Vous aimerez peut-être aussi
- Solicitaciones y TensionesDocument1 pageSolicitaciones y TensionesjimenezlucasPas encore d'évaluation
- Numeros ComplejosDocument4 pagesNumeros ComplejosjimenezlucasPas encore d'évaluation
- Solicitaciones y TensionesDocument1 pageSolicitaciones y TensionesjimenezlucasPas encore d'évaluation
- Mapa PymesDocument3 pagesMapa PymesjimenezlucasPas encore d'évaluation
- Concentracion de TensionesDocument3 pagesConcentracion de TensionesjimenezlucasPas encore d'évaluation
- Numeros ComplejosDocument22 pagesNumeros Complejosmherold2Pas encore d'évaluation
- LocalDocument19 pagesLocaljimenezlucasPas encore d'évaluation
- 2 - Resúmen de Test de HipótesisDocument2 pages2 - Resúmen de Test de HipótesisjimenezlucasPas encore d'évaluation
- Resumen CostoDocument2 pagesResumen CostojimenezlucasPas encore d'évaluation
- Apps World North America 2015 San FranciscoDocument1 pageApps World North America 2015 San FranciscojimenezlucasPas encore d'évaluation
- Poli MerosDocument15 pagesPoli MerosjimenezlucasPas encore d'évaluation
- Saint SeiyaDocument1 pageSaint SeiyajimenezlucasPas encore d'évaluation
- Unidad III Teoria Del ValorDocument36 pagesUnidad III Teoria Del ValorjimenezlucasPas encore d'évaluation
- SQLDocument3 pagesSQLjimenezlucasPas encore d'évaluation
- Ciencias Naturales PDFDocument20 pagesCiencias Naturales PDFMario SimonovichPas encore d'évaluation
- Tratamiento de Desechos LíquidosDocument25 pagesTratamiento de Desechos LíquidosjimenezlucasPas encore d'évaluation
- PatchDocument49 pagesPatchragiwePas encore d'évaluation
- Presentacion Mar Del PlataDocument39 pagesPresentacion Mar Del PlatajimenezlucasPas encore d'évaluation
- Sin TiDocument2 pagesSin TijimenezlucasPas encore d'évaluation
- Luxometro (Final)Document75 pagesLuxometro (Final)Giovanni Villavicencio Lujano100% (1)
- Realizacion y Gestion de La Iluminacion Aula EspecializadaDocument6 pagesRealizacion y Gestion de La Iluminacion Aula EspecializadajimenezlucasPas encore d'évaluation
- Act Simulacion LenguaDocument20 pagesAct Simulacion Lenguaprofedani710% (1)
- Narut Sadness and SorrowDocument1 pageNarut Sadness and SorrowjimenezlucasPas encore d'évaluation
- Ciencias Naturales PDFDocument20 pagesCiencias Naturales PDFMario SimonovichPas encore d'évaluation
- Act Simulacion LenguaDocument20 pagesAct Simulacion Lenguaprofedani710% (1)
- Decision of Destiny (Arpa de Abel)Document1 pageDecision of Destiny (Arpa de Abel)jimenezlucasPas encore d'évaluation
- AutotransformadorDocument6 pagesAutotransformadoranon_285629455Pas encore d'évaluation
- AutotransformadorDocument6 pagesAutotransformadoranon_285629455Pas encore d'évaluation
- Integracion MultipleDocument70 pagesIntegracion MultipleErick GiioPas encore d'évaluation
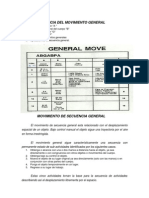
- Apuntes MOST para Estudiantes 1Document19 pagesApuntes MOST para Estudiantes 1Alondra Jatzeni Dìaz MadridPas encore d'évaluation
- Fibras Manufacturadas Cortadas. Métodos de Ensayo - NTC959Document14 pagesFibras Manufacturadas Cortadas. Métodos de Ensayo - NTC959Lily Marcela PalaciosPas encore d'évaluation
- SegmentaciónDocument4 pagesSegmentaciónLuis Alberto Isaias Cerda CifuentesPas encore d'évaluation
- Sesión 1 - Cinemática de Una Partícula - Movimiento RectilíneoDocument10 pagesSesión 1 - Cinemática de Una Partícula - Movimiento RectilíneoOrlandoPas encore d'évaluation
- Tarea 2 Distribucion de FrecuenciasDocument8 pagesTarea 2 Distribucion de FrecuenciasLeidy CumbalPas encore d'évaluation
- Flujo EléctricoDocument4 pagesFlujo EléctricoJuan Jesus Navarro Salas100% (1)
- Relacion 25 Preguntas Fisica I (Und 2)Document6 pagesRelacion 25 Preguntas Fisica I (Und 2)juliosietePas encore d'évaluation
- P3 G Cinetica FenolftaleinaDocument7 pagesP3 G Cinetica FenolftaleinagissellemaileenPas encore d'évaluation
- Cartaboneo y MedicionDocument32 pagesCartaboneo y MedicionSamuel VillarrealPas encore d'évaluation
- Pruebas Fisicas 2022Document11 pagesPruebas Fisicas 2022Sofy ManciniPas encore d'évaluation
- Procedimiento Verificacion de PH MetroDocument5 pagesProcedimiento Verificacion de PH MetrojballinasPas encore d'évaluation
- 0601 AlveoConsisto User ESDocument122 pages0601 AlveoConsisto User ESSamuel Su100% (1)
- APUNTES DE ESCUELA DEL PATRON DE YATE - SeguridadDocument12 pagesAPUNTES DE ESCUELA DEL PATRON DE YATE - SeguridadMiguel Sanch100% (1)
- Certificación Entrenamiento Funcional Metodos de Entrenamiento 1 (Circ, Emom, Fortime)Document28 pagesCertificación Entrenamiento Funcional Metodos de Entrenamiento 1 (Circ, Emom, Fortime)rq100% (1)
- COLREG - Anexos.Document11 pagesCOLREG - Anexos.IGNACIO GALIANOPas encore d'évaluation
- Es Pages Brochures Technical Download Fms200904 Calculo de La Banda Transportadora 304 SPDocument16 pagesEs Pages Brochures Technical Download Fms200904 Calculo de La Banda Transportadora 304 SPsil_muahdibPas encore d'évaluation
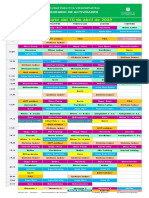
- Horarios Actividades Abono Deporte Valdelasfuentes Desde El 10 de AbrilDocument1 pageHorarios Actividades Abono Deporte Valdelasfuentes Desde El 10 de AbrilJose RiveraPas encore d'évaluation
- TamizDocument3 pagesTamizLaura RöJasPas encore d'évaluation
- Practica Cinematica 2 DimDocument3 pagesPractica Cinematica 2 DimRaul Arispe Veizaga100% (1)
- Dieta FlexibleDocument8 pagesDieta FlexibleBig BicepsPas encore d'évaluation
- 6 Posturas de Preparación para La Asana Del LotoDocument8 pages6 Posturas de Preparación para La Asana Del LotoAgustin DiazPas encore d'évaluation
- Rutina Mes 1 Definicion Mujeres en Casa Mas Cardio Ultima ActualizacionDocument21 pagesRutina Mes 1 Definicion Mujeres en Casa Mas Cardio Ultima ActualizacionEdwin TorresPas encore d'évaluation
- Brujula de Tangentes InformeDocument11 pagesBrujula de Tangentes InformeGustavo SalazarPas encore d'évaluation
- Analisis VectorialDocument24 pagesAnalisis VectorialEsteban Andrés Lazo ReyesPas encore d'évaluation
- Prueba Proctor Estandar o Aashto EstandarDocument5 pagesPrueba Proctor Estandar o Aashto EstandarDaan Abú SchumiPas encore d'évaluation
- S2 SoliDocument22 pagesS2 SoliJavierPas encore d'évaluation
- 600 EjerciciosDocument22 pages600 EjerciciosEnrique Cruz SánchezPas encore d'évaluation
- Horarios Clases Colectivas 2022 23Document1 pageHorarios Clases Colectivas 2022 23Sergio FranciscoPas encore d'évaluation
- Funciones VectorialesDocument7 pagesFunciones VectorialesJuan Camilo Bayuelo BehainePas encore d'évaluation