Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- An Improved Pipelined MSB-First Add-Compare Select Unit Structure For Viterbi DecodersDocument8 pagesAn Improved Pipelined MSB-First Add-Compare Select Unit Structure For Viterbi DecodersDarshan KumarPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Parallel Viterbi Algorithm Implementation Breaks ACS BottleneckDocument6 pagesParallel Viterbi Algorithm Implementation Breaks ACS BottleneckDarshan KumarPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 06994649Document8 pages06994649Darshan KumarPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- MemoryDocument3 pagesMemoryPrasad KumarPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- CordicDocument3 pagesCordicDarshan KumarPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Get DocumentDocument41 pagesGet DocumentDarshan KumarPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- CordicDocument3 pagesCordicDarshan KumarPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Review Article: CORDIC Architectures: A SurveyDocument20 pagesReview Article: CORDIC Architectures: A SurveyDarshan KumarPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Make FileDocument2 pagesMake FileDarshan KumarPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- SRAMDocument2 pagesSRAMDarshan KumarPas encore d'évaluation
- 61W 25772 0 HRDocument14 pages61W 25772 0 HRDarshan KumarPas encore d'évaluation
- Color Spaces and JPEGDocument24 pagesColor Spaces and JPEGDarshan KumarPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Architecture Support For Custom Instructions With Memory OperationsDocument4 pagesArchitecture Support For Custom Instructions With Memory OperationsDarshan KumarPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Statistical Static Timing Analysis Technology: (Manuscript Received April 19, 2007)Document8 pagesStatistical Static Timing Analysis Technology: (Manuscript Received April 19, 2007)Darshan KumarPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Enet Parser Spec PDFDocument7 pagesEnet Parser Spec PDFDarshan KumarPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- WWW TestbenchDocument3 pagesWWW TestbenchDarshan KumarPas encore d'évaluation
- DD VcredistMSI23DBDocument57 pagesDD VcredistMSI23DBDarshan KumarPas encore d'évaluation
- Arbiters: Design Ideas and Coding StylesDocument22 pagesArbiters: Design Ideas and Coding StylesVamsi Chakradhar100% (1)
- Ahb FeaturesDocument1 pageAhb FeaturesDarshan KumarPas encore d'évaluation
- Final IndexDocument58 pagesFinal IndexDarshan KumarPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- CummingsDVCon2011 UVM TerminationTechniquesDocument58 pagesCummingsDVCon2011 UVM TerminationTechniquesbap_001Pas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Anatomy Abdomen MCQs For DNBDocument62 pagesAnatomy Abdomen MCQs For DNBPG Aspirant100% (2)
- Conversion of Units of Temperature - Wikipedia, The Free Encyclopedia PDFDocument7 pagesConversion of Units of Temperature - Wikipedia, The Free Encyclopedia PDFrizal123Pas encore d'évaluation
- Keya PandeyDocument15 pagesKeya Pandeykeya pandeyPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- StandardsDocument3 pagesStandardshappystamps100% (1)
- John GokongweiDocument14 pagesJohn GokongweiBela CraigPas encore d'évaluation
- Part E EvaluationDocument9 pagesPart E EvaluationManny VasquezPas encore d'évaluation
- HI - 93703 Manual TurbidimetroDocument13 pagesHI - 93703 Manual Turbidimetrojesica31Pas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- ADSLADSLADSLDocument83 pagesADSLADSLADSLKrishnan Unni GPas encore d'évaluation
- Railway RRB Group D Book PDFDocument368 pagesRailway RRB Group D Book PDFAshish mishraPas encore d'évaluation
- Ieee Research Papers On Software Testing PDFDocument5 pagesIeee Research Papers On Software Testing PDFfvgjcq6a100% (1)
- Bob Duffy's 27 Years in Database Sector and Expertise in SQL Server, SSAS, and Data Platform ConsultingDocument26 pagesBob Duffy's 27 Years in Database Sector and Expertise in SQL Server, SSAS, and Data Platform ConsultingbrusselarPas encore d'évaluation
- Journal Publication FormatDocument37 pagesJournal Publication FormatAbreo Dan Vincent AlminePas encore d'évaluation
- Elaspeed Cold Shrink Splices 2010Document3 pagesElaspeed Cold Shrink Splices 2010moisesramosPas encore d'évaluation
- Continue: Adobe Project Voco DownloadDocument3 pagesContinue: Adobe Project Voco DownloadLazlo SecretPas encore d'évaluation
- Improvements To Increase The Efficiency of The Alphazero Algorithm: A Case Study in The Game 'Connect 4'Document9 pagesImprovements To Increase The Efficiency of The Alphazero Algorithm: A Case Study in The Game 'Connect 4'Lam Mai NgocPas encore d'évaluation
- I. ICT (Information & Communication Technology: LESSON 1: Introduction To ICTDocument2 pagesI. ICT (Information & Communication Technology: LESSON 1: Introduction To ICTEissa May VillanuevaPas encore d'évaluation
- Internship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Document59 pagesInternship Report Recruitment & Performance Appraisal of Rancon Motorbikes LTD, Suzuki Bangladesh BUS 400Mohammad Shafaet JamilPas encore d'évaluation
- Royalty-Free License AgreementDocument4 pagesRoyalty-Free License AgreementListia TriasPas encore d'évaluation
- Academy Broadcasting Services Managerial MapDocument1 pageAcademy Broadcasting Services Managerial MapAnthony WinklesonPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Bank Statement AnalysisDocument26 pagesBank Statement AnalysisAishwarya ManoharPas encore d'évaluation
- Diagnostic Information For Database Replay IssuesDocument10 pagesDiagnostic Information For Database Replay IssuesjjuniorlopesPas encore d'évaluation
- 2020-05-14 County Times NewspaperDocument32 pages2020-05-14 County Times NewspaperSouthern Maryland OnlinePas encore d'évaluation
- Arizona Supreme CT Order Dismisses Special ActionDocument3 pagesArizona Supreme CT Order Dismisses Special Actionpaul weichPas encore d'évaluation
- API MidtermDocument4 pagesAPI MidtermsimranPas encore d'évaluation
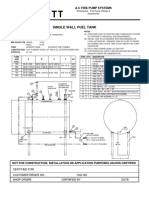
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocument1 pageSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoPas encore d'évaluation
- Beams On Elastic Foundations TheoryDocument15 pagesBeams On Elastic Foundations TheoryCharl de Reuck100% (1)
- How To Make Money in The Stock MarketDocument40 pagesHow To Make Money in The Stock Markettcb66050% (2)
- Proposal Semister ProjectDocument7 pagesProposal Semister ProjectMuket AgmasPas encore d'évaluation
- Supply Chain ManagementDocument30 pagesSupply Chain ManagementSanchit SinghalPas encore d'évaluation
- Chapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationDocument16 pagesChapter 6: Structured Query Language (SQL) : Customer Custid Custname OccupationSarmila MahendranPas encore d'évaluation
- BRD TemplateDocument4 pagesBRD TemplateTrang Nguyen0% (1)