 pagesTeo 1997M Faizan FarooqPas encore d'évaluation
- Assignment 1 SolutionDocument4 pagesAssignment 1 SolutionM Faizan FarooqPas encore d'évaluation
- DSP Lab6Document6 pagesDSP Lab6M Faizan FarooqPas encore d'évaluation
- Numerical RelayDocument15 pagesNumerical RelayM Faizan FarooqPas encore d'évaluation
- SimulationDocument2 pagesSimulationM Faizan FarooqPas encore d'évaluation
- NM Assignment Triangularization and Inv. MethodDocument2 pagesNM Assignment Triangularization and Inv. MethodM Faizan FarooqPas encore d'évaluation
- DSP Lab7 - 8Document8 pagesDSP Lab7 - 8M Faizan FarooqPas encore d'évaluation
- DP83848CDocument84 pagesDP83848CM Faizan FarooqPas encore d'évaluation
- Schematic diagram of Ethernet PHY moduleDocument1 pageSchematic diagram of Ethernet PHY moduleM Faizan FarooqPas encore d'évaluation
- MATLAB Control Systems LabDocument3 pagesMATLAB Control Systems LabM Faizan FarooqPas encore d'évaluation
- Power System Nagrath Kothari SolutionsDocument88 pagesPower System Nagrath Kothari SolutionsChandra Sekhar Chebiyyam81% (16)
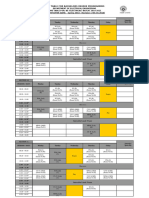
- Electrical Engineering TimetableDocument3 pagesElectrical Engineering TimetableM Faizan FarooqPas encore d'évaluation
- 054 Accounting ConceptsDocument3 pages054 Accounting ConceptsM Faizan FarooqPas encore d'évaluation
- 3525Document23 pages3525M Faizan FarooqPas encore d'évaluation
- Calculus SyllabusDocument7 pagesCalculus SyllabusRumarie de la CruzPas encore d'évaluation
- Fun The Mystery of The Missing Kit Maths AdventureDocument7 pagesFun The Mystery of The Missing Kit Maths AdventureJaredPas encore d'évaluation
- Exam Circular - HYE - C1 To 12, 2023-24Document26 pagesExam Circular - HYE - C1 To 12, 2023-24Aman ShethPas encore d'évaluation
- Métodos de Fı́sica Teórica II - CF367 Lista de Exercı́cios I Dirac delta function propertiesDocument1 pageMétodos de Fı́sica Teórica II - CF367 Lista de Exercı́cios I Dirac delta function propertiesFernando Bazílio de LimaPas encore d'évaluation
- Optimal f ratio for inverter chainDocument6 pagesOptimal f ratio for inverter chainVIKAS RAOPas encore d'évaluation
- A Generalization of The Ramanujan-Nagell EquationDocument12 pagesA Generalization of The Ramanujan-Nagell EquationHidden characterPas encore d'évaluation
- Beales MethodDocument38 pagesBeales MethodAbani100% (3)
- Hindu Temple Fractals - Vastu N Carl JungDocument31 pagesHindu Temple Fractals - Vastu N Carl JungDisha TPas encore d'évaluation
- G (X) F (X, Y) : Marginal Distributions Definition 5Document13 pagesG (X) F (X, Y) : Marginal Distributions Definition 5Kimondo KingPas encore d'évaluation
- Heat Transfer ME G533 Course OverviewDocument5 pagesHeat Transfer ME G533 Course OverviewramsastryPas encore d'évaluation
- Material Models in PlaxisDocument136 pagesMaterial Models in PlaxismpvfolloscoPas encore d'évaluation
- The Blow Cup ChallengeDocument9 pagesThe Blow Cup Challengeapi-459062106Pas encore d'évaluation
- Table of Common Laplace TransformsDocument2 pagesTable of Common Laplace TransformsJohn Carlo SacramentoPas encore d'évaluation
- Dissertation Actuarial ScienceDocument5 pagesDissertation Actuarial ScienceWriteMyPaperIn3HoursCanada100% (1)
- Taller 8Document2 pagesTaller 8monchito83hotmailesPas encore d'évaluation
- 2.161 Signal Processing: Continuous and Discrete: Mit OpencoursewareDocument14 pages2.161 Signal Processing: Continuous and Discrete: Mit Opencoursewarelovelyosmile253Pas encore d'évaluation
- 1ST Unit Test (2023-24)Document1 page1ST Unit Test (2023-24)Ansh ThakurPas encore d'évaluation
- PHAR 7633 Chapter 19 Multi-Compartment Pharmacokinetic ModelsDocument23 pagesPHAR 7633 Chapter 19 Multi-Compartment Pharmacokinetic ModelsBandameedi RamuPas encore d'évaluation
- Assignment 2Document2 pagesAssignment 2yathasamboPas encore d'évaluation
- Coding Area: Roman IterationDocument3 pagesCoding Area: Roman IterationPratyush GoelPas encore d'évaluation
- Quantitative Techniques for Management DecisionsDocument4 pagesQuantitative Techniques for Management DecisionsFiraa'ool Yusuf100% (1)
- Simulation of A Tank Fill by Volume of Fluid Method Using Ansys Fluent - Training, Projects & Research CenterDocument9 pagesSimulation of A Tank Fill by Volume of Fluid Method Using Ansys Fluent - Training, Projects & Research CenterHayderAlSamawiPas encore d'évaluation
- Vectors and TensorsDocument13 pagesVectors and TensorsNithinPas encore d'évaluation
- Aerodynamics MCQs on Low Speed AerodynamicsDocument4 pagesAerodynamics MCQs on Low Speed AerodynamicsHarish MathiazhahanPas encore d'évaluation
- Kindergarten 2D and 3D Shapes PDFDocument33 pagesKindergarten 2D and 3D Shapes PDFAibegim Abdyldabekova100% (1)
- Selection, Bubble, Insertion Sorts & Linear Binary Search ExplainedDocument5 pagesSelection, Bubble, Insertion Sorts & Linear Binary Search ExplainedAndrew MagdyPas encore d'évaluation
- Solid State PhysicsDocument281 pagesSolid State PhysicsChang Jae LeePas encore d'évaluation
- ECON 233-Introduction To Game Theory - Husnain Fateh AhmadDocument7 pagesECON 233-Introduction To Game Theory - Husnain Fateh AhmadAdeel ShaikhPas encore d'évaluation
- Prestressed Concrete: A Fundamental Approach, ACI 318-11 Code Philosophy & Stresses LimitationsDocument14 pagesPrestressed Concrete: A Fundamental Approach, ACI 318-11 Code Philosophy & Stresses LimitationsAnmar Al-AdlyPas encore d'évaluation
- F Distribution - TableDocument2 pagesF Distribution - TableanupkewlPas encore d'évaluation