Vous aimerez peut-être aussi
- Papers - 2007-4 (Bus Arrival Time Prediction Using GPS Data)Document11 pagesPapers - 2007-4 (Bus Arrival Time Prediction Using GPS Data)Fabio LaynePas encore d'évaluation
- A33 User Manual Release 1.1Document574 pagesA33 User Manual Release 1.1El RuloPas encore d'évaluation
- The Smith-Waite Centennial TarotDocument52 pagesThe Smith-Waite Centennial TarotClassic Bobby80% (5)
- Booklets Rules HP78 BookletDocument44 pagesBooklets Rules HP78 BookletEl Rulo100% (1)
- A33 User Manual Release 1.1Document574 pagesA33 User Manual Release 1.1El RuloPas encore d'évaluation
- The Imaginary Number I Is RealDocument11 pagesThe Imaginary Number I Is RealHumberto GonzalezPas encore d'évaluation
- A33 User Manual Release 1.1Document574 pagesA33 User Manual Release 1.1El RuloPas encore d'évaluation
- KL 1 RussianCircularSlideRuleDocument2 pagesKL 1 RussianCircularSlideRuleEl RuloPas encore d'évaluation
- Computing Examples For The Curta Calculating MachineDocument55 pagesComputing Examples For The Curta Calculating MachineEl RuloPas encore d'évaluation
- Chariots of FireDocument161 pagesChariots of FireEl RuloPas encore d'évaluation
- Coe Non Award 2015 HandbookDocument52 pagesCoe Non Award 2015 HandbookEl RuloPas encore d'évaluation
- Efficient Estimation of Intraday Volatility: A Method-Ofmoments Approach Incorporating The Trading RangeDocument27 pagesEfficient Estimation of Intraday Volatility: A Method-Ofmoments Approach Incorporating The Trading RangeEl RuloPas encore d'évaluation
- M147 C10 Soviet KL-1 Instruction Russian PDFDocument2 pagesM147 C10 Soviet KL-1 Instruction Russian PDFEl RuloPas encore d'évaluation
- Alternative 3Document166 pagesAlternative 3Blanca Mayagoitia JaimePas encore d'évaluation
- Measure Theory For DummiesDocument7 pagesMeasure Theory For Dummieswarden80810% (1)
- Decline and Fall of Spanish Merchants in Buenos AiresDocument15 pagesDecline and Fall of Spanish Merchants in Buenos AiresEl RuloPas encore d'évaluation
- Prosodic Phrasing in Argentinean Spanish: Buenos Aires and NeuquénDocument4 pagesProsodic Phrasing in Argentinean Spanish: Buenos Aires and NeuquénEl RuloPas encore d'évaluation
- Alternative 3Document166 pagesAlternative 3Blanca Mayagoitia JaimePas encore d'évaluation
- RevTex Author's GuideDocument16 pagesRevTex Author's GuideEl RuloPas encore d'évaluation
- WHO ArgentinaDocument1 pageWHO ArgentinaEl RuloPas encore d'évaluation
- Maximum Likelihood Estimation of A Compound Poisson ProcessDocument10 pagesMaximum Likelihood Estimation of A Compound Poisson ProcessEl RuloPas encore d'évaluation
- Expectations of A Noncentral Chi-Square Distribution With Application To IID MIMO Gaussian FadingDocument6 pagesExpectations of A Noncentral Chi-Square Distribution With Application To IID MIMO Gaussian FadingEl RuloPas encore d'évaluation
- Panini World Cup 1974 PDFDocument33 pagesPanini World Cup 1974 PDFAndresLeonardoDiazPalmaPas encore d'évaluation
- The Five Cities of Bu Enos Aires: Poverty and Inequality in Urban ArgentinaDocument5 pagesThe Five Cities of Bu Enos Aires: Poverty and Inequality in Urban ArgentinaEl RuloPas encore d'évaluation
- On The Estimation of Security Price Volatility From Historical DataDocument9 pagesOn The Estimation of Security Price Volatility From Historical DataEl RuloPas encore d'évaluation
- VIX Dynamics With Stochastic Volatility of VolatilityDocument30 pagesVIX Dynamics With Stochastic Volatility of VolatilityEl RuloPas encore d'évaluation
- Models For S&P500 DynamicsDocument49 pagesModels For S&P500 DynamicsEl RuloPas encore d'évaluation
- Domain Property Guide 2013Document56 pagesDomain Property Guide 2013El RuloPas encore d'évaluation
- Bachelier Theory of SpeculationDocument47 pagesBachelier Theory of SpeculationEl RuloPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Gracella Irwana - G - Pert 04 - Sia - 1Document35 pagesGracella Irwana - G - Pert 04 - Sia - 1Gracella IrwanaPas encore d'évaluation
- MSDS Leadframe (16 Items)Document8 pagesMSDS Leadframe (16 Items)bennisg8Pas encore d'évaluation
- Buddha Mind PDFDocument32 pagesBuddha Mind PDFVishal GadePas encore d'évaluation
- Brochure - OasisDocument24 pagesBrochure - OasisVivek RPas encore d'évaluation
- Gigabyte Ga b85m Ds3h A r10 PDFDocument30 pagesGigabyte Ga b85m Ds3h A r10 PDFMartha Lorena TijerinoPas encore d'évaluation
- Module 5Document14 pagesModule 5shin rosePas encore d'évaluation
- Banin Cawu 1: Panitia Ujian Perguruan Islam Mathali'Ul FalahDocument4 pagesBanin Cawu 1: Panitia Ujian Perguruan Islam Mathali'Ul FalahKajen PatiPas encore d'évaluation
- Economics - Economics - Cheat - SheetDocument1 pageEconomics - Economics - Cheat - SheetranaurPas encore d'évaluation
- 3DS 2017 GEO GEMS Brochure A4 WEBDocument4 pages3DS 2017 GEO GEMS Brochure A4 WEBlazarpaladinPas encore d'évaluation
- Anykycaccount Com Product Payoneer Bank Account PDFDocument2 pagesAnykycaccount Com Product Payoneer Bank Account PDFAnykycaccountPas encore d'évaluation
- P6 - TT2 - Revision Test 2021-2022 Page 1 of 11Document11 pagesP6 - TT2 - Revision Test 2021-2022 Page 1 of 11Nilkanth DesaiPas encore d'évaluation
- PID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDocument7 pagesPID Marcado Operación Del Paquete Del Compresor de Hidrogeno PHP-K-002 PDFDenisPas encore d'évaluation
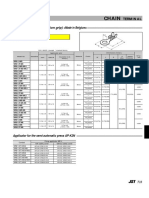
- Chain: SRB Series (With Insulation Grip)Document1 pageChain: SRB Series (With Insulation Grip)shankarPas encore d'évaluation
- Charles Zastrow, Karen K. Kirst-Ashman-Understanding Human Behavior and The Social Environment-Thomson Brooks - Cole (2007)Document441 pagesCharles Zastrow, Karen K. Kirst-Ashman-Understanding Human Behavior and The Social Environment-Thomson Brooks - Cole (2007)joan82% (17)
- Maskote WB Zinc Stop-OffDocument7 pagesMaskote WB Zinc Stop-OffbondsivamaniPas encore d'évaluation
- 한국항만 (영문)Document38 pages한국항만 (영문)hiyeonPas encore d'évaluation
- QSasDocument50 pagesQSasArvin Delos ReyesPas encore d'évaluation
- Ortho TechnologyDocument196 pagesOrtho Technologyr3doc3Pas encore d'évaluation
- Aex-Kissan KeralaDocument25 pagesAex-Kissan Keralabsh08070Pas encore d'évaluation
- Chapter 1 INTRODUCTION TO LITERATUREDocument4 pagesChapter 1 INTRODUCTION TO LITERATUREDominique TurlaPas encore d'évaluation
- Unit 1 Building A Professional Relationship Across CulturesDocument16 pagesUnit 1 Building A Professional Relationship Across CulturesAlex0% (1)
- S3 U4 MiniTestDocument3 pagesS3 U4 MiniTestĐinh Thị Thu HàPas encore d'évaluation
- Ec 0301Document25 pagesEc 0301Silvio RomanPas encore d'évaluation
- Swot Analysis of Indian EconomyDocument2 pagesSwot Analysis of Indian EconomymyeyesrbeautPas encore d'évaluation
- Abdominal Migraine and HomoeopathyDocument17 pagesAbdominal Migraine and HomoeopathyDr. Rajneesh Kumar Sharma MD HomPas encore d'évaluation
- RS2 Stress Analysis Verification Manual - Part 1Document166 pagesRS2 Stress Analysis Verification Manual - Part 1Jordana Furman100% (1)
- Zillah P. Curato: ObjectiveDocument1 pageZillah P. Curato: ObjectiveZillah CuratoPas encore d'évaluation
- Chudamani Women Expecting ChangeDocument55 pagesChudamani Women Expecting ChangeMr AnantPas encore d'évaluation
- BLG311 Cell Biology: Course Outline (Fall 2020)Document11 pagesBLG311 Cell Biology: Course Outline (Fall 2020)Emilija BjelajacPas encore d'évaluation
- Technical Rockwell Automation FactoryTalk HistorianDocument6 pagesTechnical Rockwell Automation FactoryTalk HistorianAmit MishraPas encore d'évaluation