Vous aimerez peut-être aussi
- Caso 5Document6 pagesCaso 5Mauricio Jarandilla NuñezPas encore d'évaluation
- Dafo HondaDocument5 pagesDafo HondaLaura Cuj Trigueros100% (1)
- Soldadura Por OxigenoDocument3 pagesSoldadura Por OxigenoArmando TorricoPas encore d'évaluation
- Presupuesto de compras en empresas: materia prima e industrialDocument14 pagesPresupuesto de compras en empresas: materia prima e industrialRenato Mam80% (5)
- Resolución General ERSeP #05 2016Document7 pagesResolución General ERSeP #05 2016Cristian A. TisseraPas encore d'évaluation
- Arbol de Problemas en Base A La Matriz Marco Lógico Covid-19Document4 pagesArbol de Problemas en Base A La Matriz Marco Lógico Covid-19Henry Tello Quinteros100% (1)
- Citizen At8011 55eDocument77 pagesCitizen At8011 55eAnonymous HGOomkn69Pas encore d'évaluation
- SST-F-41 Checklist TirforDocument1 pageSST-F-41 Checklist Tirforallisonvaldez67% (3)
- 2013 Rotabolt Brochure SpanishDocument12 pages2013 Rotabolt Brochure SpanishVictoria NúñezPas encore d'évaluation
- Dossier Final de Manejo AmbientalDocument18 pagesDossier Final de Manejo AmbientalJESUS MANUEL PRADA CABANAPas encore d'évaluation
- 2 Fresadora W150cfw150cfi 1220 v1 EsDocument40 pages2 Fresadora W150cfw150cfi 1220 v1 EsHugo EstigarribiaPas encore d'évaluation
- Logistica de EntradaDocument10 pagesLogistica de EntradaLina Pino BetancurPas encore d'évaluation
- Tesis MaestriaDocument136 pagesTesis MaestriaMARIO SILVAPas encore d'évaluation
- Paso 3 - Reconocer Los Tipos de Sistemas y Procesos TecnológicosDocument13 pagesPaso 3 - Reconocer Los Tipos de Sistemas y Procesos TecnológicosHarvey VeraPas encore d'évaluation
- Ingeniería de Procesos Industriales - Pensum de EstudiosDocument3 pagesIngeniería de Procesos Industriales - Pensum de Estudioscodes luisPas encore d'évaluation
- Memoria2018 PDFDocument142 pagesMemoria2018 PDFSergio omar viscarra ricaldi50% (2)
- Tubos y accesorios PVC para instalaciones eléctricasDocument5 pagesTubos y accesorios PVC para instalaciones eléctricasCarlosTamayoCamposPas encore d'évaluation
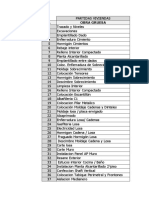
- Partidas Vivienda TipoDocument3 pagesPartidas Vivienda TipoNachoRetamal25% (4)
- Informe Practica Laboral Técnico Universitario en Mantenimiento IndustrialDocument30 pagesInforme Practica Laboral Técnico Universitario en Mantenimiento IndustrialClaudio BurgosPas encore d'évaluation
- OFICIALES OdtDocument29 pagesOFICIALES OdtWillMan FernandezPas encore d'évaluation
- Grupo N°6 - Proyecto Final Diseño de PlantasDocument197 pagesGrupo N°6 - Proyecto Final Diseño de PlantasMEDALY MASHIELL DIAZ POMAPas encore d'évaluation
- Curso Ofimatica EmpresarialDocument17 pagesCurso Ofimatica Empresarialteofilo percy rojas lucanaPas encore d'évaluation
- 0 Modelos HCMDocument8 pages0 Modelos HCMDarwin Mauricio Garay FonsecaPas encore d'évaluation
- 2AIIND InvestigacionDocumentaLDocument21 pages2AIIND InvestigacionDocumentaLEdrei HaasPas encore d'évaluation
- MolinoDocument27 pagesMolinoCaren_Pagani_397Pas encore d'évaluation
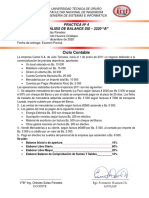
- Practica N°4 Analisis de BalanceDocument1 pagePractica N°4 Analisis de BalanceMadelaine Caro CocaPas encore d'évaluation
- Tolerancias OringDocument3 pagesTolerancias OringJuanFran RamirezPas encore d'évaluation
- Taller Transporte SimplexDocument14 pagesTaller Transporte SimplexFundacion SirePas encore d'évaluation
- Diseñando una planta de enlatadosDocument10 pagesDiseñando una planta de enlatadosTony Gzz FloresPas encore d'évaluation
- CV Carlos MontoyaDocument3 pagesCV Carlos MontoyaJose ManuelPas encore d'évaluation