Proceedings of RIT 2013 Vibrations Technical Conference RIT/VTC 2013 December 16, 2013, Rochester, NY, USA
VTC2013-1
ECCENTRIC MASS DYNAMIC VIBRATION ABSORBER
Timothy G. Southerton, Brian T. Grosso, Kyle J. Lasher Kate Gleason College of Engineering Department of Mechanical Engineering Rochester Institute of Technology Rochester, New York, 14623 Email: tgs5800@ rit.edu, btg9033@rit.edu, kjl9989@rit.edu
ABSTRACT A physical model used to demonstrate the use of a passive dynamic vibration absorber (DVA) to cancel out resonance of a classic mass spring damper system was developed for this project. It incorporates an eccentric mass as a rotational unbalance to generate movement with two degrees of freedom (DOF). The excitation frequency can be manually controlled to demonstrate discussed phenomena of a two mass system. In this paper, a vibratory model of a mass-spring-damper system is developed and compared with experimental results measured from the physical model. From this it is concluded that the theoretical model accurately reflects the real world results with minimal deviations. These differences are due to broad assumptions made in the theoretical development, so we can conclude that the model is valid. INTRODUCTION Dynamic vibration absorbers are very fundamental devices when it comes to vibration management in systems, and their effects are interesting to even those outside of the field of engineering. The concept behind these passive components is simply to add a spring and mass that have a natural frequency tuned to that of the resonant excitation frequency of the system. Doing so transfers all of the resonance energy of the system to the DVA, leaving the original system undisturbed. However, the classic model of the vertical 2DOF springmass-damper system with a DVA is not widely available to demonstrate this phenomenon, so this project targeted creating this system with low-cost components as a demonstration for the Introduction to Engineering Vibrations class. Due to the availability of electronic components from other coursework, it was decided that an electric motor with an unbalanced mass is the most effective way to generate a periodic applied force in the system so that the excitation frequency can be controlled. The biggest challenge in making a physical model of this 2DOF system is constraining the motion, for which there are a
variety of solutions ranging widely in price. For this we chose an available middle ground that allowed for reasonable data collection, but significant improvements could be made to the experimental setup by using linear bearings and precision mounted slides. This paper focuses on comparing the theoretical results of the methods developed in class for a 2DOF DVA model to the data measured from the physical model to identify the validity of the development. Budget and time constrained fabrication and testing, but we were able to develop a reasonably robust first prototype of this system and to record relatively accurate displacement amplitudes for comparison. There is much that could be done to this design in the future to further characterize or improve the system performance, but this is outside of the scope we have developed. PHYSICAL MODEL For this project, a physical model of the system was developed using available materials, as can be seen in Fig. 1. The frame is 12" x 21.5" and is made from a 1x2x8 furring strip [1]. A Jameco ReliaPro 161382 geared motor that was salvaged from a previous project is used to provide the periodic input force [2]. The eccentric and DVA masses are machined pieces of brass stock which we were given for free from the RIT machine shop. For the platform a machined aluminum bar is used that has four #8-32 clearance holes drilled at each corner, in which eye bolts are mounted [3]. A tapped #8-32 hole on the bottom in the center of the platform provides the mounting location for the eye bolt from which the DVA is suspended. Motor clamping to the platform is accomplished using two 2" #8-32 cap screws from the machine shop in tapped holes. A Lexan motor mount was made and sanded to give a frosted texture after being recycled from a previous project. The DVA mass is constrained similarly using a Lexan piece with two 5/16" holes for the motion constraining rods, and is connected to the DVA mass using a #8-32 eye bolt. 1/4" steel tubes that are mounted through the furring strips at the top
Force (N)
and bottom of the frame are used as constraining rods for system motion. To reduce pitching of the platform, 2" pieces of 3/8" copper tubing were secured through holes in the platform using adhesive. These work as minimal friction slides on the steel constraining bars which do not bind. Four extension springs are attached to eye hooks in the top of the frame and are used to hang the platform [4, 5]. A spring that is slightly less stiff is used to hang the DVA from the platform. The electrical drive for the motor is a custom-built voltage regulator circuit connected to the motor with very light speaker wire to reduce unwanted constraints on the system motion. This unregulated DC power supply is 12VDC and 600mA, which feeds a LM317 regulator with heat sink through the circuit given in the datasheet. The regulator supplies from 1.25 to 11.75V to the motor with up to 1.5A of current [6].
Spring Stiffness
1.4 1.2 1.0 0.8 0.6 0.4
Spring
LB LF RF RB DVA 0.05 0.10 0.15
0.2
0.0 0.00
Spring Stretch (m) FIGURE 3. SPRING STIFFNESS PLOTS MODEL DEVELOPMENT
FIGURE 1. DAMPER TEST STAND SYSTEM CHARACTERIZATION In order to characterize our model, data was taken on the system components using a triple beam balance from the Systems lab along with hanging masses. Every spring was measured individually using four mass increments so that trend lines could be fit to calculate each stiffness value. Each component used for the platform and DVA assemblies was also weighed individually. The resulting system characterization values can be seen in Fig. 2. Spring stiffness graphs proved reasonably similar and linear, which can be seen in Fig. 3. Variable m1 m2 m0 e kLB kLF kRF kRB k1 k2 Item Platform mass Absorber mass Eccentric mass Eccentricity Left back spring stiffness Left front spring stiffness Right back spring stiffness Right back spring stiffness Eq. platform spring stiffness Absorber spring stiffness Value 361.5 82.8 68.5 22.8 9.95 9.64 9.59 9.68 38.86 8.91 Units g g g mm N/m N/m N/m N/m N/m N/m
FIGURE 4. SYSTEM SCHEMATIC Assumptions 1 Degree of motion, 2 degree of freedom system o No platform pitch, roll, yaw, horizontal motion etc... Frictionless, undamped motion Motor spins at a constant speed o Ignore effect of gravity on spinning mass Linear range of spring operation o Not bottoming out or over-stretching Frame is rigid and does not vibrate
From the system schematic in Fig. 4 and using the assumptions above, the system equation in Eq. 1 can be derived, which characterizes the vibratory system [7]. [ 1 0 ( + 2 ) 0 1 ]( )+ [ 1 2 2 2 2 1 sin() ]( ) = ( 0 ) (1) 2 2 0
Using the complex method, the global frequency response function (FRF) can be calculated directly, as in Eq. 2 and 3.
FIGURE 2. SYSTEM CHARACTERIZATION VALUES
(rad/s)
= 1 2 1 + 1 + 2 2 [ ] = 2 2 2 + 2 2 2 1 2 + 2 [ ] 2 2 1 + 1 + 2
2 = (2 1 + 1 + 2 )(2 2 + 2 ) 2
[] = [2 [] + []]
Motor Voltage vs.
25
20 (2) (3) 15 10 5 0 0 y = 1.7869x - 0.6166 R = 0.9995 (4) 5 10 Applied Voltage (V) 15
The amplitude of the displacements of the platform and DVA predicted by this model can be found directly from the global FRF as in Eq. 4 and 5. 11 = |11 ()|0 = |11 ()|0 2 11 = |(2
2 1 +1 +2 )(2 2 +2 )2
(2 2 +2 )0 2
FIGURE 5. MOTOR VOLTAGE VS. ROTATIONAL SPEED PLOT Static deflections of the platform alone, the platform with the DVA, and the DVA were first recorded as reference points. The voltage was then first swept over the range of available values (1.25-11.75V) in increments and the displacement amplitude of the platform alone were taken by holding a ruler parallel to the base and stopping it at the point where the mass stopped contacting, which was marked and measured on the frame. This provided the experimental reference data for the 1DOF system that we attempted to stop at resonance. The DVA was then connected and the process was repeated, recording both platform and DVA amplitudes. Multiple points where then taken later at voltage values around the points of resonance to provide more clarity for the system's real world response. RESULTS COMPARISON Data collected was plotted in MATLAB along with theoretical model displacement amplitude response with respect to excitation frequency using the MATLAB code found in Appendix A of this paper and the recorded Excel data found in Appendix B. The resulting platform displacement amplitude plot of the experimental vs. theoretical results for the 1DOF system overlaid on the results for the 2DOF system can be seen in Fig. 6. Similarly, the resulting DVA displacement amplitude plot of the experimental vs. theoretical results for the 2DOF system can be seen in Fig. 7.
21 = |21 ()|0 = |21 ()|0 2 21 = |(2
2 1 +1 +2 )(2 2 +2 )2
(2 )0 2
(5)
These equations can be used to produce the displacement amplitude response with respect to excitation frequency for the vibratory system. Also worth calculating directly are the system natural frequencies, which can also be established graphically from the global FRF. From Fig. 2, the platform and absorber natural frequencies are calculated using Eq. 6 and 7, respectively. 11 =
1 1
= 10.4 rad/s
(6)
22 = 2 = 10.4 rad/s
2
(7)
For comparison purposes, the system can be modeled without the DVA, which is a simple 1DOF rotating unbalance system with no damping. The resulting displacement amplitude response equation with respect to excitation frequency can be seen in Eq. 8, with r = / n.
0 0 = (1 2)
(8)
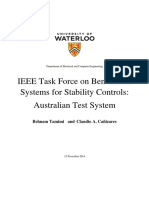
DATA COLLECTION Using the access hatch on the regulator enclosure, the wires for the motor were disconnected from the power connector and a voltmeter was hooked up in parallel with the motor to record voltage values while testing. Rotational speeds in rev/s were calculated from time values taken by using a stopwatch to time 20 revolutions of the eccentric mass at lower rotational speeds. Videos were taken of the system at higher rotational speeds and the time taken for each revolution of the mass was established by stepping frame-by-frame through the video and averaging three sample revolutions. These sample points were used to establish a voltage vs. rotational speed trend from which the excitation frequency was calculated for different voltage values. This can be seen in Fig. 5. FIGURE 6. DISPLACEMENT AMPLITUDE RESPONSE VS. FREQUENCY FOR SYSTEM PLATFORM
stiffnesses. The rig also exhibits some vibratory effects as it is not perfectly rigid, which is also a budgetary constraint and adds to error in the experimental values. However, we can see from the results comparison that the accumulation of errors due to the differences between the real world model and our assumptions in the theoretical model still produce favorable agreement. From this we can conclude that the physical model is an accurate representation of the system targeted, and that the theoretical model produces valid results. REFERENCES [1] 1 x 2 x 8 Furring Strip. (n.d.). www.homedepot.com. Retrieved December 4, 2013, from http://www.homedepot.com/p/Unbranded-1-x-2-x-8Furring-Strip-160954/100075477?cm_sp=BazVoice-_RLP-_-100075477-_-x#.Up_LrcRDuSo [2] Jameco Electronics. (n.d.). Jameco ReliaPro. Retrieved December 4, 2013, from http://www.jameco.com/webapp/ wcs/stores/servlet/Product_10001_10001_161382_-1 [3] #8-32 x 1-5/8 in. Zinc-Plated Steel Eye Bolts with Nuts (2Pack). (n.d.). www.homedepot.com. Retrieved December 4, 2013, from http://www.homedepot.com/p/Unbranded-832-x-1-5-8-in-Zinc-Plated-Steel-Eye-Bolts-with-Nuts-2Pack-14331/202704409#.Up_MocRDuSo [4] Everbilt 5/32 in. x 2-1/2 in. and 1/4 in. x 2-1/2 in. Zinc Plated Extension Springs (4-Pack). (n.d.). www.homedepot.com. Retrieved December 4, 2013, from http://www.homedepot.com/p/Everbilt-5-32-in-x-2-1-2-inand-1-4-in-x-2-1-2-in-Zinc-Plated-Extension-Springs-4Pack-16080/202045471?keyword=760804# .Up_NnsRDuSo [5] #6 Zinc-Plated Screw Hooks (25-Pack). (n.d.). www.homedepot.com. Retrieved December 4, 2013, from http://www.homedepot.com/p/Unbranded-6-Zinc-PlatedScrew-Hooks-25-Pack14092/100338097#.Up_OE8RDuSo [6] KA317 / LM317 3-Terminal Positive Adjustable Regulator. (n.d.). Fairchild Semiconductor. Retrieved December 4, 2013, from http://www.fairchildsemi.com/ds/LM/LM317.pdf [7] Inman, D. J. (2014). Engineering Vibration (4 ed.). Upper Saddle River, N.J.: Pearson Education, Inc.
FIGURE 7. DISPLACEMENT AMPLITUDE RESPONSE VS. FREQUENCY FOR SYSTEM DVA CONCLUSIONS As can be seen in Fig. 6, the experimental data for the platform matches very well with the theoretical calculations for the 1DOF system. We were limited in the precision of the excitation frequency adjustment due to the potentiometer used, so it is reasonable to assume that the experimental and theoretical values are the same at the natural frequency of the platform (10.4 rad/s). For higher excitation frequencies in the 1DOF system, the displacement measured is slightly lower than predicted, which we attribute to errors in our amplitude measurements. However, the amplitude values still trend as predicted by the model. Similarly, at low excitation frequencies, the motion was so small that we could not measure movement accurately, but it was very nearly zero as predicted. For the 2DOF results in Fig. 6, the same effects as noted in the 1DOF system can be seen at the new resonances. Notably here, at the second resonance the motion of the system was so chaotic that the DVA would sometimes hit the bottom of the rig and completely unload the DVA spring. These sort of effects led to the use of estimated values for the platform and DVA amplitudes at the second natural frequency, which can be seen as outliers in the figures. For the frequency at which 1DOF resonance occurs, the 2DOF experimental setup showed the predicted attenuation. At the first 2DOF natural frequency, the resonance amplitude is small due mainly to the variable speed of the motor. This variable speed is due to the increased torque required to raise the eccentric mass vs. lowering it, which is more notable at lower excitation frequencies (when there is less rotational inertia). From Fig. 7, we can see that the discussed effects on the platform are translated directly to the DVA, which shows the same trends. The experimental results compare favorably with the model for the DVA amplitudes, which adds even more merit to the validity of the model. Overall, the experimental results were influenced by the unavoidable existence of friction (or dissipative losses) in the system and the ability of the platform to pitch from side to side. This pitching is due to wide clearances between the copper sleeves and the steel rods to prevent binding, which was a budgetary constraint for the project. The rig also seems to pitch more on the left side of the platform than the right, which could be due to positioning of the motor or slight differences in spring
Vous aimerez peut-être aussi
- Eccentric Mass Dynamic Vibration Absorber TGS-BTG-KJLDocument6 pagesEccentric Mass Dynamic Vibration Absorber TGS-BTG-KJLsouthertontimothy100% (2)
- ESA322 Dynamic Vibration Absorber ProjectDocument15 pagesESA322 Dynamic Vibration Absorber ProjectAhmad ShaqeerPas encore d'évaluation
- Undamped Vibration Absorber - v3Document14 pagesUndamped Vibration Absorber - v3prem_chaurasiyaaPas encore d'évaluation
- Torsional Vibration Spread SheetDocument14 pagesTorsional Vibration Spread SheetRPDeshPas encore d'évaluation
- Books On RotordynamicsDocument4 pagesBooks On Rotordynamicsshah_aditk100% (1)
- Experimental Analysis of Screw Compressor Noise and VibrationDocument18 pagesExperimental Analysis of Screw Compressor Noise and VibrationBayu SuprayogiPas encore d'évaluation
- Balancing Overhung Rotors PDFDocument2 pagesBalancing Overhung Rotors PDFDidit Gencar LaksanaPas encore d'évaluation
- Impact Hammer Product DataDocument4 pagesImpact Hammer Product DatasadettinorhanPas encore d'évaluation
- Practical Use of Dynamic Vibration AbsorbersDocument4 pagesPractical Use of Dynamic Vibration AbsorbersDan-jones TudziPas encore d'évaluation
- Rotary Lobe Blower Vibration GuideDocument6 pagesRotary Lobe Blower Vibration GuideJoako TorresPas encore d'évaluation
- Interturn Short-Circuit Detector For Turbine-Generator Rotor WindingsDocument6 pagesInterturn Short-Circuit Detector For Turbine-Generator Rotor WindingsEng Bagaragaza Romuald100% (1)
- Forced Vibrations of A BeamDocument13 pagesForced Vibrations of A BeamMuhammad Daud Abu Bakar100% (1)
- Evaluation of COMSOL Multiphysics For Rotordynamical AnalysisDocument49 pagesEvaluation of COMSOL Multiphysics For Rotordynamical AnalysisPushkar PanditPas encore d'évaluation
- Optimal Design of A Damped Dynamic Vibration AbsorberDocument21 pagesOptimal Design of A Damped Dynamic Vibration AbsorberShrikant DholePas encore d'évaluation
- Critical Speed PDFDocument10 pagesCritical Speed PDFParamasivam VeerappanPas encore d'évaluation
- Tute Lea 2013Document6 pagesTute Lea 2013venkatachalamPas encore d'évaluation
- Full 62625Document10 pagesFull 62625Brian FreemanPas encore d'évaluation
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiPas encore d'évaluation
- Data 1 DuaDocument8 pagesData 1 Duadodol garutPas encore d'évaluation
- Journal Paper 3Document12 pagesJournal Paper 3Jafaru UsmanPas encore d'évaluation
- Ga Speed and DQ Currnets Control of PMSM WithDocument9 pagesGa Speed and DQ Currnets Control of PMSM Withhieuhuech1Pas encore d'évaluation
- A Simple Direct-Torque Neuro-Fuzzy Control of PWM-Inverter-Fed Induction Motor DriveDocument8 pagesA Simple Direct-Torque Neuro-Fuzzy Control of PWM-Inverter-Fed Induction Motor DrivegsmaniprabaPas encore d'évaluation
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDocument11 pagesModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranPas encore d'évaluation
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviPas encore d'évaluation
- A Novel Current Controlled Space Vector Modulation Based Control Scheme For Reducing Torque Ripple in Brushless DC DrivesDocument7 pagesA Novel Current Controlled Space Vector Modulation Based Control Scheme For Reducing Torque Ripple in Brushless DC DrivesKoukou AmkoukouPas encore d'évaluation
- 2Document6 pages2Sairam SaiPas encore d'évaluation
- Transient Stability Analysis of Power System Using MatlabDocument5 pagesTransient Stability Analysis of Power System Using MatlabSaddam HussainPas encore d'évaluation
- Application of Space Vector Modulation in Direct Torque Control of PMSMDocument4 pagesApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilPas encore d'évaluation
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulPas encore d'évaluation
- JESV5SI0109Document5 pagesJESV5SI0109Kiran YaddanapudiPas encore d'évaluation
- An Experimental Web Tension Control System: System Set-Up: Giannoccaro, N.I. Oishi, K. & Sakamoto, TDocument0 pageAn Experimental Web Tension Control System: System Set-Up: Giannoccaro, N.I. Oishi, K. & Sakamoto, TSheik HassanPas encore d'évaluation
- Using Twenty Four Pulse AC-DC Converter Employing Pulse Doubling TechniqueDocument11 pagesUsing Twenty Four Pulse AC-DC Converter Employing Pulse Doubling Techniquebakien-canPas encore d'évaluation
- Dynamic D-Q Axis Modeling of Three-Phase Asynchronous Machine Using MatlabDocument10 pagesDynamic D-Q Axis Modeling of Three-Phase Asynchronous Machine Using MatlabTaoufikElKanouniPas encore d'évaluation
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Zlatka Tecec Kvalifikacijki Ispit Rad EngDocument6 pagesZlatka Tecec Kvalifikacijki Ispit Rad EngkurabyqldPas encore d'évaluation
- Project Report DCSDocument51 pagesProject Report DCSEngr XamirPas encore d'évaluation
- A Direct Torque Controlled Induction Motor With Variable Hysteresis BandDocument6 pagesA Direct Torque Controlled Induction Motor With Variable Hysteresis BandMuhammad SaadPas encore d'évaluation
- Design of Magnetic Levitation System Undergraduate: A Control An ProjectDocument5 pagesDesign of Magnetic Levitation System Undergraduate: A Control An ProjectIshrat JamalPas encore d'évaluation
- 2 Muhammad RehanDocument7 pages2 Muhammad Rehanengrzee5516Pas encore d'évaluation
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaPas encore d'évaluation
- Investigation and Comparative Study of A New Direct Torque Control Strategy Based On A Well-Balanced Multilevel InverterDocument8 pagesInvestigation and Comparative Study of A New Direct Torque Control Strategy Based On A Well-Balanced Multilevel InverterInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Power System Case StudyDocument18 pagesPower System Case Studysmurf aldous100% (1)
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourPas encore d'évaluation
- The International Conference On Renewable Energies: "ICRE-2010"Document30 pagesThe International Conference On Renewable Energies: "ICRE-2010"M VetriselviPas encore d'évaluation
- Australian - Reduced - Model - 14 - Generator - System - DSAT - Study - ReportDocument5 pagesAustralian - Reduced - Model - 14 - Generator - System - DSAT - Study - Reportmachine learningPas encore d'évaluation
- Influence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationDocument5 pagesInfluence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationBOUZ2010Pas encore d'évaluation
- Inverter Grid Synchronization-A Review and Simulation: Ms. Prajakta R. Narkhede, Dr.P.J.ShahDocument11 pagesInverter Grid Synchronization-A Review and Simulation: Ms. Prajakta R. Narkhede, Dr.P.J.ShahPrajakta dahakePas encore d'évaluation
- MATLAB Speed Control DC MotorDocument4 pagesMATLAB Speed Control DC MotorEngineering and Scientific International JournalPas encore d'évaluation
- Performance Improvement of BLDC Motor With Hysteresis Current ControllerDocument8 pagesPerformance Improvement of BLDC Motor With Hysteresis Current ControllerRaja BalanPas encore d'évaluation
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaPas encore d'évaluation
- The Optimized Bridge-Leg Power Switch Circuit for Increased EfficiencyDocument4 pagesThe Optimized Bridge-Leg Power Switch Circuit for Increased EfficiencyefremofePas encore d'évaluation
- MMF Control Algorithm For Torque and Speed Ripple Reduction in BLDC MotorDocument8 pagesMMF Control Algorithm For Torque and Speed Ripple Reduction in BLDC MotorLavanya ChandranPas encore d'évaluation
- Ijrte0205288291 PDFDocument4 pagesIjrte0205288291 PDFPasupuleti SivakumarPas encore d'évaluation
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيPas encore d'évaluation
- Wind Turbine Doubly-Fed Induction Generator Defects Diagnosis Under Voltage DipsDocument13 pagesWind Turbine Doubly-Fed Induction Generator Defects Diagnosis Under Voltage DipsTELKOMNIKAPas encore d'évaluation
- Transient Stability Analysis and Enhancement of Ieee-9 Bus SystemDocument11 pagesTransient Stability Analysis and Enhancement of Ieee-9 Bus SystemNirmal mehtaPas encore d'évaluation
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992Pas encore d'évaluation
- Li 2019 J. Phys. Conf. Ser. 1302 022054 PDFDocument8 pagesLi 2019 J. Phys. Conf. Ser. 1302 022054 PDFsalah eddinePas encore d'évaluation
- Mitigation Stick SlipDocument6 pagesMitigation Stick SlipCarlos SensanoPas encore d'évaluation
- Heat Analysis of Spicy Foods by HPLCDocument2 pagesHeat Analysis of Spicy Foods by HPLCTrevor LundPas encore d'évaluation
- Tensile Testing Apparatus Design with 220000 N Load LimitDocument5 pagesTensile Testing Apparatus Design with 220000 N Load LimitMunir EffendyPas encore d'évaluation
- ISO 8573 Purity Classes PDFDocument1 pageISO 8573 Purity Classes PDFOky Andytya PratamaPas encore d'évaluation
- Determine pKa of Potassium Hydrogen Phthalate via Potentiometric TitrationDocument5 pagesDetermine pKa of Potassium Hydrogen Phthalate via Potentiometric TitrationSheenly Anne SaavedraPas encore d'évaluation
- Fundamentals of Photoelastic Stress AnalysisDocument48 pagesFundamentals of Photoelastic Stress AnalysiserickPas encore d'évaluation
- Homogeneous CoordinatesDocument27 pagesHomogeneous CoordinatesGogyPas encore d'évaluation
- Phys 1004 - Cheat - Sheet. Electromagnetism and WavesDocument2 pagesPhys 1004 - Cheat - Sheet. Electromagnetism and WavesNadya B.Pas encore d'évaluation
- Newton's Laws of Motion ExperimentDocument3 pagesNewton's Laws of Motion ExperimentMartie DuranaPas encore d'évaluation
- Topic 7 Problem Set 2016Document9 pagesTopic 7 Problem Set 2016Paul AmezquitaPas encore d'évaluation
- CO2 Car Project Workbook 2010 ENGDocument178 pagesCO2 Car Project Workbook 2010 ENGhamidhard100% (2)
- Theoretical Physics 1: Brwebberandchwbarnes Michaelmas Term 2008Document73 pagesTheoretical Physics 1: Brwebberandchwbarnes Michaelmas Term 200821260paco61Pas encore d'évaluation
- Geotechnical Aspects of Building Design (EN 1997) : Eurocode 2Document55 pagesGeotechnical Aspects of Building Design (EN 1997) : Eurocode 2margitorsiPas encore d'évaluation
- Weldox 1100 Structural SteelDocument2 pagesWeldox 1100 Structural SteelAndrewFranciscoPas encore d'évaluation
- FP A08e15 Od01 - DS - 0 0 5 PDFDocument2 pagesFP A08e15 Od01 - DS - 0 0 5 PDFYura DankoPas encore d'évaluation
- CAESAR II MAX Combination LoadCaseDocument2 pagesCAESAR II MAX Combination LoadCasePrashant ChauhanPas encore d'évaluation
- Formula RioDocument82 pagesFormula RioLuis RoblesPas encore d'évaluation
- Corning CRN 24 ALTOS 24FDocument3 pagesCorning CRN 24 ALTOS 24FSosialPas encore d'évaluation
- ME424 201516 Unit2Document29 pagesME424 201516 Unit2harsha100% (1)
- 4439testing MultipleDocument4 pages4439testing MultipleSonny RamosPas encore d'évaluation
- Lab Report 2Document3 pagesLab Report 2ChristianPas encore d'évaluation
- UV Visible SpectrosDocument8 pagesUV Visible Spectrosbarani_autPas encore d'évaluation
- Algebra PDFDocument2 pagesAlgebra PDFpalle sandhyaPas encore d'évaluation
- Matrix Acidizing Course PDFDocument74 pagesMatrix Acidizing Course PDFBehzad Hosseinzadeh100% (1)
- Science of Releasing: An Introduction To The 4-Stage Release RundownDocument46 pagesScience of Releasing: An Introduction To The 4-Stage Release Rundownalkaro288% (8)
- Interpretation CPTDocument5 pagesInterpretation CPTNadeem AbbasiPas encore d'évaluation
- Supersonic Flow Over A Wedge (Oblique Shock Problem)Document29 pagesSupersonic Flow Over A Wedge (Oblique Shock Problem)sameer100% (2)
- Portal FrameDocument7 pagesPortal FrameAzzren Azzrain100% (2)
- PVn = C: Guide to Polytropic ProcessesDocument2 pagesPVn = C: Guide to Polytropic ProcessesbabePas encore d'évaluation
- Take Home AssignmentDocument3 pagesTake Home AssignmentNadia FadhilaPas encore d'évaluation
- FRP Column AbaqusDocument14 pagesFRP Column AbaqusAlvin PurmawinataPas encore d'évaluation