Académique Documents
Professionnel Documents
Culture Documents
52450-Motores de Passo Atualizado
Transféré par
danitranoster8512Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
52450-Motores de Passo Atualizado
Transféré par
danitranoster8512Droits d'auteur :
Formats disponibles
1
INSTITUTO FEDERAL DE EDUCAO, CINCIA E TECNOLOGIA DO CEAR
DEPARTAMENTO DA INDSTRIA
CLUDIO MARQUES DE S MEDEIROS
NOTAS DE AULA:
MOTORES DE RELUTNCIA VARIVEL
FORTALEZA
2009
2
1. Introduo
Os motores sncronos de relutncia varivel, apesar de terem sido concebidos no
sculo XIX, somente comearam a ter o seu potencial explorado a partir do
desenvolvimento da tecnologia dos semicondutores de potncia, dos microprocessadores e
dos mtodos de projetos de sistemas eletromagnticos assistidos por computao. Com
esses avanos, tais motores tm atingido performance a nvel competitivo aos acionamentos
com motores CC, CA e brushless CC .
O motor de relutncia varivel um motor de simples excitao e duplamente
saliente. Isso significa que apresenta plos salientes no estator e no rotor, mas que somente
apresenta bobinas no estator. O rotor no possui bobinas, m ou gaiola de esquilo, mas sim
uma pilha ( conjunto magntico ou stack ) de lminas de plos salientes feitas de
material ferromagntico.
A principal propriedade do motor de relutncia varivel a capacidade de produzir
incrementos de posio do eixo, de ngulo pr-determinado, quando da mudana da fase de
excitao. Este incremento no posicionamento do rotor obtido pelo alinhamento
magntico dos plos das partes estacionria e rotativa do motor ( ACARNLEY
[ ] 5
). A
afirmativa acima pressupe que o conjugado desenvolvido pela mquina bastante superior
ao conjugado da carga, possibilitando a operao em malha aberta. Sero abordados aqui os
motores de relutncia varivel de conjunto magntico simples ( single-stack ) e o de
conjunto magntico mltiplo ( multi-stack ).
3
1.1 Motor de Conjunto Magntico Simples
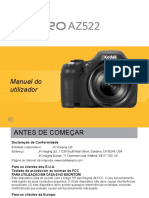
A figura 1.1 ilustra a seo transversal de um motor sncrono de relutncia varivel
de conjunto magntico simples.
FIGURA 1.1 - Seo transversal do motor de conjunto magntico simples.
A estrutura mostrada na figura 1.1 apresenta um estator com seis plos salientes ou
dentes, enquanto o rotor apresenta quatro plos. Existem seis bobinas, uma para cada plo
do estator, onde so ligadas em srie as que se encontram em plos opostos para formar
fluxo magntico radial. Com isso, tem-se trs fases, o nmero mnimo necessrio para
produzir rotao em dois sentidos. Para excitao de uma fase, o fluxo principal se fecha
atravs de um plo do estator, entreferro, um plo do rotor, o ncleo do rotor, o plo oposto
do rotor, entreferro, o plo oposto do estator e, finalmente, o ferro de estator, como mostra
a figura 1.1. Uma pequena poro do fluxo produzido pelas bobinas de fase se fecha por
plos de fases no excitadas, estabelecendo, dessa forma, um acoplamento mtuo entre as
fases ( ACARNLEY
[ ] 5
, GAYAKWAD & SOKOLOFF
[ ] 6
).
Rotaes no sentido horrio sero obtidas com excitao sequenciada da seguinte
forma : A, C, B, A, C, B, ... . Similarmente, rotaes no sentido anti-horrio sero obtidas
4
com a seguinte sequncia : A, B, C, A, B, C, ... . O movimento do motor se d no sentido
oposto a rotao do fluxo magntico.
O passo do motor de relutncia varivel de Conjunto Magntico Simples dado em
graus mecnicos pela expresso abaixo,
passo = 360 / N.p ( 1.1 )
onde,
N - nmero de fases do motor
p - nmero de dentes do rotor
Uma das caractersticas nicas dos motores de passo a possibilidade da realizao
de pequenos ngulos de passo. Um ngulo de passo de 30 realizado pela estrutura da
figura 1.1 no um ngulo pequeno.
Para reduzir o ngulo de passo, o nmero de dentes do rotor deve ser incrementado.
Embora o nmero de dentes do estator no esteja especificado na expresso acima, o
mesmo deve crescer para acompanhar o crescimento do nmero de dentes do rotor. A seo
transversal de um motor de relutncia varivel com um pequeno ngulo de passo
mostrada na figura 1.2.
FIGURA 1.2 - Seo transversal do motor de relutncia varivel tetrafsico.
As grandes pores salientes em torno das quais so enroladas as bobinas so
convencionalmente chamadas de plos. Um plo tem dois ou mais dentes estatricos, e
todos os dentes de um mesmo plo tm a mesma polaridade a cada instante. Desde que o
5
nmero de dentes do rotor 50 e o nmero de fases 4, o nmero de passos 200 e o
ngulo de passo 1.8.
1.2 Motor de Conjunto Magntico Mltiplo
O motor sncrono de relutncia varivel do tipo conjunto magntico mltiplo
composto axialmente por conjuntos magnticos formados pelo empilhamento de chapas de
material ferromagntico constituindo estruturas rotrica e estatrica independentes entre si
e isoladas magneticamente dos outros conjuntos magnticos, alm de um enrolamento
independente isolado no estator. A figura 1.3 mostra um motor com trs conjuntos
magnticos, onde se pode esperar que os fluxos magnticos mtuos sejam desprezveis
entre as trs fases.
FIGURA 1.3 - Motor de conjunto magntico mltiplo.
Observando a figura 1.4, a qual mostra cortes transversais ao eixo em trs conjuntos
magnticos, percebe-se que os plos do estator so dentados e que o nmero de dentes do
estator igual ao do rotor. O mecanismo que possibilita rotaes do eixo a existncia de
deslocamentos angulares entre os conjuntos magnticos de tal forma que estando uma fase
energizada os dentes da mesma esto alinhados enquanto os dentes das outras fases no
esto. Desenergizando o conjunto magntico alinhado e energizando o outro, haver
rotao do eixo na busca da condio de menor relutncia e o conjunto magntico
correspondente ter o alinhamento de suas estruturas rotricas e estatricas. No caso
mostrado na figura 1.4 o deslocamento angular entre os conjuntos magnticos de 120
( ACARNLEY
[ ] 5
, GAYAKWAD & SOKOLOFF
[ ] 6
).
Cada fase composta de um enrolamento contnuo que contempla todos os plos do
conjunto magntico e que, quando energizado, produz plos adjacentes opostos.
6
FIGURA 1.4 - Seo transversal do motor de conjunto magntico mltiplo.
O passo do motor de relutncia varivel de conjunto magntico mltiplo dado em
graus mecnicos, semelhante ao motor de conjunto magntico simples, pela expresso 1.1,
sendo que p representa o nmero de dentes do rotor contando-se os de todos os conjuntos
magnticos.
1.3 Outros Tipos de Motores de Passo
1.3.1 Motor de Passo Hbrido
O motor de passo hbrido combina as caractersticas do motor de m permanente
com as do motor de relutncia varivel. Como pode ser visto na figura 1.5 a seguir, a
construo de um motor de passo hbrido tpico inclui duas sees ( so possveis mais que
duas sees ) com um m axial entre as duas sees. Cada seo composta de um rotor
dentado e plos ( tambm dentados ) no estator com bobinas.
O nmero de dentes do rotor diferente do estator, em contraste com o motor de
relutncia varivel do tipo multi-stack , onde o nmero de dentes o mesmo. As sees
A e B so de construes idnticas, contudo, os dentes das duas sees estatricas esto
perfeitamente alinhados, e os dentes das duas sees rotricas esto desalinhados de meio
passo de dente rotrico. Para o motor apresentado na figura 1.5 o passo rotrico de
3 ( Pr = 360 / 2*30 ), logo, o desalinhamento de 1.5.
As bobinas de cada fase so distribudas entre os plos das duas sees. Como
mostrado na ilustrao, a fase 1 est enrolada nos plos 1, 3, 5 e 7 da seo A do estator e
7
nos plos 1, 3, 5 e 7 da seo B, e a fase 2 est distribuda nos plos 2, 4, 6 e 8 de ambas as
sees.
FIGURA 1.5 - Seo transversal do motor de passo hbrido.
O m permanente axial magnetiza o rotor da seo A com um plo norte e rotor da
seo B como um plo sul. A complexidade adicional devido a distribuio do
bobinamento entre as duas sees complica o circuito magntico, resultando num caminho
de fluxo radicalmente diferente de qualquer outro. A direo do fluxo atravs dos plos do
estator determinada pelas direes da magnetizao desses plos, as quais so ditadas
pelas correntes de fase aplicadas.
Considere que a fase 1 energizada pela corrente I1, aplicada na direo mostrada.
Os dentes do rotor da seo A esto alinhados com os dentes dos plos 1 e 5, e os da seo
B esto alinhados com os dentes dos plos 3 e 7. Como ilustrado na figura 1.6, o circuito
magntico toma o seguinte caminho: o fluxo do plo norte do m permanente entra no
8
rotor da seo A e sai atravs dos plos 1 e 5. O fluxo continua seu caminho ao longo da
carcaa e entra no rotor da seo B atravs dos plos 3 e 7, e ento completando o caminho
fechado com o plo sul do m permanente.
FIGURA 1.6 Circuito magntico do motor de passo Hbrido.
Para avanar o eixo do motor em um passo no sentido horrio, I1 deve ser removida
e I2 deve ser aplicada fase 2. Para entender a razo pela qual da fase 2 deve ser
energizada para produzir o movimento no sentido horrio, observe a posio dos dentes do
estator e do rotor em ambas as sees na figura 1.5. Observe os dentes enegrecidos como
referncia. Os dentes pretos so os que esto maio prximos do alinhamento com os dentes
dos plos estatricos 4 e 8 na seo A e plos 2 e 6 na seo B. No entanto, existe um
problema. Os plos 4 e 8 e os 2 e 6 estaro magnetizados na direo errada caso seja
mantida a direo de I2. Para resolver este problema, a direo de I2 deve ser revertida.
Uma seqncia completa de quatro passos para produzir movimento no sentido horrio
dada por 1+, 2-, 1-, 2+, 1+. Esta seqncia pode ser revertida para rotao no sentido anti-
horrio.
9
A inverso no sentido da corrente nas fases pode ser implementada com o uso de
um conversor em ponte H para cada uma das duas bobinas, havendo a necessidade do
emprego de oito dispositivos de chaveamento, o que encarece o acionamento. O mesmo
efeito pode ser alcanado com o uso de bobinamento bifilar, significando que em cada plo
h duas bobinas isoladas entre si e que ao serem percorridas por corrente, produziro fluxos
magnticos opostos. Para este tipo de bobinamento bastam quatro dispositivos de
chaveamento no conversor.
1.3.2 Motores de Passo Lineares
Os motores apresentados at o momento so mquinas rotativas. Eles so projetados
de tal forma que seus rotores giram tanto no sentido horrio quanto no anti-horrio,
relativamente ao estator.
No entanto, existem motores projetados para realizarem movimentos lineares. Eles
so chamados motores lineares. Existem vrios tipos de motores lineares, porm sero
apresentados aqui apenas os de passo.
Motores de passo podem ser classificados como de relutncia varivel ou de m
permanente. As figuras a seguir mostram as estruturas de ambos.
FIGURA 1.7 - Motor Linear de Relutncia Varivel
10
FIGURA 1.8 - Motor Linear de m Permanente
11
2. Modelagem Matemtica do Motor Sncrono de Relutncia Varivel
O equacionamento matemtico do motor sncrono de relutncia varivel realizado
neste captulo com o intuito de conhecer os parmetros que afetam o conjugado
eletromagntico desenvolvido pela mquina.
2.1 Equacionamento das Indutncias
As equaes que descrevem o comportamento dinmico da mquina em estudo
podem ser construdas como funes das indutncias prprias e mtuas dos enrolamentos
existentes. No modelo aqui proposto o estator composto por um enrolamento trifsico
simtrico e o rotor por uma pea de material ferromagntico bipolar representada por eixos
de referncia, de forma que os campos magnticos so determinados em relao a estes
eixos. O eixo direto definido como o eixo coincidente com o eixo de menor relutncia. E
o eixo em quadratura definido formando 90 com o eixo direto.
2.1.1 Indutncias Prprias da Armadura
A indutncia prpria de cada fase do estator tem um valor positivo, porm com uma
variao do segundo harmnico, devido a variao da geometria do entre-ferro entre os
eixos direto e em quadratura ( MATSUI
[ ] 8
). A partir da figura 2.1 ilustra-se o que foi
afirmado.
Tomando-se o fluxo como a equao 2.1, a corrente na fase a produz um fluxo
magntico no entre-ferro que pode ser decomposto nos eixos direto e em quadratura.
= P.N.i ( 2.1 )
d d a a
P N i = cos ( 2.2 )
q q a a
P N i sin = ( 2.3 )
12
onde P significa permencia, e N e i representam o nmero de espiras e corrente
de fase, respectivamente. O ndice a corresponde a grandezas e caractersticas da fase a
do motor, enquanto os ndices d e q so relativos aos eixos direto e em quadratura,
respectivamente.
FIGURA 2.1 - Eixos d-q
Tomando-se o fluxo magntico na fase a em funo de suas componentes nos eixos
d e q tem-se
aa d q d q
sin
'
cos cos( ) cos = + + = 90
0
( 2.4 )
aa a a d q
N i P P sin
'
( cos ) = +
2 2
( 2.5 )
considerando que,
cos
cos
2
2 1
2
=
+
( 2.6 )
sin
2 2
1 = cos ( 2.7 )
tem-se,
13
aa a a
d q d q
N i
P P P P
'
cos =
+
+
|
\
|
2 2
2 . ( 2.8 )
A indutncia da fase a :
l
N
i
aa
a aa
a
=
( 2.9 )
l L L
aa a a
= +
0
2 cos ( 2.10 )
onde,
L
L L
a
m x mn
0
2
=
+
( 2.11 )
L
L L
a
m x mn
=
2
( 2.12 )
Por analogia, a indutncia das fases b e c so respectivamente :
l L L
bb a a
= + +
0
0
2 120 cos( ) ( 2.13 )
l L L
cc a a
= +
0
0
2 120 cos( ) ( 2.14 )
2.1.2 Indutncias Mtuas da Armadura
Procedendo-se de forma anloga ao desenvolvimento realizado na seo 2.1.1
mostra-se tambm que a mtua-indutncia entre duas fases do estator uma funo do
ngulo .
O fluxo produzido pela fase a e que enlaa a fase b dado por :
14
ab ba d q
= = + + cos( ) cos( ( )) 120 120 90
0 0 0
( 2.15 )
ba a a d q
N i P Psin sin = + ( cos cos( ) ( )) 120 120
0 0
( 2.16 )
ba a a
d q d q
N i
P P P P
=
+
+
|
\
|
4 2
2 120
0
cos( ) ( 2.17 )
A indutncia mtua entre as fases a e b :
M M
N
i
ab ba
a ba
a
= =
( 2.18 )
M M M M
ba ab ab ab
= = +
0
0
2 120
'
cos( ) ( 2.19 )
onde,
M
L L L
ba
a m x mn
0
0
2 4
= =
+
( 2.20 )
M L
L L
ba a
m x mn '
= =
2
( 2.21 )
Se considerarmos a disperso magntica, tem-se :
M
L
ba
a
0
0
2
=
'
( 2.22 )
15
Analogamente, as indutncias mtuas entre as fases b e c e entre a e c so,
respectivamente:
M M M M
bc cb ab ab
= = +
0
2
'
cos ( 2.23 )
M M M M
ac ca ab ab
= = + +
0
0
2 120
'
cos( ) ( 2.24 )
2.2 A Expresso Genrica do Conjugado
O desenvolvimento da expresso genrica do conjugado realizado aqui a partir da
representao da equao da malha formada por uma fonte de tenso e uma das fases do
motor.
Desenvolvendo-se a derivada do fluxo magntico em funo do tempo, tem-se
v Ri L
i
t
i
L
t
= + +
( 2.25 )
e, multiplicando-se ambos os lados da equao 2.25 pela corrente de fase, tem-se a
expresso da potncia eltrica solicitada fonte.
p vi Ri Li
i
t
i
L
t
= = + +
2 2
( 2.26 )
O primeiro termo do lado direito da expresso 2.26 representa a potncia dissipada
na resistncia de fase. O desenvolvimento da expresso da energia magntica em funo do
tempo dado por 2.27.
16
t
i L i
L
t
iL
i
t
1
2
1
2
2 2
|
\
|
= + ( 2.27 )
iL
i
t t
i L i
L
t
=
|
\
1
2
1
2
2 2
( 2.28 )
Substituindo-se o segundo termo da expresso 2.26 pela expresso 2.28, tem-se
p Ri i
L
t t
i L = + +
|
\
|
2 2 2
1
2
1
2
( 2.29 )
onde o segundo termo da expresso 2.29 representa a potncia mecnica desenvolvida pela
mquina.
P i
L
t
m
=
1
2
2
( 2.30 )
Aplicando-se as expresses 2.10, 2.13 e 2.14 em 2.30 obtm-se a expresso da
potncia mecnica numa mquina trifsica.
( ) ( ) ( )+ + + + + =
0
0
2
0
2
120 2 cos
2
1
2 cos
2
1
a a b a a a
L L i L L i Pm
( ) ( )
0
0
2
120 2 cos
2
1
+ +
a a c
L L i ( 2.31 )
( ) ( ) [ ]
0 2 0 2 2
120 2 120 2 2 + + + = sen i sen i sen i L Pm
c b a a
( 2.32 )
A expresso do conjugado mecnico num motor sncrono de relutncia varivel
trifsico dada por 2.33.
17
( ) ( ) ( )
0 2 0 2 2
120 2 120 2 2 + + + = sen i sen i sen i L C
c b a a M
( 2.33 )
2.3 - A Dinmica da Mquina
Considerando a utilizao de um conversor do tipo fonte de corrente acionando um
motor de relutncia varivel a vazio no modo de excitao de fase simples, ou seja, apenas
uma bobina acionada por vez, a equao dinmica do movimento da mquina dada a
seguir
( )
( ) ( ) ) (t C t K t B
dt
t d
J
m i
= + +
( 2.34 )
onde J o momento de inrcia do motor, B o coeficiente de atrito viscoso K a constante
elstica de toro, ) (t C
m
o conjugado desenvolvido pelo motor, ( ) t a velocidade
angular instantnea e ( ) t a posio angular instantnea.
A equao do conjugado desenvolvido pelo motor com p salincias rotricas e dada
por
) (
2
1
) (
2
p sen pLI t C
m
= . ( 2.35 )
importante notar que para 0 = o conjugado desenvolvido nulo, e para pequenos
deslocamentos deste ponto de equilbrio o conjugado positivo se 0 < e negativo se
0 > . Considerando agora o ngulo
d
como referncia, temos
)) ( (
2
1
) (
2
d m
p sen pLI t C = , ( 2.36 )
e ento, a equao 2.34, agora em funo da posio angular ( ) t e desprezando a toro
do eixo ( K = 0 ), passa a ser dada por
))) ( ) ( ( (
) ( ) (
2
2
t t p sen C
dt
t d
B
dt
t d
J
d mx
= + . ( 2.37 )
18
Considerando pequenos deslocamentos angulares ( ( ) ( ) t t
i d
) a equao 2.37
pode ser simplificada para
))) ( ) ( ( (
) ( ) (
2
2
t t p C
dt
t d
B
dt
t d
J
d mx
= + . ( 2.38 )
) ( ) (
) ( ) (
2
2
t p C t p C
dt
t d
B
dt
t d
J
d mx mx
= + + . ( 2.39 )
Aplicando a transformada de Laplace,
( ) ( ) ( ) [ ] ) ( ) ( 0
) (
0 ) (
0
2
s p C s p C s s B
dt
t d
s s s J
d mx mx
= + +
(
=
, ( 2.40 )
e considerando as seguintes condies iniciais, 0 ) ( = dt t d e ( )
i
= 0 , temos
( )
i d mx mx
B Js s p C s p C Bs Js ) ( ) ( ) (
2
+ + = + + . ( 2.41 )
A funo de transferncia que relaciona a posio do rotor ) (s em funo de uma
posio desejada ) (s
d
a partir de uma posio inicial
i
dada por
i
mx
d
mx
mx
p C Bs Js
B Js
s
p C Bs Js
pC
s
+ +
+
+
+ +
=
2 2
) (
) ( ) ( ( 2.41 )
i
mx
d
mx
mx
p C Bs Js
B Js
s
J
p C
s
J
B
s
J pC
s
+ +
+
+
+ +
=
2
2
) (
) ( ) ( ( 2.42 )
19
3. Caractersticas de Especificao do Motor Sncrono de Relutncia Varivel
Os parmetros usados para especificao de um motor sncrono de relutncia
varivel so estudados aqui. Os dois primeiros ( sees 3.1 e 3.2 ) se enquadram nas
caractersticas estticas enquanto os demais ( 3.3 e 3.4 ) so conhecidos como de
caracterstica dinmica, pois referem-se a condies de partida ou de regime do motor.
3.1 Caracterstica Conjugado Versus Posio
Excitando uma fase do motor de relutncia varivel haver uma tendncia de
alinhamento dos plos excitados do estator com plos do rotor. Caso no haja conjugado
externo aplicado ao eixo do motor haver o perfeito alinhamento dos plos. Por outro lado,
ao aplicar-se algum conjugado externo percebe-se que haver um deslocamento da
posio de alinhamento. A relao entre e o conjugado esttico aplicado no eixo dada
pelo grfico da figura 3.1. Observando o grfico percebe-se que em
m
encontra-se o
mximo conjugado aplicvel ao eixo sem causar movimento contnuo ao motor para outra
posio de alinhamento. Este conjugado chamado conjugado de manuteno (KENJO
[ ] 7
).
A relao entre e o conjugado esttico aplicado no eixo, sendo mantida constante a
corrente de fase, aproximadamente senoidal.
FIGURA 3.1 - Caracterstica conjugado esttico versus posio.
20
3.2 Caracterstica Conjugado Versus Corrente
O conjugado de manuteno de um motor sncrono de relutncia varivel cresce
com a corrente de excitao, e essa relao pode ser vista na figura 3.2 ( KENJO
[ ] 7
). Para
efeito de comparao, a figura 3.2 tambm mostra a caracterstica conjugado versus
corrente de um motor de passo hbrido, o qual apresenta m permanente. Ambos os
motores so tetrafsicos e tm um ngulo de passo de 1.8.
FIGURA 3.2 - Caracterstica conjugado versus corrente (a) para motor de
relutncia varivel e (b) para motor hbrido.
3.3 Caracterstica de Partida
A caracterstica de partida refere-se a faixa de conjugado de carga na qual o motor
pode partir e parar sem perda de passo em vrias frequncias de um trem de pulsos.
importante salientar que as especificaes do circuito de acionamento, o mtodo de
mensurao, o tipo de acoplamento e a inrcia da carga so relevantes no levantamento
dessa caracterstica ( KENJO
[ ] 7
).
Tanto a caracterstica de partida quanto a de conjugado/velocidade ( seo 3.4 )
sofrem influncia do circuito de acionamento no que se refere ao valor mdio de corrente
imposto, bem como a forma da onda de corrente, visto que o conjugado instantneo
proporcional ao quadrado da corrente instantnea .
21
Acoplamentos diretos transmitem carga a pulsao de conjugado, caracterstico do
motor sncrono de relutncia varivel. Outros acoplamentos introduzem constantes de
tempo mecnicas tais que fazem com que o conjugado aplicado carga seja praticamente
proporcional ao valor mdio do conjugado desenvolvido pelo motor. As situaes acima
citadas so extremas, mas possibilitam a compreenso da influncia do tipo de acoplamento
sobre as caractersticas de conjugado da mquina.
FIGURA 3.3 - Caracterstica conjugado versus velocidade.
A inrcia do conjunto motor-carga influencia a constante de tempo mecnica,
determinando, dessa forma, a sensibilidade do sistema s variaes instantneas de
conjugado produzidos pelo motor.
3.4 Caracterstica Conjugado Versus Velocidade
A utilizao de um motor de relutncia varivel em acionamentos de cargas
mecnicas nos obriga a conhecer quanto de conjugado o motor pode produzir em operaes
de acelerao, desacelerao ou de velocidade constante. Estas informaes so obtidas em
forma de grfico, e o que se chama caracterstica conjugado / velocidade, o qual mostra o
mximo valor de conjugado que pode ser desenvolvido pelo motor em cada velocidade de
operao. Se o conjugado de carga exceder a caracterstica conjugado mximo / velocidade,
o motor perde o sincronismo com a alimentao do estator e pra.
Uma caracterstica conjugado mximo versus velocidade mostrada na figura 3.4, a
qual pode ser dividida em trs regies bsicas. Em baixas velocidades cada fase permanece
22
energizada tempo suficiente para que se possa desprezar os tempos de subida e de
decaimento da corrente na fase. A corrente se mantm durante muito tempo no seu valor de
estado permanente, produzindo dessa forma conjugado alto. Em altas
FIGURA 3.4 - Caracterstica conjugado versus velocidade com instabilidades.
velocidades, os tempos de subida e de decaimento da corrente no chaveamento de cada fase
se tornam significativos diante do tempo de conduo total da fase e h uma reduo no
conjugado produzido pelo motor.
A figura 3.4 mostra que a caracterstica conjugado mximo versus velocidade
apresenta ressonncia e instabilidades em certas velocidades, as quais podem ser
classificadas em ressonncia de baixa frequncia, instabilidade de faixa mdia e oscilao
de faixa alta. Alm disso, o motor pode no conseguir partir normalmente com determinado
conjugado de carga em certas frequncias de passo ( KENJO
[ ] 7
).
A ressonncia de baixa frequncia ocorre com maior intensidade a medida que a
frequncia de operao se aproxima da frequncia natural da mquina, a qual ocorre em
torno de 100 Hz. Tambm ocorrem ressonncias em sub-harmnicos da frequncia natural.
Em muitas situaes prticas, os efeitos da ressonncia de baixa frequncia podem ser
contornados se o motor partir e for levado subitamente a uma frequncia de operao
acima da frequncia natural ( KENJO
[ ] 7
).
A operao da mquina numa faixa de frequncia entre 500 e 1500 Hz apresenta
comportamento instvel, mas de natureza diferente da ressonncia de baixa frequncia. A
chamada instabilidade da faixa mdia est associada a instabilidades no prprio motor, ao
tipo de conversor utilizado ou ao modo de excitao. A mquina pode operar em condies
23
estveis durante muitos segundos ou at alguns minutos quando subitamente a instabilidade
ocorre ( KENJO
[ ] 7
).
Se o motor acelerado com sucesso e consegue atravessar a regio de instabilidade
de faixa mdia ele poder sofrer outro fenmeno de instabilidade se o mesmo atingir a faixa
de frequncia compreendida entre 2500 e 4000 Hz, o qual conhecido como oscilao de
faixa alta. No se tem muito conhecimento sobre as causas deste comportamento
( KENJO
[ ] 7
).
3.5 Ressonncia e Instabilidades
O estudo de ressonncia e instabilidades apresentado nesta seo, visto que a
compreenso dos mesmos importante na implementao de acionamentos com motores
sncronos de relutncia varivel.
Energizando-se uma fase de um motor de relutncia varivel em baixa velocidade, o
rotor tende a buscar uma posio de equilbrio como um sistema de segunda ordem. A
figura 3.5 mostra uma resposta tpica.
FIGURA 3.5 - Oscilao de posicionamento.
24
Considerando-se apenas o primeiro termo do lado direito da equao 2.42 e que
s s
d d
= ) ( , temos
|
\
|
+ +
=
J
p C
s
J
B
s s
J p C
s
mx
mx
d
2
) ( . ( 3.2 )
Com o auxlio de uma tabela de transformadas de Laplace percebe-se a semelhana entre
|
\
|
+ +
J
p C
s
J
B
s s
J p C
mx
mx
2
e
( )
2 2
2
2
n n
n
s s s
+ +
.
Assim, se
J
pC
n
max
= e
max
1
2 JpC
B
= ,
A transformada inversa de Laplace de 3.2 dada por
( )
|
|
\
|
+
t sen e K t
n
t
n
2
2
1
1
1
1 ) ( ( 3.3 )
onde
d
K = e
|
|
\
|
=
2
1
arctg .
A equao que relaciona a posio angular do rotor de um motor de relutncia
varivel acionado no modo de excitao do tipo simples fase em funo do tempo dada
por
( )
|
|
|
|
|
\
|
(
(
+
|
|
\
|
t
J
B
J
p C
sen e
p JC
B
t
mx
t
J
B
mx
d i
2
2
2
2
4
4
1
1
1 ( 3.4 )
25
|
|
\
|
= 1
4
2
max
B
JpC
arctg
Da expresso acima conclui-se que :
Elevaes no coeficiente de amortecimento reduzem a freqncia e a durao das
oscilaes, porm aumentam o tempo de subida ( tempo necessrio para atingir a
posio desejada pela primeira vez ), alm de baixar o rendimento da operao;
Elevaes na corrente reduzem o tempo de subida, porm aumentam a amplitude e a
frequncia da oscilao;
Cargas diferentes produzem comportamentos oscilatrios diferentes, em amplitudes
e frequncias.
A figura 3.6 mostra o comportamento do posicionamento de um motor de relutncia
varivel para duas frequncias de chaveamento das fases. A curva representada em linha
cheia indica um comportamento a uma frequncia menor que a frequncia natural da
mquina, no havendo perda de passo. J a linha tracejada mostra a operao em frequncia
prxima da frequncia natural, em torno de 100 Hz, e se observa a elevao da amplitude
das oscilaes a cada passo at que ocorre a perda de sincronismo ( ACARNLEY
[ ] 5
).
Alm da ressonncia mecnica mencionada acima, o motor de relutncia varivel
ainda pode apresentar comportamento instvel numa faixa de frequncia de chaveamento
que vai de 500 a 1500 Hz. Esse tipo de oscilao conhecida como ressonncia de mdia
frequncia ou instabilidade de mdia frequncia, e devido a instabilidades no motor, no
acionamento ou no acoplamento ( KENJO
[ ] 7
).
26
_ _ _ frequncia natural
____ 0,6 x frequncia natural
FIGURA 3.6 - Perda de sincronismo.
3.6 Efeito da Saturao Magntica
A eficincia dos motores sncronos de relutncia varivel na converso de energia
eltrica em trabalho dependente do nvel de saturao magntica ao qual o motor
submetido. O estudo sobre os efeitos da saturao magntica realizado nesta seo.
27
FIGURA 3.7 - Perfil da indutncia de fase.
As indutncias das fases no motor de relutncia varivel apresentam o perfil
mostrado na figura 3.7, o qual ser demonstrado oportunamente. Na posio em que os
dentes do rotor esto perfeitamente alinhados com os do estator, bem como nas suas
imediaes, a indutncia da fase mxima, pois a relutncia do circuito mnima. J na
posio de mximo desalinhamento e imediaes, a indutncia mnima. Entre estes dois
patamares existem regies, por um lado, de crescimento linear da indutncia e, por outro
lado, de decrescimento linear da indutncia ( BUJA & VALLA
[ ] 13
).
A forma mais efetiva de produo de conjugado no motor de relutncia varivel
com a energizao das fases apenas nas regies de crescimento das suas indutncias.
Objetivando observar o efeito da saturao magntica no balano energtico do
processo de produo de trabalho da mquina, realizada a seguir uma anlise matemtica
e grfica.
A equao da malha formada por uma fonte de tenso e uma das fases do motor
dada pela expresso 3.5.
V r i
t
= + .
( 3.5 )
28
Considerando desprezvel a queda de tenso na resistncia de fase, para efeito de
simplificao, a expresso reduz-se a
V
t
=
( 3.6 )
onde
= L i . ( 3.7 )
A expresso da potncia eltrica solicitada pela fase pode ser dada por
P V i i
t
i L
i
t
i
L
t
ele
= = = +
|
\
|
. .
( 3.8 )
Considerando que a fase est inicialmente na posio de perfeito desalinhamento e que a
mesma ser mantida nesta posio para uma evoluo de corrente de zero a i
0
, tem-se que o
termo i L t zero. Um pressuposto dessa afirmao que o nvel de corrente
envolvido na operao baixo o suficiente para manter a relao linear entre fluxo e
corrente. Outro aspecto importante que a elevao da corrente deve ser feita lentamente
para que se possa desprezar as perdas devido as correntes de Foucalt. Tem-se,
da expresso 3.9, que a energia fornecida pela fonte armazenada no circuito magntico,
a qual dada pela rea do tringulo de vrtices O, A e
0
. Agora,
FIGURA 3.8 - Energia convertida em trabalho mecnico na regio linear
da curva de magnetizao.
29
objetivando reduzir oscilao no movimento, permite-se o deslocamento lento do rotor at
a posio de perfeito alinhamento com o estator e tem-se que a energia armazenada no
campo dada pela rea do tringulo de vrtices O, B e
1.
W P t Li i Li i W
ele ele campo
=
=
= = = . .
1
2
1
2
2
( 3.9 )
O acrscimo de energia armazenada no campo apenas metade do incremento de
energia eltrica (
0
AB
1
) solicitada pelo sistema, a qual dada por (
1
-
2
).i . Da
pode-se concluir que a rea hachuriada
( ) W i i i
campo
= =
1
2
1
2
1
2
1 0 1 2
. . ( 3.10 )
corresponde ao trabalho mecnico desenvolvido no deslocamento da posio de
desalinhamento para a posio de alinhamento. Deduz-se que a operao da mquina na
regio linear no permite converso de energia eltrica em trabalho numa taxa superior a
50%.
FIGURA 3.9 - Energia convertida em trabalho mecnico considerando
a saturao magntica.
30
Operando a mquina a nveis de corrente tais que o ncleo magntico opere na
regio de saturao pode-se obter taxas superiores a 50% e consequentemente, maior
eficincia na converso de energia, como pode ser visto na figura 3.9.
Os motores sncronos de relutncia varivel convertem melhor energia eltrica em
trabalho quando operam na regio de saturao do ncleo magntico. A utilizao de um
circuito de acionamento adequado pode recuperar para a fonte a energia armazenada no
campo magntico a menos das perdas ocorridas no circuito de acionamento ( MILLER
[ ] 3
).
31
4. Operao do Motor de Relutncia Varivel
4.1 Modos de Excitao
Motores de relutncia varivel que possuem circuitos de chaveamento
independentes para cada fase podem, simultaneamente, ter quaisquer fases excitadas.
Convencionalmente, para o motor trifsico, os modos de excitao so: excitao de fase
simples ( A, B, C, ... ), excitao de meio passo ( A, AB, B, BC, C, CA, ... ) ou excitao
em dupla fase ( AB, BC, CA, ... ). O primeiro e o terceiro modos citados produzem rotao
com passo completo enquanto o segundo reduz o passo metade do passo pleno.
Acionamentos com excitao de fase simples produzem rotao com o sucessivo
alinhamento de dentes do rotor com os plos das fases excitadas sequencialmente (figura
4.1). J na excitao de dupla fase, apesar de haver o passo completo, no h o alinhamento
das estruturas rotrica e estatrica (figura 4.2). O modo de excitao com meio passo
combina as aes dos dois acima citados, como pode ser visto na figura 4.3.
Operao no Modo de Simples Fase
FIGURA 4.1 - Ilustrao da operao do motor com o modo de excitao de fase
simples.
32
Operao no Modo de Fase Dupla
FIGURA 4.2 - Ilustrao da operao do motor com o modo de excitao de dupla fase.
Operao no Modo de Meio Passo
FIGURA 4.3 - Ilustrao da operao do motor com o modo de excitao de meio passo.
33
O modo de excitao de dupla fase apresenta-se menos oscilante que a excitao de
fase simples. Isso se d porque as duas fases alimentadas simultaneamente, desde que o
conversor permita, formam uma malha onde as oscilaes mecnicas do rotor produzem
oscilaes de corrente nas fases. Estas correntes geram conjugados que atuam em oposio
s oscilaes mecnicas. Dessa forma a energia cintica associada oscilao mecnica
convertida em dissipao trmica nos enrolamentos das fases em questo e no conversor
( KENJO
[ ] 7
), conforme ilustrado na figura 4.4.
FIGURA 4.4 - Efeito da oscilao mecnica sobre o circuito de comando das fases.
ACARNLEY & HUGHES
[ ] 11
, ao analisarem graficamente a caracterstica
conjugado esttico versus posio do rotor, deduzem o conjugado em baixa velocidade do
motor sncrono de relutncia varivel do tipo conjunto magntico mltiplo. Considerando a
34
caracterstica conjugado/posio idealmente senoidal, os modos de fase simples e dupla
fase produzem conjugados iguais, enquanto a excitao com meio-passo capaz de
aumentar a produo de conjugado em torno de 15%. Considerando que nos trs modos a
corrente em cada fase a mesma, a potncia solicitada pelo motor e, consequentemente, as
perdas hmicas so maiores no modo de dupla fase e menores em fase simples. O modo de
fase simples o mais vantajoso em relao a eficincia, pois pode produzir 86% do maior
conjugado (modo meio-passo) enquanto solicita apenas 67% da potncia solicitada pelo
modo meio-passo. Porm, apresenta um menor conjugado por unidade de volume.
O clculo do conjugado em altas velocidades apresenta-se com maior dificuldade de
execuo, pois a fora eletromotriz resultante da variao da indutncia com a posio
torna-se significativa, produzindo deformao da forma de onda de corrente da fase. Porm,
com a utilizao de um eficiente mtodo numrico possvel realiz-lo
( ACARNLEY & HUGHES
[ ] 12
). ACARNLEY & HUGHES
[ ] 11
computaram potncia
mecnica de sada, perdas no cobre do motor, perdas no conversor e eficincia de um
sistema composto por um motor sncrono de relutncia varivel do tipo conjunto magntico
mltiplo associado, em cada fase, a um conversor de supresso passiva como o da figura
19. As perdas devido a histerese e correntes de Foulcaut no foram includas nesta anlise.
Como resultado, foram obtidas curvas de conjugado, potncia, perdas e eficincia, versus
velocidade, como mostrado nas figuras 4.5, 4.6 e 4.7. Pode-se concluir o seguinte :
O conjugado no modo meio-passo maior que o conjugado produzido pelos outros
dois modos em toda a faixa de velocidade analisada, sendo mantidas iguais as
correntes de fase nos trs modos;
As perdas no bobinamento so proporcionais ao tempo de durao da excitao das
fases e, com o aumento da velocidade essas perdas diminuem, pois o tempo de
subida da corrente na fase torna-se significativo, produzindo reduo dos nveis de
corrente atingidas;
A eficincia do motor na converso de potncia maior quando operado no modo
de excitao de fase simples.
35
FIGURA 4.5 - Conjugado, potncia de sada, perdas e eficincia no motor
para modo de excitao de fase simples.
FIGURA 4.6- Conjugado, potncia de sada, perdas e eficincia no motor
para modo de excitao de meio passo.
FIGURA 4.7 - Conjugado, potncia de sada, perdas e eficincia no motor
para modo de excitao de dupla fase.
36
O modo de excitao de fase simples apresenta-se mais vantajoso do que os outros
dois modos. Apesar de apresentar menor conjugado por unidade de volume do que o modo
de meio-passo, o modo de excitao no qual a converso de potncia mais eficiente.
Esta uma caracterstica atrativa, principalmente, para acionamentos em sistemas onde a
autonomia da fonte de energia um fator importante.
4.2 Fontes Alimentadoras para Motores de Relutncia Varivel
Motores de relutncia varivel podem ser alimentados por fontes de corrente ou de
tenso. Com fontes de corrente, um gerador de corrente com amplitude ajustvel aplica
pulsos de corrente nas fases em posies especficas do rotor. A comutao de corrente
entre fases realizada pelo conversor de potncia.
Utilizando-se fonte de tenso, um gerador de tenso de amplitude constante
aplicada fase com polaridade positiva ou negativa. A aplicao de tenso de polaridade
positiva na fase produz um crescimento de corrente, enquanto tenso de polaridade
contrria, por tempo determinado, produz um rpido decaimento da corrente. O
recortamento da tenso do gerador pode produzir a aplicao de tenses mdias menores
que o valor nominal da fonte, objetivando o controle da corrente da fase.
Uma discusso sobre os dois tipos de fontes ser realizada tomando como base o
pressuposto de que a tenso na fase do motor, quando da aplicao de uma fonte de
corrente, no deve ultrapassar a tenso nominal da mquina, e que a corrente na fase do
motor seja limitada ao valor nomimal quando se utiliza uma fonte de tenso ( BUJA &
VALLA
[ ] 13
).
4.2.1 Fonte de Corrente
Utilizando uma fonte de corrente, um conversor chaveia uma fonte de corrente de
uma fase para outra. Considerando que o bobinamento do motor uma carga indutiva, a
transio de corrente de uma fase para outra no se d instantaneamente. Enquanto a
corrente da fase que est sendo desligada decai, a corrente na fase que est sendo ligada se
37
eleva, de forma tal que, em todo instante, a soma dessas duas correntes deve ser igual ao
valor ajustado na fonte de corrente. O processo de comutao impe sobretenses nas
chaves de potncia, evidenciando o compromisso entre transies rpidas e sobretenses
nas chaves. A utilizao de circuitos especiais podem reduzir essas sobretenses.
FIGURA 4.8 - Corrente de fase em motores de relutncia varivel
alimentados com fonte de corrente.
Desprezando-se a queda de tenso na resistncia de fase e negligenciando-se o
efeito da comutao, primeiro e segundo termos da expresso 4.1, a forma de onda da
corrente a de um pulso retangular como na figura 4.8. Pela expresso 4.2 tem-se que
para velocidades
( )
( )
V R i L
i
t
L
i = + + .
.
.
( 4.1 )
N
N
N
V
K I
=
.
( 4.2 )
maiores que a velocidade nominal, respeitando os limites de tenso e corrente da fase, a
corrente necessariamente ter que ser reduzida, com consequente reduo do conjugado.
Aplicando-se o limite de corrente nominal no levantamento da caracterstica conjugado-
velocidade obtm-se a figura 4.9 ( BUJA & VALLA
[ ] 13
).
38
FIGURA 4.9 - Caracterstica conjugado versus velocidade com
alimentao por fonte de corrente.
4.2.2 Fonte de Tenso
Motores de relutncia varivel alimentados por fontes de tenso podem apresentar
formas de onda de corrente e tenso diversas. A seguir podem ser vistos dois exemplos
tpicos.
( a ) ( b )
FIGURA 4.10 - Diagrama tpico de tenso e corrente de fase em motores
de relutncia varivel alimentados com fonte de tenso.
39
Objetivando produzir um posicionamento do eixo do motor, energiza-se uma das
fases com a tenso plena da fonte, o que eleva o valor da corrente a In ( figuras 4.10.a e
4.10.b ). Aps essa primeira etapa existem duas opes de energizao. Uma delas o
recortamento de tenso ou modo de controle de corrente, o qual usado quando a fora-
contra-eletromotriz pequena relativamente a tenso da fonte, permitindo a aplicao de
tenses mdias na carga ( Vc ) variveis atravs do recorte de tenso da fonte sobre a fase,
com consequente controle de corrente ( figura 4.10.a ). A outra opo o modo de controle
de ngulo, utilizado quando a fora-contra-eletromotriz maior que a tenso da fonte
( figura 4.10.b ). Nesse modo a tenso da fonte mantida plena e a corrente decresce
tendendo ao valor dado na equao 4.2.
O processo de desenergizao da fase inicia-se normalmente no final da regio de
crescimento da indutncia ( decrescimento da relutncia ) com aplicao de uma tenso de
polaridade reversa inicial ou com algum outro mtodo de decaimento rpido da corrente
de fase. Algumas vezes a corrente de decaimento pode perdurar at a regio de
decrescimento da curva de indutncia, o que poder acarretar na produo de uma
componente de conjugado negativo. Esse conjugado negativo no prejudica a operao do
motor desde que se garanta que a corrente da fase se extinguir antes da reaplicao de
tenso de polaridade positiva em uma das fases.
A operao do motor de relutncia varivel com fonte de tenso no modo de
controle de corrente se assemelha bastante operao com fonte de corrente. Porm, na
operao com modo de controle de ngulo, a fonte de tenso apresenta maior capacidade
de produo de conjugado que a fonte de corrente, pois a corrente permanece acima do
valor dado pela expresso 4.2, o qual o mximo desenvolvido por fontes de corrente.
Considerando que o conjugado desenvolvido pela mquina proporcional ao quadrado da
corrente, a utilizao de fonte de tenso mais vantajosa quando se deseja operar um
motor de relutncia varivel em uma larga faixa de velocidade ( BUJA & VALLA
[ ] 13
).
Em seguida, so apresentadas algumas estruturas de fontes de tenso.
40
4.2.3 Estruturas de Fontes de Tenso
As fontes de tenso descritas na seo 4.2.2 podem ser implementadas com
diferentes topologias de conversores de potncia. Cada uma dessas topologias tem
caractersticas peculiares, no sendo possvel estabelecer um conversor ideal para todas as
aplicaes. Aspectos como custo, volume, flexibilidade de controle, capacidade de
conjugado, perdas e eficincia so bastante relevantes.
4.2.3.1 Conversor de Supresso Passiva
Circuitos providos de supresso passiva de energia, tm a energia armazenada no
campo magntico de cada fase do motor dissipada em um resistor ou um diodo zener. Em
cada fase, a fonte de tenso conectada atravs de uma chave esttica, tendo um resistor
limitador de corrente ligado em srie, e um diodo com um resistor dissipador em srie
conectado em antiparalelo com a fase. Quando a chave em srie ligada, a tenso da fonte
ligada ao conjunto fase + resistor limitador e a corrente cresce. Caso o motor se
mantenha estacionrio o resistor limitador mantm a corrente na fase no valor nominal da
mesma.
Rf Rf Rf
Vn
FIGURA 4.11 - Conversor de supresso passiva.
A configurao citada pode ser implementada com fontes de tenso acima do valor
nominal de fase, desde que, a medida que a tenso seja maior , a resistncia limitadora
tambm o seja , objetivando limitar a corrente no valor nominal. importante salientar
41
que quanto maiores forem os resistores limitadores, tanto menores sero as constantes de
tempo do circuito, e consequentemente, chaveamentos de corrente podem ocorrer
satisfatoriamente em velocidades cada vez maiores. Dessa forma, a elevao da tenso de
alimentao aumenta a faixa de operao da mquina na curva conjugado-velocidade,
porm a custas da elevao das perdas hmicas e reduo da eficincia. Este problema
pode ser contornado pelo conversor tipo recortador de tenso, o qual dispensa o uso de
resistncia limitadora, mantendo a capacidade de desenvolvimento de conjugado.
Quando a chave esttica desligada a corrente da fase segue atravs de um diodo e
um resistor de supresso de energia ou um diodo zener. A inteno aqui proporcionar um
rpido decaimento da corrente de fase. A desvantagem que a chave ser submetida a uma
maior sobretenso. Para um resistor de supresso de energia de valor zero a mxima tenso
coletor-emissor no transistor ser igual a tenso da fonte. Mas com a resistncia de
supresso de energia ser V[1 + Rf / R], e com o diodo zener ser V + Vz.
Essa configurao, com suas variantes, apresenta uma independncia entre fases e
apenas uma chave por fase. Porm, apresenta as desvantagens da ausncia de recuperao
de energia e da fadiga da chave devido a sobretenses, pois quanto mais curto for o tempo
de desligamento, tanto maior ser a sobretenso, sendo necessria a utilizao de circuitos
auxiliares comutao na chave.
4.2.3.2 Conversor C - Dump
O conversor C - Dump apresenta uma chave por fase, um capacitor de
armazenamento e um circuito de recortamento para retornar a energia armazenada no
campo magntico de volta para a fonte ( BUJA & VALLA
[ ] 13
). Quando a chave conectada
em srie com a fase desligada, a corrente da bobina segue para o capacitor, elevando sua
tenso a nveis superiores a da fonte. Ento, o circuito recortador de tenso se encarrega de
devolver a carga do capacitor para a fonte.
42
L
C
Vn
FIGURA 4.12 - Conversor C-Dump .
Essa configurao apresenta a vantagem de manter a independncia entre fases e
utilizar poucas chaves. Porm, se a chave do recortador de tenso se mantiver fechada por
alguma falha, a tenso do capacitor cresce sem limite causando a destruio do conversor e
do motor. Dessa forma, cuidados especiais devem ser tomados no projeto do circuito de
proteo.
4.2.3.3 Conversor em Ponte
O conversor em ponte utiliza duas chaves de potncia por fase, com dois diodos
para retornar a energia armazenada no campo magntico das bobinas para a fonte. No
comeo do perodo de energizao da fase, ambas as chaves so levadas conduo,
aplicando a tenso plena da fonte no bobinamento e produzindo elevao de corrente.
Quando a corrente atinge o valor desejado, a chave superior da ponte desligada e a
operao de circulao de corrente estabelecida entre bobina, chave inferior da ponte e
seu respectivo diodo. A tenso atravs da chave quase zero e a corrente decai lentamente.
E assim, a manuteno da corrente da fase em torno do valor desejado implementada
com a entrada em conduo da chave superior. No final do perodo de energizao, as duas
chaves so levadas ao corte simultaneamente e a corrente segue para fonte atravs dos dois
diodos.
43
Vn
FIGURA 4.13 - Conversor em ponte.
As principais vantagens do conversor em ponte so: completa independncia entre
fases, devoluo de energia do circuito magntico para a fonte e mnimo stress em cada
chave semicondutora.
As desvantagens so o uso de duas chaves por fase com os respectivos circuitos de
comando, e a necessidade de circuitos de comando com referncia flutuante para as chaves
superiores.
4.2.3.4 Conversor em Ponte com Chave Comum
O conversor em ponte com chave comum uma modificao do conversor em
ponte, no qual houve a substituio das chaves superiores das fases por apenas uma,
comum a todas as fases. O modo de recortamento de tenso implementado pelo
transistor comum, enquanto as chaves das fases comutam esse modo de operao na
sequncia imposta a partir das informaes provenientes de um sensor de posio de eixo.
O controle de corrente pode ser implementado com sensores de corrente nas fases,
individualmente ou por um sensor comum no barramento ( BUJA & VALLA
[ ] 13
).
44
Vn
FIGURA 4.14 - Conversor em ponte com chave comum.
O resultado da reduo do nmero de componentes no conversor em ponte com
chave comum o aumento do tempo de comutao das fases relativo ao conversor
discutido na seo 4.2.3.3, tendo em vista que no final do perodo de energizao de uma
fase a chave comum mantida aberta, impossibilitando a energizao da fase seguinte.
Dessa forma, deve haver um retardo no comando de energizao das fases. Ento conclui-
se que essa estrutura impe um limite de operao a uma velocidade inferior propiciada
por um conversor em ponte. Alm disso, a estrutura menos robusta do ponto de vista de
confiabilidade, pois toda operao do conversor dependente de apenas uma chave.
O conversor em ponte rene caractersticas favorveis a sua aplicao no prottipo
do tracionamento de um rob mvel utilizando o motor sncrono de relutncia varivel. A
completa independncia entre fases do conjunto motor-conversor favorece utilizao de
mtodos no convencionais de deteco de posio do eixo do motor a partir da
monitorao da forma de onda de corrente de fase. Outra caracterstica a possibilidade de
devoluo de energia armazenada no circuito magntico do motor para a fonte. Esta
devoluo realizada com mais segurana do que com o conversor C - dump e
contribui com a elevao da autonomia de sistemas alimentados por baterias.
45
A seguir, so estudadas as caractersticas de operao de motores sncronos de
relutncia varivel em malha aberta e malha fechada.
4.3 Operao em Malha Aberta
O motor de relutncia varivel opera sincronamente frequncia de
sequenciamento das fases. A operao em malha aberta utiliza essa propriedade para
implementar o comando de velocidade e posio economicamente vantajoso, mas que
apresenta algumas limitaes. Apesar da simplicidade e baixo custo inerentes a essa forma
de operao, caractersticas favorveis aplicao desse mtodo, o conjunto motor-carga
pode no atingir a velocidade imposta pelo comando devido a existncia de faixas de
velocidade na caracterstica conjugado versus velocidade nas quais ocorrem
comportamentos oscilatrios e instveis, tornando-se uma desvantagem.
O processo pelo qual o motor atinge as especificaes de velocidade e nmero de
passos deve respeitar a caracterstica conjugado versus velocidade. Dependendo do nmero
de passos a executar e do conjugado de carga, o motor deve partir na regio de partida-
parada e ser acelerado at atingir a regio de alta velocidade. Nesta regio deve ser
realizado o maior nmero de passos possvel at que se aproxime da posio especificada,
quando o motor deve ser reconduzido regio de partida-parada e posteriormente parado.
Quando se deseja atingir uma determinada posio num determinado intervalo de
tempo, torna-se imprescindvel conhecer a capacidade de acelerao e desacelerao do
motor. So dois os perfis mais comuns de velocidade em funo do tempo utilizados no
comando em malha aberta: perfil linear e perfil parablico ( GAVA
[ ] 14
).
O motor dever desenvolver um conjugado superior ao conjugado de carga para
que haja um processo de acelerao. Isto representado pela expresso matemtica 4.3
( ) ( ) T T J
t
L
= +
|
\
|
2
2
.
( 4.3 )
46
onde T() e TL() so respectivamente conjugado desenvolvido pelo motor e conjugado
de carga em funo da velocidade. Como
2 2
.t representa a acelerao da mquina,
pode ser observado que geralmente se consegue aceleraes maiores na regio de partida-
parada, onde o conjugado da mquina maior, e que na regio de alta velocidade o motor
deve ser acelerado de forma moderada.
( ) ( )
a
T T
J
L
=
( 4.4 )
O perfil de velocidade parablico permite maior acelerao mdia que o perfil
linear. Considerando que no perfil linear a acelerao mantida constante at atingir a
regio de alta velocidade, a mesma ser limitada no seu valor no pior caso, o qual ocorre
na regio de alta velocidade.
passos / s
posio
FIGURA 4.15 - Perfil linear de velocidade em malha aberta.
J no perfil parablico o motor pode partir em baixas velocidades, onde a
acelerao pode ser a maior possvel, e gradualmente, a medida que o motor se aproxima
da velocidade desejada, a acelerao reduzida at atingir zero.
Pode ser observado na figura 4.16 que o tempo de desacelerao pode ser
significantemente menor que o tempo de acelerao, isso devido a tendncia do conjugado
de carga de retardar o sistema motor-carga.
47
passos / s
posio
FIGURA 4.16 - Perfil parablico de velocidade em malha aberta.
4.4 Operao em Malha Fechada
Os sistemas tradicionais de comando de motores de passo utilizam malha aberta.
Esse tipo de operao apresenta o inconveniente do risco da perda de passo com a variao
da carga. Como no h o monitoramento da posio do eixo, o sistema incapaz de
detectar e corrigir perdas de passo.
Uma prtica adotada para aumentar a confiabilidade na execuo dos passos a
aplicao de um nvel de corrente tal que garanta uma grande margem de segurana na
produo de conjugado para aplicaes com carga varivel. As caractersticas de
conjugado de carga devem ser restringidas para prevenir solicitaes em excesso, a
velocidade mxima deve ser limitada e as taxas de acelerao e desacelerao devem ser
restringidas a valores que no ultrapassem o conjugado mximo. Isto significa
subutilizao do acionamento e utilizao de motores maiores em conjugado e potncia do
que necessrio se for utilizada operao em malha fechada.
O desempenho do sistema pode melhorar significantemente com a monitorao da
posio e/ou velocidade do eixo e realimentao para um controlador, o qual emite sinais
de controle para corrigir perdas de passo e/ou velocidade. Com isso possvel controlar
conjugado, expandir a faixa de velocidade de operao, aumentar as taxas de acelerao e
desacelerao, suprimir os efeitos das oscilaes de baixa frequncia e instabilidades,
permitir a adaptao a possveis variaes de carga e conferir confiabilidade no
posicionamento.
48
4.5 Minimizao da Pulsao de Conjugado
O motor de relutncia varivel apresenta grande pulsao de conjugado.
Objetivando a reduo dessa pulsao que vrios mtodos de controle de conjugado tm
sido estudados e apresentados na literatura. O mtodo mais popular tem sido o de
armazenar a caracterstica conjugado-ngulo-corrente numa tabela, de tal forma que seja
aplicada fase um valor adequado de corrente numa determinada posio do eixo para
atender uma especificao de conjugado ( KAVANAGH et al
[ ] 18
). Outro mtodo
baseado na estimao do conjugado instantneo a partir da curva caracterstica fluxo
magntico acoplado versus corrente e posio do eixo ( MOREIRA
[ ] 19
). Essas curvas so
obtidas pela medio da tenso e corrente em diferentes posies do rotor e, ento,
aplicado o mtodo de interpolao spline cbicas. A estimativa do conjugado instantneo
obtida em tempo real a partir da avaliao de um polinmio de terceira ordem cujos
coeficientes foram pr-computados e armazenados na memria de um sistema
microprocessado usado para implementar o controle. A estimativa comparada com uma
referncia e o resultado aplicado a um regulador de corrente para regular a corrente de
fase.
Os mtodos convencionais de minimizao da pulsao do conjugado mantm a
corrente de fase num determinado nvel pelo controle por histerese ou PWM para produzir
conjugado constante. Contudo, o perfil da corrente no processo de comutao entre fases,
onde a pulsao maior , no tem recebido a devida ateno.
49
Conjugado
Graus Eltricos
Figura 4.17 - Simulao de conjugados para motor de relutncia 8/6 de 1hp.
HUSAIN & EHSANI
[ ] 20
apresentam uma estratgia de controle de conjugado em
baixas velocidades na qual a corrente de cada fase obedece a um perfil pr-
determinado, tal que a soma dos conjugados produzidos por cada fase seja constante e
igual ao valor desejado. O mtodo capaz de levar em considerao os efeitos da
saturao. Os resultados da simulao em um perodo eltrico para produo de conjugado
constante de 0.025 Nm numa velocidade de 500 rpm so mostrados na figura 5.26, onde
podem ser vistos os conjugados produzidos por cada fase, individualmente, e o conjugado
total da mquina.
A minimizao da pulsao de conjugado no poder ser implementada neste
projeto, visto que o mtodo de deteco da posio do eixo empregado possibilita a
indicao de apenas uma posio por passo do motor. Isto incompatvel com as tcnicas
de minimizao da pulsao do conjugado estudadas nesta seo.
50
Apndice A Anlise Grfica do Conjugado Desenvolvido em MRV com 4 Salincias
Rotricas
51
52
53
Apndice B Resultados de Ensaios de Posicionamento de Motor de
Relutncia Varivel
A seguir so apresentados resultados de ensaios com um motor de relutncia
varivel do tipo three-stack acionado por conversor em ponte (regenerativo) sob
condies de carga, nveis de corrente de referncia e velocidades diferentes.
As trs condies de carga so: operao a vazio; operao de iamento de uma
massa de 1kg presa ao eixo do motor atravs de um fio metlico (carga 1); e acionamento
de uma carga atravs do atrito no contato entre o eixo do motor e um aro emborrachado
preso ao eixo da carga (carga 2).
OBSERVAES:
Considerando o comportamento do motor no posicionamento a vazio, com
velocidade de 8pps e nveis de corrente de 1.5 A e 4.5 A (figuras B.1 e B.7)
percebe-se que quanto maior o nvel de corrente aplicado fase, mantendo-se
constantes os outros parmetros que possam afetar a forma de posicionamento do
motor, maior o sobressinal apresentado. Percebe-se tambm que a elevao do
nvel de corrente eleva a frequncia de oscilao (figuras B.1 e B.7).
Admitindo-se que a aplicao de uma carga em iamento pode ser considerada, para
efeito de anlise, como uma elevao da inrcia do conjunto motor-carga, observa-
se pela comparao entre as figuras B.1 e B.2 ou B.7 e B.8 que quanto maior a
inrcia, menor a frequncia da oscilao.
O comportamento do motor no posicionamento a uma velocidade de 122pps
apresenta-se significantemente menos oscilatrio que a uma velocidade de 8pps nas
trs condies de carga e dois nveis de corrente analisados (figuras B.4, B.5, B.6,
B.10, B.11 e B.12).
O comportamento do motor no posicionamento com a carga 2, a uma velocidade de
122pps, sugere uma adaptao melhor do conjunto motor-carga ao nvel de corrente
de 1.5 A do que ao de 4.5 A (figuras B.6 e B.12,).
54
FIGURA B.1 - Posicionamento sem carga, corrente de referncia 1.5A e
velocidade 8pps.
FIGURA B.2 - Posicionamento com carga 1, corrente de referncia 1.5A e
velocidade 8pps.
55
FIGURA B.3 - Posicionamento com carga 2, corrente de referncia 1.5A e
velocidade 8pps.
FIGURA B.4 - Posicionamento sem carga, corrente de referncia 1.5A e
velocidade 122pps.
56
FIGURA B.5 - Posicionamento com carga 1, corrente de referncia 1.5A e
velocidade 122pps.
FIGURA B.6 - Posicionamento com carga 2, corrente de referncia 1.5A e
velocidade 122pps.
57
FIGURA B.7 - Posicionamento sem carga, corrente de referncia 4.5A e
velocidade 8pps.
FIGURA B.8 - Posicionamento com carga 1, corrente de referncia 4.5A e
velocidade 8pps.
58
FIGURA B.9 - Posicionamento com carga 2, corrente de referncia 4.5 e
velocidade 8pps.
FIGURA B.10 - Posicionamento sem carga, corrente de referncia 4.5A e
velocidade 122pps.
59
FIGURA B.11 - Posicionamento com carga 1, corrente de referncia 4.5A e
velocidade 122pps.
FIGURA B.12 - Posicionamento com carga 2, corrente de referncia 4.5A e
velocidade. 122pps.
60
REFERNCIAS BIBLIOGRFICAS
[1] OLIVEIRA Jr., Nery de. Acionamento de Avano para Mquinas-ferramenta e
Robs. Comparaes Entre as Tcnicas CA/CC. Separata da Revista Siemens, setembro
1988, Reimp. 1990.
[2] FITZGERALD, A. E., KINGSLEY Jr, Charles e KUSKO, Alexander. Mquinas
Eltricas. McGraw-Hill.
[3] MILLER, T. J. E. Brushless Permanent-Magnet and Reluctance Motor Drives. New
York, Oxford University Press, 1989.
[4] MURPHY, J. M. D. e TURNBULL, F. G.. Power Quality/ASD, outubro. 1990.
[5] ACARNLEY, P. P.. Stepping Motors : a guide to modern theory and pratice. 2. ed.,
Londres, Peter Peregrinus LTD, 1984.
[6] GAYAKWAD, Ramakant e SOKOLOFF, Leonard. Analog and Digital Control
System. Englewood Cliffs-New Jersey, Prentice Hall, 1988.
[7] KENJO, Takashi. Stepping Motors - ( Monographs in Electrical and Electronic
Engineering ). New York, Oxford University Press, 1986.
[8] MATSUI, Nobuyuki, AKAO, Norihiko e WAKINO, Tomoo. High-Precision Torque
Control of Reluctance Motors. IEEE Transactions on Industry Applications, VOL.. 27, NO.
5 : 902-907, setembro/outubro. 1991.
[9] UEZATO, Katsumi, SENJYU, Tomonobu e TOMORI, Yoshikatsu. Modeling and
Vector Control of Synchronous Reluctance Motors Including Stator Iron. IEEE
Transactions on Industry Applications, VOL. 30, NO. 4 : 971- 976, julho/agosto. 1994.
[10] SUDHOFF, S. D. e KRAUSE, P. C.. Analysis of Steady-State Operation of a
Multistack Variable-Reluctance Stepper Motor Using dq0 Variables. IEEE Transactions on
Energy Conversion, VOL. 6, NO. 4 : 693-698, dezembro. 1991.
[11] ACARNLEY, Paul P. e HUGHES, Austin. Machine / Drive Circuit Interactions in
Small Variable Reluctance Stepping and Brushless DC Motor System. IEEE Transactions
on Industrial Eletronics, VOL. 35, NO. 1 : 67 - 74 , fevereiro. 1988.
[12] ACARNLEY, Paul P. e HUGHES, Austin. Predicting the Pull-out Torque/speed
Curve of Variable-Reluctance Stepping Motors. IEE Proc. B. Elect. Power Applications,
VOL. 128, NO. 2 : 109 - 113, 1981.
61
[13] BUJA, G. S. e VALLA, M. I.. Power Converters in Switched Reluctance Motor
Drives. Brazilian Power Eletronics Conference, SOBRAEP/UFSC, 142 -147, dezembro.
1991.
[14] GAVA, Vagner Luiz.. Comando de Motor de Passo Hbrido em Malha Fechada
Atravs da Tcnica de ngulos de Avano. So Paulo, 1993. 126p. [Dissertao -
Mestrado Escola Politcnica da Universidade de So Paulo].
[15] HARRIS, Walter D. e LANG, Jeffrey H.. A Simple Motion Estimator for Variable
Reluctance Motors. IEEE Transactions on Industry Applications, VOL.. 26, NO. 2 : 237-
243, maro/abril. 1990.
[16] EHSANI, Mehrdad, HUSAIN, Iqbal e KULKARNI, Ashok B.. Elimination of
Discrete Position Sensor and Current Sensor in Switched Reluctance Motor Drives. IEEE
Transactions on Industry Applications, VOL. 28, NO. 1:128 -135, janeiro/fevereiro. 1992.
[17] ACARNLEY, Paul P., HILL, Roland J. e HOOPER, Clive W.. Detection of Rotor
Position in Stepping and Switched Motors by Monitoring of Current Waveforms. IEEE
Transactions on Industrial Eletronics, VOL. IE-32, NO. 3: 215-222, agosto. 1985.
[18] KAVANAGH, R. C., MURPHY, J. M. D. e EGAN, M. G.. Torque Ripple
Minimization in Switched Reluctance Drives Using Self-learning Techniques. IEEE -
IECON Conf. Rec. , 289-294. 1991.
[19] MOREIRA, J. C.. Torque Ripple Minimization in Switched Reluctance Motors Via
Bi-cubic Spline Interpolation. IEEE - PESC Conf. Rec., 851- 856. 1992.
[20] HUSAIN, Iqbal e EHSANI, Mehrdad. Torque Minimization in Switched Reluctance
Motor Drives by PWM Current Control. IEEE. 1994.
OBRAS CONSULTADAS
MEDEIROS, Cludio Marques de S. Comando de Motor de Relutncia Varivel sem
Sensor no Eixo para Rob Mvel. Fortaleza, 1996. 147p. [Dissertao - Mestrado
Universidade Federal do Cear].
Vous aimerez peut-être aussi
- Concurso CEITECDocument22 pagesConcurso CEITECdanitranoster8512Pas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Pe 19 2015 ImpugnacaoDocument41 pagesPe 19 2015 Impugnacaodanitranoster8512Pas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Manual KodakDocument106 pagesManual KodakSilva DjalmaPas encore d'évaluation
- Aquasnap30RH ManualDocument36 pagesAquasnap30RH ManualNeilor PaivaPas encore d'évaluation
- Edital 78 2020 Selecao CLI 2021 1Document20 pagesEdital 78 2020 Selecao CLI 2021 1danitranoster8512Pas encore d'évaluation
- Nova Lei de Licitacoes e Contratos AdministrativosDocument148 pagesNova Lei de Licitacoes e Contratos AdministrativosÁlvaro Jr.50% (2)
- Meu RedentorDocument1 pageMeu Redentordanitranoster8512Pas encore d'évaluation
- Coro Kids AvivaDocument4 pagesCoro Kids Avivadanitranoster8512Pas encore d'évaluation
- IHMOP-RASAR035 Rev02 Nov2013 - InverterDocument44 pagesIHMOP-RASAR035 Rev02 Nov2013 - InverterFelipe RodrigoPas encore d'évaluation
- Sistema Agua GeladaDocument22 pagesSistema Agua GeladaElias Barros de FigueiredoPas encore d'évaluation
- 2 Avaliação Curso GabineteDocument5 pages2 Avaliação Curso Gabinetedanitranoster8512Pas encore d'évaluation
- Mãe MãeDocument1 pageMãe Mãedanitranoster8512Pas encore d'évaluation
- Notas de Aula 2016Document103 pagesNotas de Aula 2016danitranoster8512Pas encore d'évaluation
- DicaDocument50 pagesDicaVinicius UcelliPas encore d'évaluation
- Aula Santa Ceia DepinDocument2 pagesAula Santa Ceia Depindanitranoster8512100% (1)
- 3 Avaliação Curso GabineteDocument1 page3 Avaliação Curso Gabinetedanitranoster8512Pas encore d'évaluation
- Curso ILB Poder Legislativo MunicipalDocument8 pagesCurso ILB Poder Legislativo Municipaldanitranoster8512Pas encore d'évaluation
- Condicionador de Ar Central. Self Contained - Bax - BWXDocument20 pagesCondicionador de Ar Central. Self Contained - Bax - BWXaks74100% (1)
- Lei Organica Maracanau 2016Document89 pagesLei Organica Maracanau 2016danitranoster8512Pas encore d'évaluation
- Apostila Completa Organização de Gabinete ParlamentarDocument118 pagesApostila Completa Organização de Gabinete Parlamentardanitranoster8512Pas encore d'évaluation
- Aula 10 Pid Via Lugar Das RaizesDocument41 pagesAula 10 Pid Via Lugar Das Raizesdanitranoster8512Pas encore d'évaluation
- Tutorial LogixProDocument21 pagesTutorial LogixProantonsuwantoPas encore d'évaluation
- Curso ILB Poder Legislativo MunicipalDocument8 pagesCurso ILB Poder Legislativo Municipaldanitranoster8512Pas encore d'évaluation
- Exp3 Acionamentos IDocument56 pagesExp3 Acionamentos Idanitranoster8512Pas encore d'évaluation
- PPA Municipal 12 PassosDocument24 pagesPPA Municipal 12 Passosdanitranoster8512Pas encore d'évaluation
- Original DECLARAÇÃO Informal de AluguelDocument2 pagesOriginal DECLARAÇÃO Informal de Aluguelwildemann100% (3)
- PCC Eng Mecatrônica-Gestão e Controle Da Qualidade-CEME.159Document2 pagesPCC Eng Mecatrônica-Gestão e Controle Da Qualidade-CEME.159danitranoster8512Pas encore d'évaluation
- Modelo Projeto Pivict 2012-2013Document12 pagesModelo Projeto Pivict 2012-2013ilkesamarPas encore d'évaluation
- Manual de Instalacoes 2012 PDFDocument87 pagesManual de Instalacoes 2012 PDFccprado1100% (1)
- SVS - Motor Elétrico de PassoDocument11 pagesSVS - Motor Elétrico de PassoROGERIO MANOEL DA SILVAPas encore d'évaluation
- Evolucao Da Mecanizacao AgricolaDocument10 pagesEvolucao Da Mecanizacao AgricolaBruno Queiroz100% (3)
- Equipamento SannyDocument336 pagesEquipamento SannyMarcus VeniciusPas encore d'évaluation
- Check List - AirlessDocument38 pagesCheck List - AirlessJair Ferreira FirmoPas encore d'évaluation
- Procedimento de Medição de Fuamaça Preta.Document23 pagesProcedimento de Medição de Fuamaça Preta.marcosouteiro26100% (1)
- Manual XTZ PDFDocument172 pagesManual XTZ PDFBruno CesarPas encore d'évaluation
- Peças Alternativas Midnight StarDocument6 pagesPeças Alternativas Midnight StarCentro Musical Lauro BaungardtPas encore d'évaluation
- Apresentação Master ISB - ISL CM2150 SN Intro - TRADUZIDODocument265 pagesApresentação Master ISB - ISL CM2150 SN Intro - TRADUZIDORR DIESEL100% (1)
- Tudo Sobre Alfa Romeo 156, Opinião de Quem Tem UmaDocument2 pagesTudo Sobre Alfa Romeo 156, Opinião de Quem Tem UmaCavallerorsPas encore d'évaluation
- PXJ 14 PDFDocument62 pagesPXJ 14 PDFFernanda SchlickmannPas encore d'évaluation
- Apresentação AssistDocument25 pagesApresentação AssistEnio FranciscoPas encore d'évaluation
- Eficiência Energética em Um Sistema de Ar ComprimidoDocument34 pagesEficiência Energética em Um Sistema de Ar ComprimidoPedro HassanPas encore d'évaluation
- d74d7 Antunes, P. D. R. Veicculos Eletricos Funcionamento e Seus Beneficios. TCC, 2018.Document73 pagesd74d7 Antunes, P. D. R. Veicculos Eletricos Funcionamento e Seus Beneficios. TCC, 2018.alfreliaPas encore d'évaluation
- Energia e EquidadeDocument3 pagesEnergia e EquidadeGean CarlosPas encore d'évaluation
- Intervalos de Manutenção John DeereDocument3 pagesIntervalos de Manutenção John DeereBruno Lacerda Junior100% (3)
- Circuito Que Detecta o Fluxo de Corrente - Detecta Situação de Excesso de CorrenteDocument15 pagesCircuito Que Detecta o Fluxo de Corrente - Detecta Situação de Excesso de CorrenteUm Mundo alem do obvioPas encore d'évaluation
- Resumo Proconve e PromotDocument12 pagesResumo Proconve e PromotJanderson Honorio Mazzine AfonsoPas encore d'évaluation
- Apostila Sobre Inversores - Colégio PolitecDocument15 pagesApostila Sobre Inversores - Colégio PolitecbrulimoliPas encore d'évaluation
- Manual Gerador GM3500Document12 pagesManual Gerador GM3500Aline AndradePas encore d'évaluation
- Manual MSV 20max-250Document44 pagesManual MSV 20max-250#dancosta67% (9)
- Manual KOMATSU PC80MR-3Document302 pagesManual KOMATSU PC80MR-3André LinharesPas encore d'évaluation
- BMW N20 Engine Traduzido PT BRDocument134 pagesBMW N20 Engine Traduzido PT BRhallam100% (5)
- Lista LadderDocument3 pagesLista LadderPablo SampaioPas encore d'évaluation
- Área Industrial - 18.05.2017 - Tarde - 2. SISTEMA DE COMBATE A INCÊNDIO EM TANQUES DE COMBUSTÍVEL - Andre AmaralDocument39 pagesÁrea Industrial - 18.05.2017 - Tarde - 2. SISTEMA DE COMBATE A INCÊNDIO EM TANQUES DE COMBUSTÍVEL - Andre AmaralGustavo AmaralPas encore d'évaluation
- Oficina - D6123Document1 451 pagesOficina - D6123Ricardo100% (2)
- Gerador-HFW-60 T6B-SPDocument12 pagesGerador-HFW-60 T6B-SPAilton GuimarãesPas encore d'évaluation
- Electrolux LF75Document14 pagesElectrolux LF75pilotodc10100% (2)
- Manual de Injecao Fiat IAW49FBDocument69 pagesManual de Injecao Fiat IAW49FBCarlos Peroni Jr.100% (1)
- Plano de Fogo e Desmonte A Ceu AbertoDocument52 pagesPlano de Fogo e Desmonte A Ceu AbertoNiquice Mazive100% (3)