Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Photovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeDocument2 pagesPhotovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeSteveAbonyiPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Waterpurifier: Mobile Drinking Water Treatment SystemDocument4 pagesWaterpurifier: Mobile Drinking Water Treatment SystemSteveAbonyiPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
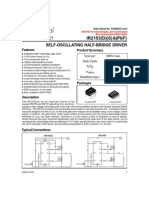
- Ir 2153Document9 pagesIr 2153SteveAbonyiPas encore d'évaluation
- Terrawatt LaserDocument69 pagesTerrawatt LaserSteveAbonyiPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Force On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)Document38 pagesForce On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)SteveAbonyiPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- NEC Projector Lt265 ManualDocument145 pagesNEC Projector Lt265 ManualSteveAbonyiPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Superstrings TheoryDocument31 pagesSuperstrings TheorySteveAbonyiPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Recent Advancements of RF Guns: Luigi Faillace Radiabeam Technologies, Santa Monica CaDocument43 pagesRecent Advancements of RF Guns: Luigi Faillace Radiabeam Technologies, Santa Monica CaSteveAbonyiPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- H.A.W.System Vehicle H.A.W.System Vehicle: Hydrogen CarDocument2 pagesH.A.W.System Vehicle H.A.W.System Vehicle: Hydrogen CarSteveAbonyiPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Antigravity MetodeDocument25 pagesAntigravity MetodeSteveAbonyiPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Upower Analog 2Q08 Calpoly SM FinalDocument36 pagesUpower Analog 2Q08 Calpoly SM FinalSteveAbonyiPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Tem 2Document3 pagesTem 2SteveAbonyiPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- 0029 CaseDocument4 pages0029 CaseSteveAbonyiPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- TmaDocument3 pagesTmaSteveAbonyiPas encore d'évaluation
- Brilliance iCT Technical BackgrounderDocument2 pagesBrilliance iCT Technical Backgroundermedgadget100% (4)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Advanced BusesDocument44 pagesAdvanced BusestkazutaPas encore d'évaluation
- Sage X3 - User Guide - A Quick Tour of F9 PDFDocument27 pagesSage X3 - User Guide - A Quick Tour of F9 PDFcaplusincPas encore d'évaluation
- Slice Based Testing DoubleDocument5 pagesSlice Based Testing DoubleusitggsipuPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- SreenuDocument2 pagesSreenuSubbareddy NvPas encore d'évaluation
- IHACRES 2.1 UserGuide SecondEditionDocument55 pagesIHACRES 2.1 UserGuide SecondEditionJunior BerrocalPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- 1.functional Specification PTP With EDIDocument36 pages1.functional Specification PTP With EDIAnil Kumar100% (4)
- Final Syllabus ICE 3rd Semester4,5,6,7,8Document106 pagesFinal Syllabus ICE 3rd Semester4,5,6,7,8Arup ChowdhuryPas encore d'évaluation
- Name: Aish Siddiqui Id: FA19-BEEE-0037 Lab: 09 Subject: MBS Task: 01 CodeDocument6 pagesName: Aish Siddiqui Id: FA19-BEEE-0037 Lab: 09 Subject: MBS Task: 01 CodeShyk ShakirPas encore d'évaluation
- Class IX Final TermDocument4 pagesClass IX Final TermSonam BaghaPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Oil711 Install GuideDocument56 pagesOil711 Install GuidesantukomPas encore d'évaluation
- Doxper Write-Up - HospitalsDocument5 pagesDoxper Write-Up - HospitalsSanjay BPas encore d'évaluation
- CodeCompass - An Open Software Comprehension Framework For Industrial UsageDocument9 pagesCodeCompass - An Open Software Comprehension Framework For Industrial UsageJexiaPas encore d'évaluation
- Comandos MikrotikDocument4 pagesComandos MikrotikDaniel ReynaPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Find Minimum of Unconstrained Multivariable Function Using Derivative-Free Method - MATLAB FminsearchDocument5 pagesFind Minimum of Unconstrained Multivariable Function Using Derivative-Free Method - MATLAB FminsearchCristian Giovanny Gomez OlartePas encore d'évaluation
- 3104 Manual PDFDocument442 pages3104 Manual PDFmariosergioslPas encore d'évaluation
- 254 Web Development Standards Draft v2.0Document44 pages254 Web Development Standards Draft v2.0WarBugPas encore d'évaluation
- Introduction To 8086 MicroprocessorDocument13 pagesIntroduction To 8086 MicroprocessorVijay Arunagiri APas encore d'évaluation
- Tutorial App Inventor - Bhs Ing - PDFDocument38 pagesTutorial App Inventor - Bhs Ing - PDFNik Yusanida Nik DaudPas encore d'évaluation
- ArtCAM Pro UserGuide FRADocument511 pagesArtCAM Pro UserGuide FRAMohammed Lamsalli80% (5)
- Despre RPADocument2 pagesDespre RPATudor Sorin AlexandruPas encore d'évaluation
- M. Asghar Bhatti-Fundamental Finite Element Analysis and Applications - With Mathematica and MATLAB Computations PDFDocument720 pagesM. Asghar Bhatti-Fundamental Finite Element Analysis and Applications - With Mathematica and MATLAB Computations PDFmanas batraPas encore d'évaluation
- Angular 7 GuideDocument11 pagesAngular 7 GuideMohamed NissanPas encore d'évaluation
- C Bodi 20Document41 pagesC Bodi 20Azfar RazaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Kumpulan Wang Simpanan PekerjaDocument17 pagesKumpulan Wang Simpanan Pekerjawnq5181Pas encore d'évaluation
- Cotton Reel Challenge Order Form: Thank You For Your SupportDocument1 pageCotton Reel Challenge Order Form: Thank You For Your SupportLucy EFPas encore d'évaluation
- Teddy Bear Pop Up Card - Tutorial - YouTubeDocument2 pagesTeddy Bear Pop Up Card - Tutorial - YouTubepdss3124Pas encore d'évaluation
- Kiran 2011Document2 pagesKiran 2011Venkata ReddyPas encore d'évaluation
- Akshaya PatraDocument5 pagesAkshaya PatraHarsh BansalPas encore d'évaluation
- Software Requirements SpecificationDocument2 pagesSoftware Requirements SpecificationYathestha Siddh100% (1)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldD'EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldÉvaluation : 3.5 sur 5 étoiles3.5/5 (64)