Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- 1586 C025Document6 pages1586 C025Engr Shahnawaz GhanchiPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- 1586 C027Document15 pages1586 C027Engr Shahnawaz GhanchiPas encore d'évaluation
- Wind Effects: Timothy A. Reinhold Ben L. SillDocument6 pagesWind Effects: Timothy A. Reinhold Ben L. SillEngr Shahnawaz GhanchiPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 1586 C023Document13 pages1586 C023Engr Shahnawaz GhanchiPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- 1586 C020Document9 pages1586 C020Engr Shahnawaz GhanchiPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Test Equipment and Measuring InstrumentsDocument10 pagesTest Equipment and Measuring InstrumentsEngr Shahnawaz GhanchiPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- 1586 C018Document13 pages1586 C018Engr Shahnawaz GhanchiPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- 1586 C022Document12 pages1586 C022Engr Shahnawaz GhanchiPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- 1586 C024Document14 pages1586 C024Engr Shahnawaz GhanchiPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- 1586 C016Document16 pages1586 C016Engr Shahnawaz GhanchiPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- 1586 C021Document19 pages1586 C021Engr Shahnawaz GhanchiPas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- 1586 C001Document15 pages1586 C001ioanciorneiPas encore d'évaluation
- 1586 C013Document13 pages1586 C013Engr Shahnawaz GhanchiPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- 1586 C017Document20 pages1586 C017Engr Shahnawaz GhanchiPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- 1586 C003Document13 pages1586 C003Engr Shahnawaz GhanchiPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- 1586 C011Document6 pages1586 C011Engr Shahnawaz GhanchiPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Free Vibration, Natural Frequencies, and Mode Shapes: 14.1 Basic PrinciplesDocument11 pagesFree Vibration, Natural Frequencies, and Mode Shapes: 14.1 Basic PrinciplesEngr Shahnawaz GhanchiPas encore d'évaluation
- 1586 C007Document7 pages1586 C007Engr Shahnawaz GhanchiPas encore d'évaluation
- 1586 C008Document8 pages1586 C008Engr Shahnawaz GhanchiPas encore d'évaluation
- 1586 C009Document7 pages1586 C009Engr Shahnawaz GhanchiPas encore d'évaluation
- 1586 C002Document12 pages1586 C002Engr Shahnawaz GhanchiPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 6.1 Shear Stresses in Rectangular BeamsDocument8 pages6.1 Shear Stresses in Rectangular BeamsioanciorneiPas encore d'évaluation
- 1586 C004Document11 pages1586 C004Engr Shahnawaz GhanchiPas encore d'évaluation
- 1586 C012Document12 pages1586 C012Engr Shahnawaz GhanchiPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- 1586 C010Document12 pages1586 C010Engr Shahnawaz GhanchiPas encore d'évaluation
- 1586 C005Document8 pages1586 C005Engr Shahnawaz GhanchiPas encore d'évaluation
- Construction Project ManagementDocument137 pagesConstruction Project ManagementJavier F. Via Giglio92% (13)
- Itmf 2013 11 Sperling EnuDocument5 pagesItmf 2013 11 Sperling EnubcqbaoPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Chapter 1 - MsiDocument81 pagesChapter 1 - MsiYua CincoPas encore d'évaluation
- Electric and Magnetic States of Matter MagnetismDocument18 pagesElectric and Magnetic States of Matter MagnetismNittam ThakurPas encore d'évaluation
- York Chilers EngDocument10 pagesYork Chilers EngBulclimaPas encore d'évaluation
- Added MassDocument3 pagesAdded MassAli PungaPas encore d'évaluation
- 1 Exe3 SolDocument2 pages1 Exe3 SolTarak BENSLIMANEPas encore d'évaluation
- Worldviews, Science and Us - Philosophy and Complexity - Carlos Gershenson, Diederik Aerts, Bruce EdmondsDocument359 pagesWorldviews, Science and Us - Philosophy and Complexity - Carlos Gershenson, Diederik Aerts, Bruce EdmondsNicolas GilibertiPas encore d'évaluation
- Particle Model of MatterDocument25 pagesParticle Model of Matterapi-422428700Pas encore d'évaluation
- Beam Calculator Online (Calculate The Reactions, Draws Bending Moment, Shear Force, Axial Force) PDFDocument5 pagesBeam Calculator Online (Calculate The Reactions, Draws Bending Moment, Shear Force, Axial Force) PDFEngr Ishfaque TunioPas encore d'évaluation
- Input Data: Project Usan Deep Water Attachment XXXXXX To Calculation Note Ref. Yyyyyyyyy Rev. ZZDocument5 pagesInput Data: Project Usan Deep Water Attachment XXXXXX To Calculation Note Ref. Yyyyyyyyy Rev. ZZcatullusPas encore d'évaluation
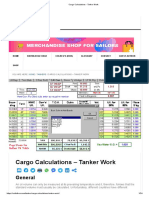
- Cargo Calculations - Tanker WorkDocument24 pagesCargo Calculations - Tanker WorkVasil Raykov100% (1)
- Mechanics of Materials: Chong Zhou, Jin Y. OoiDocument8 pagesMechanics of Materials: Chong Zhou, Jin Y. OoiKent Emmanuel C. SoriaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Dynamics of ThermometerDocument12 pagesDynamics of ThermometerSaumya Agrawal100% (1)
- MD1-0-E-505!06!00001 Generator Transformer Sizing CalculationDocument19 pagesMD1-0-E-505!06!00001 Generator Transformer Sizing Calculationtvpham12350% (2)
- Final 08 Engg SolDocument6 pagesFinal 08 Engg SolyanelaPas encore d'évaluation
- Levers:: Pivoted About The FulcrumDocument14 pagesLevers:: Pivoted About The Fulcrum01parthPas encore d'évaluation
- Self Assembled MonolayersDocument64 pagesSelf Assembled MonolayersPraveen KumarPas encore d'évaluation
- Normativ Panouri SandwichDocument58 pagesNormativ Panouri SandwichAlex ChiraPas encore d'évaluation
- Centrifugal or Centripetal ForceDocument3 pagesCentrifugal or Centripetal ForceGianne Karl AlmarinesPas encore d'évaluation
- Tipler and Mosca Physics For Scientists and Engineers Solutions Manual Chapter 13Document102 pagesTipler and Mosca Physics For Scientists and Engineers Solutions Manual Chapter 13Nate LinxPas encore d'évaluation
- Solidification and Crystalline Imperfection Part 1Document25 pagesSolidification and Crystalline Imperfection Part 1Aiman MutallidPas encore d'évaluation
- Synchronous Motor Control PDFDocument20 pagesSynchronous Motor Control PDFPradeep_VashistPas encore d'évaluation
- Maharashtra Board Solutions Class 11 Physics - Chapter 10 ElectrostaticsDocument24 pagesMaharashtra Board Solutions Class 11 Physics - Chapter 10 ElectrostaticsManveer SingPas encore d'évaluation
- Cam Design Cam Design: Output FunctionDocument54 pagesCam Design Cam Design: Output FunctionasritaipPas encore d'évaluation
- Equilibrium of Rigid Bodies Unit - IIDocument36 pagesEquilibrium of Rigid Bodies Unit - IIArkadeep MukherjeePas encore d'évaluation
- High Voltage Lecture - 8Document33 pagesHigh Voltage Lecture - 8Mansoor SarwarPas encore d'évaluation
- Exploring Science International ContentsDocument4 pagesExploring Science International ContentsR S67% (6)
- Chapter 5 Flexural MembersDocument40 pagesChapter 5 Flexural MembersAriel Dela CruzPas encore d'évaluation
- 1st Year ENTRY TEST PAPER MT-2Document3 pages1st Year ENTRY TEST PAPER MT-2Shahzad AslamPas encore d'évaluation
- Lecture 8 Notes, Electromagnetic Theory II: 1. Scattering IntroductionDocument10 pagesLecture 8 Notes, Electromagnetic Theory II: 1. Scattering Introduction*83*22*Pas encore d'évaluation
- STEM Labs for Physical Science, Grades 6 - 8D'EverandSTEM Labs for Physical Science, Grades 6 - 8Évaluation : 3.5 sur 5 étoiles3.5/5 (6)
- How to Teach Nature Journaling: Curiosity, Wonder, AttentionD'EverandHow to Teach Nature Journaling: Curiosity, Wonder, AttentionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- A-level Biology Revision: Cheeky Revision ShortcutsD'EverandA-level Biology Revision: Cheeky Revision ShortcutsÉvaluation : 5 sur 5 étoiles5/5 (5)
- Lower Secondary Science Workbook: Stage 8D'EverandLower Secondary Science Workbook: Stage 8Évaluation : 5 sur 5 étoiles5/5 (1)
- Nature-Based Learning for Young Children: Anytime, Anywhere, on Any BudgetD'EverandNature-Based Learning for Young Children: Anytime, Anywhere, on Any BudgetÉvaluation : 5 sur 5 étoiles5/5 (1)