Académique Documents
Professionnel Documents
Culture Documents
Sistemas de Equações Lineares
Transféré par
Bruno GindriTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Sistemas de Equações Lineares
Transféré par
Bruno GindriDroits d'auteur :
Formats disponibles
UNIVERSIDADE DO ALGARVE ESCOLA SUPERIOR DE TECNOLOGIA
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
APONTAMENTOS DE
LGEBRA LINEAR E GEOMETRIA ANALTICA
(III. Sistemas de equaes lineares)
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
ndice
3. Sistemas de equaes lineares .......................................................................................1
3.1 Introduo .......................................................................................................................1
3.2 Aplicao do clculo matricial aos sistemas de equaes lineares ....................................6
3.2.1 Mtodo de Gauss ..........................................................................................................8
3.2.2 Mtodo da matriz inversa............................................................................................ 10
3.2.3 Regra de Cramer......................................................................................................... 10
3.2.4 Mtodo dos determinantes .......................................................................................... 17
3.2.5 Sistemas homogneos................................................................................................. 20
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
1/ 26
3. Sistemas de equaes lineares
3.1 Introduo
Os sistemas de equaes lineares e suas solues constituem um dos maiores tpicos em lgebra
linear. Vamos introduzir alguma terminologia bsica e discutir mtodos para classificar e resolver
sistemas de equaes lineares de nmeros reais e ver como a lgebra matricial pode simplificar o
seu estudo.
Comecemos por relembrar o conceito de equao linear. Como sabido, qualquer recta no plano
xoy pode ser representada analiticamente por uma equao da forma
1 2
a x a y b + = , onde
1
a ,
2
a e
b e
1
a ,
2
a so no simultaneamente nulos. Uma equao nesta forma chamada uma equao
linear nas variveis x e y. Mais genericamente, pode definir-se uma equao linear com n variveis.
Definio1 (Equao linear): Uma equao linear (ou do primeiro grau) nas n variveis
1 2
, ,...,
n
x x x (as incgnitas) uma equao que pode ser escrita na forma
1 1 2 2 n n
a x a x a x b + + + = ,
onde os coeficientes
1 2
, ,...,
n
a a a e o termo independente b so nmeros reais, e
1 2
, ,...,
n
a a a no
todos simultaneamente nulos.
Repare-se que uma equao linear no envolve, por exemplo, produtos ou razes de variveis.
Todas as variveis aparecerem elevadas a 1, e no aparecem com argumentos para funes
trigonomtricas, logartmicas ou exponenciais.
Resolver a equao linear encontrar uma sequncia de n nmeros
1 2
, ,...,
n
s s s de maneira a que a
equao satisfeita quando se substitui
1 1
x s = ,
2 2
,...,
n n
x s x s = = . A essa sequncia d-se o nome
de soluo da equao linear. O conjunto de todas as solues chamado o conjunto soluo ou a
soluo geral da equao. Equaes dizem-se equivalentes quando tema mesma soluo..
Obs.1: vulgar representar, uma soluo da equao linear por
1 2
( , ,..., )
n
s s s ou
1 2
[ ... ]
T
n
s s s
cujos elementos satisfazem a equao quando se substitui
1 1
x s = ,
2 2
,...,
n n
x s x s = = .
Exerccio1: Encontre as solues das equaes a) 4 2 1 x y = e b)
1 2 3
4 7 5 x x x + = .
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
2/ 26
Definio2 (Sistema de equaes lineares): Um conjunto finito de equaes lineares nas variveis
1 2
, ,...,
n
x x x chamado um sistema de equaes lineares (sistema linear) e pode ser representado por
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
n n
n n
m m mn n m
a x a x a x b
a x a x a x b
a x a x a x b
+ + + =
+ + + =
+ + + =
,
em que
ij
a (no todos nulos) e
k
b so constantes reais, para, , 1,..., i k m = e 1,..., j n = .
Obs.2: Repare-se que o sistema tem m equaes e n variveis. E que, as m equaes lineares do
sistema envolvem, cada uma, as mesmas variveis.
Os ndices nas constantes as so utilizados para indicar a localizao do coeficiente no sistema. O
primeiro nmero do ndice do coeficiente
ij
a indica qual a equao onde o coeficiente ocorre, o
segundo nmero indica qual a incgnita que multiplica. Assim,
12
a pertence primeira equao e
multiplica a incgnita
2
x .
Uma sequncia de nmeros
1 2
, ,...,
n
s s s chamada a soluo do sistema se
1 1
x s = ,
2 2
,...,
n n
x s x s = = uma soluo de cada uma das equaes do sistema (verificam todas as
equaes simultaneamente). O conjunto soluo de um sistema de equaes lineares o conjunto de
todas as solues do sistema. Vamos referir o processo de encontrar o conjunto soluo de um
sistema de equaes lineares como resolver o sistema.
Obs.3: Uma soluo de um sistema de equaes lineares,
1 2
( , ,..., )
n
s s s ou
1 2
[ ... ]
T
n
s s s ,
simultaneamente soluo de cada uma das equaes do sistema. Assim como no caso das equaes,
os sistemas lineares so chamados equivalentes quando tm o mesmo conjunto soluo.
Recordamos as possibilidades que ocorrem quando se resolve um sistema de equaes lineares, o
que pode ser interpretado como classificar o sistema. Consideremos, para isso, o seguinte
sistema linear com duas equaes e duas incgnitas x e y ,
1 1 1 1 1
2 2 2 2 2
( , no simultaneamente nulos)
( , no simultaneamente nulos)
a x b y c a b
a x b y c a b
+ =
+ =
.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
3/ 26
Como sabemos, os grficos destas duas equaes so rectas (porqu?), por exemplo,
1
r e
2
r . Uma
vez que o ponto ( , ) x y pertence a uma recta se os nmeros x e y satisfazem a equao da recta, a
soluo do sistema de equaes corresponde a pontos de interseco entre
1
r e
2
r . Um sistema de
equaes lineares pode ser classificado da seguinte maneira:
As rectas
1
r e
2
r podem ser paralelas, e, no havendo interseco entre elas, o sistema no
tem soluo ( impossvel);
As rectas
1
r e
2
r podem ter um nico ponto de interseco, o sistema tem uma soluo (
possvel e determinado);
As rectas
1
r e
2
r podem coincidir, tm infinitos pontos de interseco, o sistema tem
infinitas solues ( possvel e indeterminado).
A soluo do sistema obtida atravs de mtodos de resoluo, a sua classificao tem a ver com o
facto dessa soluo existir ou no. Portanto, ao resolvermos um sistema estamos a classific-lo,
contudo, podemos classific-lo sem o resolver.
Vamos ilustrar o que aqui foi dito com um exemplo que visa, principalmente, recordar o processo
de resoluo/classificao de sistemas de equaes lineares com duas variveis e duas equaes.
Exemplo1: Resolva e classifique os seguintes sistemas de equaes lineares
a)
4
2 1
x y
x y
+ =
+ =
. b)
4
2 2 8
x y
x y
+ =
+ =
. c)
4
2 2 6
x y
x y
+ =
+ =
.
Resoluo: Resolver um sistema significa encontrar os nmeros que satisfazem simultaneamente as
suas equaes. Uma estratgia de resoluo , utilizando operaes nas equaes, transformar o
sistema de equaes lineares dado num sistema equivalente de tratamento mais fcil.
a) Multiplicando a 2 equao por ( 1 ) e somando 1, resulta
4 4 1
2 1
2 1 3
3 0 3 1 3
x y x y x
x y
x y y
x x y
+ = + = =
=
+ = =
+ = = =
.
A soluo do sistema o ponto (vector) (1, 3) , quando classificao, uma vez que o sistema tem
uma nica soluo, diz-se possvel e determinado.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
4/ 26
b) Repare-se que a 2 equao deste sistema o dobro da primeira, por isso, dividindo-a por 2, o
sistema fica reduzido equao, 4 y x = . Assim, as solues do sistema so as solues desta
equao, ou seja, os pontos da recta 4 y x = , tendo infinitas solues, o sistema possvel e
indeterminado. Analiticamente podemos fazer
4 4 4 4
2 2 8 2 2(4 ) 8 0 0 (PV)
x y y x y x y x
x y x x x
+ = = = =
+ = + = =
,
concluindo-se que, a resoluo deste sistema de duas equaes, reduz-se resoluo de uma
equao com duas incgnitas, 4 y x = , ou seja, tem infinitas solues.
Obs.4:
4
4 0 0 {...( 1, 5), (0, 4}, (1, 3)...} {...( 1, 5), (0, 4}, (1, 3)...},
0 0 (PV)
y x
y x
=
= = =
as solues da equao 4 y x = (representveis na forma paramtrica por ( , 4 ) t t , ondet o
parmetro). A conjuno de condies corresponde interseco dos seus conjuntos soluo.
c) Dividindo por 2 a 2 equao do sistema, resulta
4
3
x y
x y
+ =
+ =
, e, uma vez que a soma de dois
nmeros x e y no pode ser, simultaneamente, 4 e 3, o sistema no tem soluo, diz-se impossvel.
Analiticamente a resoluo pode ser
4 4 4
2 2 6 2 2(4 ) 6 8 6 Proposio Falsa (PF)
x y y x y x
x y x x
+ = = =
+ = + = =
.
Como chegmos absurda concluso que 8 6 = , conclui-se que o sistema no tem soluo.
Obs.5:
4
4 8 6 {...( 1, 5), (0, 4}, (1, 3)...}
8 6 (PF)
y x
y x
=
= = =
(o conjunto vazio).
At aqui resolvemos e, consequentemente, classificmos o sistema atravs de mtodos analticos.
Vamos agora utilizar o mtodo grfico. Como sabemos, cada uma das duas equaes dos sistemas
representam uma recta, por isso, a soluo de cada sistema est relacionada com o posicionamento
no plano dessas duas rectas (a soluo do sistema dada pela interseco das duas rectas).
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
5/ 26
A representao grfica das equaes dos diferentes sistemas do exemplo1 ilustrada a seguir.
Como se pode verificar, os cenrios resultantes da representao grfica, das rectas envolvidas em
cada sistema, esto de acordo com a resoluo analtica desses sistemas:
As rectas do sistema a) tem um nico ponto de interseco. As rectas so concorrentes e o
sistema possvel e determinado (tem uma nica soluo);
As rectas do sistema b) tem infinitos pontos em comum. As rectas so coincidentes e o
sistema diz-se possvel e determinado (tem infinitas solues);
As rectas do sistema c) no tem pontos de interseco. As rectas so paralelas e o sistema
impossvel (no tem soluo).
Apesar de se ter apenas considerado sistemas com duas equaes e duas incgnitas, os trs sistemas
do exemplo1 ilustram as nicas trs possibilidades que se verificam na classificao de qualquer
sistema de equaes lineares com coeficientes reais.
Generalizando: Um sistema de m equaes lineares com coeficientes reais pode ser:
Possvel e determinado (tem uma nica soluo), SPD;
Possvel e indeterminado (tem infinitas solues), SPI;
Impossvel (no tem soluo), SI.
Obs.6: Nos sistemas possveis as m equaes so compatveis, estes sistemas dizem-se compatveis
ou consistentes. Se p m < das equaes do sistema tm uma soluo comum, ento qualquer das
outras equaes que seja satisfeita por essa mesma soluo diz-se compatvel com as p equaes.
Nos sistemas impossveis as equaes so incompatveis, por isso, os sistemas dizem-se
incompatveis ou inconsistentes.
a) rectas
concorrentes
b) rectas
coincidentes
c) rectas
paralelas
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
6/ 26
3.2 Aplicao do clculo matricial aos sistemas de equaes lineares
Considere-se o seguinte sistema de equaes lineares com m equaes e n incgnitas,
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
n n
n n
m m mn n m
a x a x a x b
a x a x a x b
a x a x a x b
+ + + =
+ + + =
+ + + =
.
Como sabemos, um mtodo bsico de resoluo de sistemas de equaes lineares por eliminao
sistemtica das suas incgnitas, ou seja, transforma-se o sistema original num sistema equivalente
de mais fcil resoluo. Para isso so utilizadas, por exemplo, as seguintes operaes:
1. Multiplicao de uma equao por uma constante diferentes de zero;
2. Troca de duas equaes;
3. Adicionar duas equaes.
Pretendemos aplicar o clculo matricial ao estudo (classificao e resoluo) de sistemas de
equaes lineares. O sistema apresentado em cima, pode ser representado na forma matricial
AX B = , onde
11 12 1
21 22 2
1 2
( )
n
n
m m mn
m n
a a a
a a a
A
a a a
(
(
(
=
(
(
,
1
2
( 1)
n
n
x
x
X
x
(
(
(
=
(
(
e
1
2
( 1)
m
m
b
b
B
b
(
(
(
=
(
(
,
( ) m n
A
a matriz dos coeficientes do sistema, onde m o n de linhas/equaes e, n o n de
colunas/variveis (repare-se que, a coluna j corresponde varivel
j
x );
( 1) n
X
matriz coluna das incgnitas (a calcular);
( 1) m
B
a matriz coluna dos termos independentes (valores conhecidos).
Para efectuar o estudo do sistema de equaes lineares, podemos representar o sistema linear pela a
matriz ampliada [ | ] A B (matriz completa do sistema) associada que se obtm acrescentando a
coluna dos termos independentes B matriz do sistema A, ou seja,
1 11 12 1
21 22 2 2
1 2
( ( 1))
...
...
[ | ]
... ... ... ...
...
n
n
m m mn m
m n
b a a a
a a a b
A B
a a a b
+
(
(
(
=
(
(
.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
7/ 26
A ideia operar na matriz ampliada [ | ] A B por forma a obter uma matriz que esteja associada a um
sistema linear equivalente ao original, ou seja, obter uma matriz [ | ] C D equivalente a [ | ] A B .
Como as linhas de [ | ] A B correspondem s equaes do sistema, as trs operaes utilizadas para a
resoluo de sistemas, correspondem s operaes elementares por linhas das matrizes. Assim,
para se obter um sistema equivalente ao original, utilizam-se as operaes elementares das matrizes,
aplicadas s linhas, para condensar [ | ] A B , visando, no final da condensao, obter uma matriz
equivalente [ | ] C D , em que C a condensada da matriz A, da forma,
11 12 1 1
22 2 2
( ( 1))
...
0 ...
[ | ]
0 0 ...
n
n
mn m
m n
c c c d
c c d
C D
c d
+
(
(
(
=
(
(
(
.
Obs.7: Esta condensao pode ser efectuada por colunas, no esquecendo que as colunas
representam as incgnitas, e que no se pode trocar a coluna associada matriz B.
Neste termos, o sistema associado nova matriz [ | ] C D equivalente ao sistema inicial, portanto,
estudar o sistema associado a [ | ] A B o mesmo que estudar o sistema associado a [ | ] C D .
Comecemos por classificar o sistema tendo por base a matriz [ | ] C D . Para isso, calculam-se a
caracterstica da matriz do sistema, A, indicada pela matriz C, e a caracterstica da matriz ampliada
[ | ] A B , indicada por [ | ] C D (uma vez que estas matrizes so equivalentes). Designando por:
r a caracterstica da matriz A, ( ) r r A = ;
r a caracterstica da matriz [ | ] A B , ( | ) r r A B = ;
m o nmero de equaes, que corresponde ao nmero de linhas em A;
n o nmero de incgnitas, que corresponde ao nmero de colunas em A.
Tendo em conta os valores de r , r , m e de n podemos ter vrios tipos de sistemas:
Como m n = a matriz A e, consequentemente, a matriz C so quadradas , e, como ( ) r A n = (existe
1
A
), a matriz pode ser transformada numa matriz triangular. Assim, a matriz [ | ] C D , obtida por
condensao de [ | ] A B , do tipo
11 12 1 1
22 2 2
( ( 1))
...
0 ...
[ | ]
0 0 ...
n
n
nn n
n n
c c c d
c c d
C D
c d
+
(
(
(
=
(
(
(
, uma vez que r n = ( det( ) 0 C e 0, 1,...,
ii
c i n = ).
1) r m n = =
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
8/ 26
Obs.8: A matriz obtida por condensao no nica, contudo, ( | ) ( | ) ( ) ( ) r C D r A B r A r C = = = .
O sistema associado matriz [ | ] C D
11 1 12 2 1 1
22 2 2 2
0
...............................................
0 0
n n
n n
nn n n
c x c x c x d
c x c x d
c x d
+ + + =
+ + + =
+ + + =
com todos os 0
ii
c . Ou seja, nestas condies temos um sistema possvel e determinado (repare-
se que a ltima equao do sistema possvel e determinada).
Apresentam-se de seguida alguns mtodos de resoluo de sistemas de equaes lineares possveis
e determinados.
1. Mtodo de eliminao de Gauss ou de substituio regressiva
Quando se condensa a matriz ampliada do sistema de equaes lineares, criamos um sistema
equivalente que pode ser resolvido por substituio regressiva. Da ltima linha sai,
n
n
nn
d
x
c
= ,
substituindo este valor na penltima linha obtm-se
1 n
x
. O processo continua sucessivamente at
primeira linha, da qual sai
1
x , uma vez que nessa altura j so conhecidos os valores de
2 3
, ,...,
n
x x x .
O processo inteiro conhecido como mtodo de eliminao de Gauss.
2. Mtodo de eliminao de Gauss-Jordan
Uma modificao do mtodo de Gauss simplifica bastante a fase de substituio regressiva, e
particularmente til quando os clculos esto a ser feito mo. Essa variante, conhecida como o
mtodo de eliminao de Gauss-Jordan, baseia-se em reduzir ainda mais a matriz ampliada.
Partindo da matriz condensada [ | ] C D , podemos continuar a operar nesta matriz e transform-la em
1
2
1 0 ... 0
0 1 ... 0
[ | ]
... ... ... ...
0 0 ... 1
n
l
l
I L
l
(
(
(
=
(
(
.
Para tal, basta dividir cada linha de matriz [ | ] C D por
ii
c e condensar a matriz para cima da
diagonal principal. Assim, os valores da matriz L coincidem com os valores das incgnitas X, ou
seja:
1 1 2 2
, ,...,
n n
x l x l x l = = = .
Obs.9: Obviamente o processo pode comear com a matriz [ | ] A B .
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
9/ 26
Resumindo, estes dois mtodos consistem nos seguintes passos:
(a) Escrever a matriz ampliada do sistema;
(b) Atravs das operaes elementares, condensar a matriz ampliada;
(c) Resolver o sistema equivalente que corresponde matriz condensada;
ou, em alternativa,
(d) Atravs das operaes elementares, transformar A numa matriz identidade.
Obs.10: Estes dois mtodos vem no seguimento da condensao de [ | ] A B .
Exemplo2: Classifique e resolva o sistema
1 3
1 2 3
1 2 3
2 6
3 4 6 30
2 3 8
x x
x x x
x x x
+ =
+ + =
+ =
.
Resoluo: Comecemos pela classificao, a matriz dos coeficientes
1 0 2
3 4 6
1 2 3
A
(
(
=
(
(
, como a
matriz A quadrada ( 3 3 ) e det( ) 44 0 A = , podemos transform-la numa matriz triangular, e
assim, o sistema associado possvel e determinado. O que pode ser confirmado atravs da
condensao por linhas da matriz ampliada
1 0 2 6 1 0 2 6 1 0 2 6 1 0 2 6
[ | ] 3 4 6 30 0 4 12 48 0 2 5 14 0 2 5 14 [ | ]
1 2 3 8 0 2 5 14 0 4 12 48 0 0 22 76
A B C D
( ( ( (
( ( ( (
= =
( ( ( (
( ( ( (
repare-se ( ) ( | ) r r A r A B m n = = = = . Destas matrizes equivalentes, resultam os seguintes sistemas
equivalentes, cuja soluo obtida pelo mtodo de Gauss,
10
1 3 1 3 1 11
18
1 2 3 2 3 2 11
76 38
1 2 3 3 3 22 11
2 6 2 6
3 4 6 30 2 5 14
2 3 8 22 76
x x x x x
x x x x x x
x x x x x
+ = + = =
+ + = + = =
+ = = = =
.
Ou, como alternativa, podemos utilizar o mtodo de Gauss-Jordan,
10 10
11 11
36 18
22 11
38 38
76 11 11
22
1 0 2 6
1 0 2 6 1 0 0 1 0 0
5
[ | ] 0 2 5 14 0 1 7 0 1 0 0 1 0 [ | ]
2
0 0 22 76 0 0 1 0 0 1
0 0 1
C D I L
(
( ( (
(
( ( (
(
= =
( ( (
(
( ( (
(
donde,
10 18
1 2 11 11
, x x = = e
38
3 11
x = a soluo do sistema.
Repare-se que, classificao do sistema pelo processo de condensao da matriz ampliada, est
automaticamente associado o mtodo de resoluo de Gauss-Jordan.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
10/ 26
3. Mtodo da matriz inversa ou mtodo de explicitao
Tendo por base o facto do sistema ser possvel e determinado, pois s assim a matriz dos
coeficientes admite inversa,
1
A
, uma vez que, ( ) det( ) 0 r A n A = . Este mtodo consiste em
resolver a equao matricial AX B = em ordem matriz X,
B A AX A B AX
1 1
= = B A IX
1
= B A X
1
= .
No necessrio condensar a matriz, se assim fosse poderia utilizar-se o mtodo de Gauss.
Exemplo3: Resolva os seguintes sistemas: a)
2 1
3 2 3
x y
x y
+ =
. b)
2 2
3 2 1
x y
x y
+ =
. c)
2 4
3 2 5
x y
x y
+ =
.
Resoluo: Neste exemplo, propomo-nos resolver trs sistemas com matriz dos coeficientes igual.
Vamos usar o mtodo da matriz inversa, para isso, convm verificar se a sua aplicao possvel.
A matriz dos coeficientes
2 1
3 2
A
(
=
(
, uma matriz quadrada de ordem 2, onde
det( ) 1 ( ) 2 A r A n = = = , portanto, A admite inversa e o sistema possvel e determinado.
Temos que resolver a equao
1
X A B
= , sendo
1
2 1
3 2
A
(
=
(
vem
a)
2 1 1 5
3 2 3 9
X
( ( (
= =
( ( (
, b)
2 1 2 3
3 2 1 4
X
( ( (
= =
( ( (
e c)
2 1 4 3
3 2 5 2
X
( ( (
= =
( ( (
.
4. Regra de Cramer
A regra de Cramer, d uma frmula que descreve a soluo de sistemas de n equaes lineares com
n variveis possveis e determinados, inteiramente em termos de determinantes.
Teorema1 (Regra de Cramer): Se AX B = um sistema de n equaes lineares a n incgnitas tal
que | | 0 A , ento o sistema tem soluo nica. Essa soluo
| |
| |
i
i
A
x
A
= , 1,..., i n = , onde
i
A a
matriz que se obtm de A, substituindo a coluna i pela coluna dos termos independentes B.
Obs.11: Um sistema de equaes lineares diz-se de Cramer se, e s se:
i) O nmero de equaes igual ao nmero de incgnitas ( ) m n = ;
ii) A matriz dos coeficientes tem determinante | | 0 A .
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
11/ 26
Como se pode verificar, para um nmero n qualquer de equaes, a regra de Cramer envolve o
clculo de 1 n + determinantes de ordem n, o que para 4 n > pode ser tedioso para ser feito mo.
Mesmo tendo, este resultado, pouco valor prtico para alm de sistemas com duas equaes e duas
variveis, tem uma grande importncia terica. Esta regra til para se estudar propriedades
matemticas da soluo sem ser necessrio resolver o sistema. uma alternativa condensao da
matriz [ | ] A B para se classificar sistemas.
Com base no valor do determinante de
( ) n n
A
, vamos clarificar o processo de classificao de
sistemas, com n equaes e n incgnitas, atravs da regra de Cramer:
Caso | | 0 A , do teorema anterior resulta imediatamente que, podemos sempre encontrar uma
soluo que nica, o sistema possvel e determinado.
Exemplo4: Resolva o sistema
1 3
1 2 3
1 2 3
2 6
3 4 6 30
2 3 8
x x
x x x
x x x
+ =
+ + =
+ =
.
Resoluo: A matriz dos coeficientes
1 0 2
3 4 6
1 2 3
A
(
(
=
(
(
e a dos termos independentes
6
30
8
B
(
(
=
(
(
.
Como a matriz A quadrada ( 3 3 ) e | | 44 0 A = , o sistema diz-se de Cramer, logo, possvel e
determinado. Sendo
1 1
6 0 2
30 4 6 | | 40
8 2 3
A A
(
(
= =
(
(
,
2 2
1 6 2
3 30 6 | | 72
1 8 3
A A
(
(
= =
(
(
e
3 3
1 0 6
3 4 30 | | 152
1 2 8
A A
(
(
= =
(
(
,
vem
1
1
| | 40 10
| | 44 11
A
x
A
= = = ,
2
2
| | 72 18
| | 44 11
A
x
A
= = = e
3
3
| | 152 38
| | 44 11
A
x
A
= = = .
Ou, pelo que foi dito, o sistema AX B = , com
( ) n n
A
, tem soluo nica sse | | 0 A , sendo esta
soluo dada por
1
AX B X A B
= = (verifique!).
Caso | | 0 A = , como o determinante da matriz dos coeficientes aparece no denominador, a
diviso por zero no possvel. No entanto, temos que considerar dois casos:
i) Se tivermos
0
0
i
x = , 1,..., i n = (todos os numeradores iguais a zero), ou seja, uma
indeterminao para todas as incgnitas, o sistema possvel e indeterminado ou impossvel
(ver teorema de Rouch).
ii) Se pelo menos um dos numeradores for diferente de zero, o sistema impossvel
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
12/ 26
Exemplo5: Classifique o sistema
2 3 1
3 6 9 3
2 4 6 2
x y z
x y z
x y z
+ =
+ =
+ =
.
Resoluo: Para classificar o sistema, vamos utilizar a regra de Cramer. Comecemos por ver que,
| | 0 A = , ou seja, o sistema no pode ser possvel e determinando. Por outro lado, como,
1 2 3
| | | | | | 0 A A A = = = , temos
0
0
i
x = , 1, 2, 3 i = , uma indeterminao para todas as variveis. Como
a ltima equao combinao linear das outras duas, o sistema possvel e indeterminado. Repare
que ( ) ( | ) 1 r A r A B = = (verifique!). Por outro lado, trocando a ltima equao por
2 3 2 0 x y z + + = , tambm
1 2 3
| | | | | | 0 A A A = = = e | | 0 A = . Contudo, o sistema impossvel basta
atender s duas ltimas equaes (porqu?). Repare que ( ) 1 ( | ) 2 r A r A B = < = (verifique!).
No que se segue, d-se uma sugesto de orientao na utilizao de mtodos de resoluo de
sistemas de n equaes lineares com n variveis, possveis e determinados:
a) conveniente usar o mtodo de Gauss para resolver sistemas de n equaes lineares com n
variveis nos seguintes casos:
Quando se tem para resolver um nico sistema;
Quando se quer resolver um conjunto de sistemas nestas condies, tais que as matrizes dos
coeficientes das variveis de cada sistema sejam diferentes umas das outras;
Este mtodo indicado quando o nmero n de equaes for relativamente grande.
b) conveniente usar o mtodo da matriz inversa no caso em que se tem para resolver conjuntos de
sistemas de n equaes lineares e n variveis, tais que as matrizes dos coeficientes das variveis de
cada sistema sejam todas iguais, variando somente a matriz dos termos independentes.
c) A regra de Cramer, de uso restrito como j foi referido, utilizada, em geral, apenas para resolver
sistemas de 2 equaes lineares e duas variveis ou, mesmo, de 3 equaes e 3 variveis. Para
sistemas com mais de 3 equaes lineares a regra praticamente inaplicvel em virtude do elevado
nmero de determinantes a calcular.
Por exemplo, para resolver sistemas de n equaes a n incgnitas pela regra de Cramer, preciso
avaliar 1 n + determinantes de matrizes ( n n ). Enquanto pelo mtodo de Gauss basta condensar
uma matriz ( ( 1) n n + ). Contudo, a regra de Cramer d uma frmula para a soluo deste, desde
que o determinante da matriz do sistema seja diferente de zero. E, independentemente de termos de
calcular 1 n + determinantes, uma alternativa para a classificao de sistemas.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
13/ 26
Como m n < , o nmero de equaes menor que o nmero de incgnitas, ou seja, a matriz
( ) m n
A
tem mais colunas do que linhas (a matriz no quadrada, no possvel transformar A em
triangular). Como as linhas de A so linearmente independentes (porqu?) e ( ) r A n < , aps
condensao da matriz ampliada do sistema, [ | ] A B , obtemos uma matriz [ | ] C D do tipo
11 12 1 1 1
22 2 2 2
0
[ | ]
0 0
m n
m n
mm mn m
c c c c d
c c c d
C D
c c d
(
(
(
=
(
(
.
Observa-se que, ( ) ( | ) r A r A B m = = (nmero de colunas linearmente independentes), e que a
ltima linha da matriz C tem mais do que um elemento diferente de zero (para um nico elemento
nestas condies o sistema seria possvel e determinado). A matriz [ | ] C D corresponde ao sistema
11 1 12 2 1 1 1
22 2 2 2 2
0
...................................................................
0 0
m m n n
m m n n
mm m nn n m
c x c x c x c x d
c x c x c x d
c x c x d
+ + + + + =
+ + + + + =
+ + + + + =
,
como se pode verificar, a ltima equao indeterminada pois contm 1 1 n m n r =
incgnitas. Ou seja, existem n r incgnitas em excesso (arbitrrias), obtendo-se as restantes como
combinao linear destas, logo o sistema possvel e indeterminado. O grau de indeterminao
(n de incgnitas que excedem o n de equaes independentes) do sistema d n r n m = = .
Relativamente resoluo deste tipo de sistemas:
1) O mtodo de Gauss simplifica bastante a fase de substituio regressiva, e particularmente
til quando os clculos esto a ser feito mo num sistema com infinitas solues;
2) O mtodo de Gauss-Jordan, neste caso, no pode ser usado porque no se pode calcular I;
3) O mtodo da matriz inversa no pode ser aplicado uma vez que no existe
1
A
, ( ) r A n < ;
4) A regra de Cramer pode ser utilizada, porm sendo o sistema possvel e indeterminado,
m n < , necessrio acrescentar aos termos independentes mais d n m = variveis.
Qualquer que seja o mtodo utilizado, as primeiras m incgnitas;
1 2
, ,...
m
x x x (as principais, que
correspondem ao nmero de colunas linearmente independentes escolhidas), vm em funo das
ltimas n r incgnitas (arbitrrias/livres). Todas as equaes so principais (porqu?).
2) r m n = <
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
14/ 26
equaes r m
Exemplo6: Classifique e resolva o sistema
3 4 3 1
2 2 1
x y z
x y z
+ =
+ =
.
Resoluo: Como 2 3 m n = < = (existem mais variveis do que incgnitas) e ( ) ( | ) 2 r A r A B = =
(verifique!) o sistema possvel indeterminado, com grau de indeterminao 3 2 1 d n r = = =
(significa que existe uma varivel livre). Condensando a matriz ampliada do sistema obtemos
3
2
1 0 1 1 3 4 3 1
[ | ] [ | ]
0 1 1 1 2 2 1
A B C D
( (
= =
( (
.
O sistema original equivalente a
1
3
3 2
3 2
2
3
(2 1)
1 1 4 3 1
(varivel livre)
(1 ) 1 2 2 1
( 1)
x y
x z x z x y z
y
z y y z x y z
z y
=
= = + + =
= + = + =
= +
.
Neste caso, no podemos classificar o sistema pela regra de Cramer, pois no existe | | A (porqu?).
Para a sua resoluo usando esta regra, como sabemos que SPI, com grau de indeterminao 1,
considerarmos (por exemplo) y como varivel livre, donde as variveis x e z so as variveis
principais. Assim, temos que considerar a matriz do sistema com sendo
3 3 3 3
| | 3
1 2 1 2
A A
(
= = =
(
.
Nestes termos, a matriz dos termos independentes
1 4
1 2
y
B
y
+ (
=
(
, y . Obtemos
1 1
1 3
1 4 3
| |
| | 1 2 (2 1)
1 2 2 | |
y
A
A y x y
y A
+
= = = =
e
2 2
2 3
3 1 4
| |
| | 2 2 ( 1)
1 1 2 | |
y
A
A y z y
y A
+
= = = = +
.
Portanto,
1 2
3 3
{( (2 1), , ( 1)), } S y y y y = + a soluo do sistema.
Neste caso, a caracterstica da matriz A menor do que o nmero de equaes, portanto, aps
condensao da matriz ampliada [ | ] A B obtm-se uma matriz [ | ] C D do tipo
1 11 12 1 1
2 22 2 2
1
... ...
0 ... ...
... ... ... ... ... ... ...
[ | ] 0 0 ... ...
0 0 ... 0 ... 0
... ... ... ... ... ... ...
0 ... 0 0 ... 0
r n
r n
r rr rn
r
m
d c c c c
d c c c
C D d c c
d
d
+
(
(
(
(
(
=
(
(
(
(
(
.
A classificao do sistema depende dos valores dos ltimos termos independentes
1 2
, , ,
r r m
d d d
+ +
.
3. r m <
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
15/ 26
Podemos considerar duas situaes:
3 a) r r = , ou seja, as caractersticas da matriz A e da matriz [ | ] A B coincidem. Para que tal
acontea, necessrio que todos os ltimos m r termos independentes, correspondentes s
ltimas m r equaes, sejam nulos, ou seja, que 0
2 1
= = = =
+ + m r r
d d d .
Assim sendo, para a resoluo do sistema, podemos desprezar as ltimas m r equaes
(redundantes), uma vez que, so todas do tipo 0 0 = (condies universais). Eliminando estas
equaes, porque no so dependentes das restantes, o sistema na forma matricial, aps
condensao ser da forma
11 12 1 1 1
22 2 2 2
0
[ | ]
0 0
r n
r n
rr rn r
c c c c d
c c c d
C D
c c d
(
(
(
=
(
(
,
portanto, o sistema correspondente passa a ter n variveis e r equaes (as principais). Aps nova
condensao o sistema poder ser analisado pelos casos 1), se n r = ou 2), se n r > .
3 b) r r < , neste caso a caracterstica da matriz A menor que a caracterstica da matriz ampliada
[ | ] A B . Para que tal acontea, pelo menos um dos ltimos termos independentes;
1
,...,
r m
d d
+
tem
que ser diferente de zero, resultando numa equao do tipo: 0 k = (com 0 k ), pelo que o sistema
impossvel (o sistema tem mais termos independentes do que variveis).
Resumo: Tendo em conta os valores de m, n, ( ) r r A = e ( | ) r r A B = podemos ter:
1) SPD
2) SPI
1) SPD
3 )
2) SPI
3 ) SI
m r n
r m
m r n
r n
a r r
r n
r m
b r r
= =
=
= <
=
=
<
<
<
.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
16/ 26
Exemplo7: Classifique e resolva o sistema
2 2
2 2 0
3
3 3 11
4 4 2 8
x z t
x y t
x y z t
x y z t
x y z t
+ =
+ =
+ + =
+ =
+ + =
.
Resoluo: Como o sistema tem 4 n = incgnitas e 5 m = equaes, a matriz do sistema
1 0 2 1
2 1 0 2
1 1 1 1
3 1 3 1
4 1 4 2
A
(
(
(
( =
(
(
(
,
tem no mximo caracterstica ( ) 4 r A = (valor inferior ao nmero de equaes, ( ) r A m < ). Assim, o
sistema tem as trs possibilidades de classificao (justifique!). Prova-se que a caracterstica da
matriz ampliada igual caracterstica de A, ( ) ( | ) 4 r A r A B = = , ou seja, o sistema possvel,
como a caracterstica de A igual ao nmero de variveis, ( ) r A n = , o sistema determinando.
Condensando, por linhas, a matriz ampliada, vem
5 4 5 4
3 3 3 3
34 68 34 68
3 3 3 3
34 68
3 3
1 0 2 1 2 1 0 2 1 2 1 0 2 1 2
0 1 4 4 4 2 1 0 2 0 0 1 4 4 4
0 0 1 [ | ] [ | ], 1 1 1 1 3 0 0 1
0 0 0 3 1 3 1 11 0 0 0
0 0 0 4 1 4 2 8 0 0 0 0 0
A B C D
( ( (
( ( (
( ( (
( ( (
= =
( ( (
( ( (
( ( (
(o que acontece se trocarmos a ordem das linhas da matriz [ | ] A B , e das colunas?)
Donde a soluo do sistema
5 4
3 3
34 68
3 3
2 2 2 2
2
4 4 4 2 2 0
0
3
1
3 3 11
2
4 4 2 8
0 0
x z t x z t
x
y z t x y t
y
x y z t z t
z
x y z t
t
t
x y z t
+ = + =
=
+ + = + =
=
+ + = + =
=
+ =
=
=
+ + =
=
,
portanto, o sistema possvel e determinado com soluo {(2, 0, 1, 2)} S = . A ltima equao do
sistema, que corresponde linha de zeros de [ | ] C D redundante (porqu?) pode ser eliminada
para a resoluo do sistema (verifique!). O sistema tem ( ) 4 r A = equaes principais, as
necessrias para a sua resoluo. A equao redundante compatvel com o sistema que envolve as
outras 4 equaes (verifique!).
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
17/ 26
O processo de classificao de sistemas de equaes lineares pode ser baseado no clculo de
determinante. Este chamado mtodo dos determinantes.
Definio3: Dado um sistema de m equaes e n incgnitas, ao maior determinante em ordem
diferente de zero que se pode extrair da matriz do sistema, d-se o nome de determinante (menor)
principal do sistema, e representa-se por
p
, 1,..., p n = .
Relativamente ao determinante principal podemos dizer que:
As equaes cujos coeficientes esto representados no determinante principal (que
correspondem s p linhas de
p
), chamam-se equaes principais. As restantes equaes (se
houver) so equaes no principais;
As incgnitas cujos coeficientes esto representados no determinante principal (que
correspondem s i colunas de
p
), chamam-se incgnitas principais. As restantes incgnitas
(se houver) so incgnitas no principais (ou livres).
Exemplo8: Calcule o determinante principal do sistema do exemplo7.
Resoluo: A matriz dos coeficientes
(5 4)
A
, o maior determinante que se pode extrair de 4
ordem. O determinante que envolve as quatro primeiras equaes
4
34 0 = (verifique!), ou
seja, o determinante principal de ordem 4. Assim, as quatro equaes do sistema so as principais
e ltima no principal. Todas as incgnitas so principais (porqu?). Como vimos, o sistema
pode ser resolvido com as 4 primeiras equaes, a ltima equao redundante. Prova-se que
apenas o determinante
4
que no envolve a 1 equao igual zero (verifique!).
Exerccio2: Resolva os sistemas resultantes do sistema do exemplo7 depois de eliminar uma
equao. Compare os resultados com o respectivo determinante principal, que concluso pode tirar?
Exemplo9: Calcule o determinante principal do sistema
4
2 1
3 2 5
4 2 2 2 2
x y z t
x y z t
x t
x y z t
+ + + =
+ =
+ =
+ =
.
Resoluo: Como
(4 4)
A
, o maior determinante que se pode extrair de 4 ordem,
4
| | A = . Prova-
se que
4
0 = (porqu?), e que os determinante de 3 ordem, so todos nulos,
3
0 = .
Relativamente aos determinantes de 2 ordem, existe, por exemplo, um
2
1 1
3 0
2 1
= =
, logo
o determinante principal de 2 ordem.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
18/ 26
Nestes termos, consideram-se a 1 e 2 equaes e as incgnitas
1
x e
2
x como principais e as
restantes como no principais (porqu?). Repare-se que h outros determinantes de 2 ordem
diferentes de zero, e consequentemente, outras equaes e incgnitas principais.
Teorema2: Uma matriz tem caracterstica igual a r se, e s se, contm pelo menos um determinante
principal de ordem r .
Exemplo10: A matriz A do exemplo7 tem ( ) 4 r A = (porqu?), enquanto, para o exemplo9
( ) 2 r A = , porque
4
0 = ,
3
0 = e
2
0 .
Definio4: Chama-se determinante caracterstico, e representa-se por
c
, ao determinante que se
obtm do determinante principal acrescentando-lhe uma linha (constituda pelos coeficientes
correspondentes de uma equao no principal) e uma coluna (constituda pelos termos
independentes correspondentes).
Obs.12: H tantos determinantes caractersticos quantas as equaes no principais.
Exerccio3: Calcule os determinantes caractersticos do sistema do exemplo7.
Exemplo11: Determine os determinantes caractersticos do sistema do exemplo9.
Resoluo: Como vimos, o determinante principal de 2 ordem, uma vez que, por exemplo,
2
1 1
3 0
2 1
= =
. Nestes termos, consideramos a 1 e 2 equaes como principais e as
restantes duas como no principais, logo existem dois determinantes caractersticos,
3
1 1 4
2 1 1
3 0 5
c
= e
4
1 1 4
2 1 1
4 2 2
c
=
.
Existindo outros determinantes principais de 2 ordem, existem outros determinantes caractersticos
(quais?). Qual a caracterstica da matriz ampliada do sistema?
Teorema3 (teorema de Rouch): Um sistema de equaes lineares possvel se e s se no houver
determinantes caractersticos ou todos se anularem.
Nestas condies o sistema :
Possvel e determinado se todas as incgnitas so principais, ( ) ( | ) r A r A B n = = ;
Possvel e indeterminado se h incgnitas no principais, ( ) ( | ) r A r A B n = < ;
Impossvel se algum dos determinantes caractersticos diferente de zero, ( ) ( | ) r A r A B .
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
19/ 26
Este enunciado equivale ao seguinte: condio necessria e suficiente para que um sistema de
equaes lineares seja possvel que a matriz A dos coeficientes do sistema e a matriz ampliada
[ | ] A B tenham a mesma caracterstica.
Exerccio4: Faa um estudo comparativo entre a regra de Cramer e o teorema de Rouch.
Exerccio5: Classifique o sistema do exemplo7, utilizando o teorema de Rouch.
Exemplo12: Classifique o sistema do exemplo9, utilizando o teorema de Rouch.
Resoluo: Como
1 2
0
c c
= = o sistema possvel, sendo
2
0 e
(4 4)
A
existem incgnitas no
principais, logo o sistema indeterminando. Verifique que ( ) ( | ) r A r A B = .
Exemplo13: Sem resolver o sistema, verifique, usando o teorema de Rouch, que a equao
4 4 2 8 x y z t + + = compatvel com o sistema
2 2
2 2 0
3
3 3 11
x z t
x y t
x y z t
x y z t
+ =
+ =
+ + =
+ =
.
Resoluo: Uma equao compatvel com um sistema se verifica a soluo do sistema. Como o
sistema possvel (porqu?), pelo teorema de Rouch, ou no existem determinantes
caractersticos ou, se existem, so nulos. O determinante principal do sistema de ordem 4
(porqu?), com a equao dada formamos um determinante caracterstico
c
de ordem 5. Como
0
c
= (verifique!) a equao compatvel com o sistema (o que significa?). De facto, a soluo
do sistema {(2, 0, 1, 2)} S = , que satisfaz a equao dada (verifique!). Verifique se
2 2 x z t + = compatvel com o sistema que envolve as outras equaes e 4 4 2 8 x y z t + + = .
Exerccio6: Resolva os sistemas dos exemplos 9 e 13.
Exemplo14: Classifique o sistema, em funo do parmetro k ,
1 2 3
1 2 3
1 2 3
1 2 3
0
2 2
2 1
2 2
x x x
x x x
x x x
x x x k
+ + =
+ =
+ + =
+ + =
.
Resoluo: Pelo teorema de Rouch, a condio necessria e suficiente para que um sistema de
equaes lineares seja possvel que todos os determinantes caractersticos, se existirem, sejam
nulos. Uma vez que, a matriz do sistema de ordem ( 4 3 ), ou seja, existem 3 incgnitas e 4
equaes, o determinante principal no mximo tem ordem 3 (porqu?). Por exemplo,
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
20/ 26
3
1 1 1
1 1 2 3 0
2 1 1
= = ,
donde consideramos as trs primeiras equaes como principais (todas as incgnitas so principais,
porqu?). Como apenas a 4 equao no principal, existe um nico determinante caracterstico
4
1 1 1 0
1 1 2 2
3( 1)
2 1 1 1
2 1 2
c
k
k
= = , verifique para que valores de k , ( ) ( | ) r A r A B = .
Tendo em conta o valor de k a classificao do sistema :
4
1 0
c
k , o sistema impossvel, o determinante caracterstico diferente de zero;
4
1 0
c
k = = , o sistema possvel e determinado (porqu?).
Apesar dos sistemas de equaes lineares vistos at aqui serem sempre, possveis ou impossveis,
existe um tipo de sistemas lineares que nunca impossvel.
Definio5: Um sistema de equaes lineares diz-se homogneo se o seu termo independente em
cada equao igual a zero. Matricialmente representado por AX O = .
Por outras palavras, um sistema homogneo tem uma matriz ampliada da forma [ | 0] A . Pelo
teorema de Rouch, podemos concluir que, este sistema admite sempre a soluo trivial (porqu?),
isto ,
1 2
... 0
n
x x x = = = = (se existirem outras solues chamam-se no triviais).
Uma vez que os sistemas lineares homogneos tm sempre a soluo trivial, h apenas duas
possibilidades para as suas solues:
O sistema tem apenas a soluo trivial (nula), sistema possvel e determinado;
O sistema tem infinitas solues a juntar soluo trivial, sistema possvel e indeterminado.
Exemplo15: Resolva o sistema homogneo
1 2 3 5
1 2 3 4 5
1 2 3 5
3 4 5
2 2 0
2 3 0
2 0
0
x x x x
x x x x x
x x x x
x x x
+ + =
+ + =
+ =
+ + =
.
Resoluo: O sistema tem 4 equaes e 5 variveis ( m n < ). Tratando-se de um sistema
homogneo, tem sempre soluo (classifique o sistema utilizando o teorema de Rouch!). Aps
condensao, a matriz ampliada do sistema equivalente a
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
21/ 26
2 2 1 0 1 0 1 1 2 0 1 0 1 1 2 0 1 0
1 1 2 3 1 0 0 0 1 1 1 0 0 0 1 1 1 0
[ | ] [ | ].
1 1 2 0 1 0 0 0 0 1 0 0 0 0 0 1 0 0
0 0 1 1 1 0 0 0 0 1 0 0 0 0 0 0 0 0
A O C O
( ( (
( ( (
( ( (
= =
( ( (
( ( (
( ( (
Donde, ( ) 3 r A m n = < < , a ltima equao redundante (pode ser eliminada) e o sistema original
equivale a um sistema com 3 equaes (principais) e 5 variveis, portanto, possvel e indeterminado
de grau 2 (existem infinitas solues a juntar trivial). O sistema associado a [ | ] C O
1 2 3 5 1 2 3 5 1 2 5
1 2 3 4 5 3 5 3 5
1 2 3 5 4 4
2 2 0 2 0
2 3 0 0
2 0 0 0
x x x x x x x x x x x
x x x x x x x x x
x x x x x x
+ + = + = =
+ + = + = =
+ = = =
,
as variveis
1
x e
3
x so uma combinao linear das variveis
2
x e
5
x (as variveis livres).
Considerando
2
x s = e
5
x t = , a soluo geral
1 2 3 4
, , , 0 x s t x s x t x = = = = e
5
x t = .
Note-se que a soluo trivial obtida quando 0 s t = = . Determine uma soluo particular.
Este exemplo ilustra dois pontos importantes na resoluo de sistema de equaes lineares
homogneos:
1) As operaes elementares sobre as linhas da matriz ampliada [ | ] A O de um sistema homogneo,
no alteram a matriz dos termos independentes O, ou seja, depois da condensao a matriz
equivalente resultante do tipo[ | ] C O , e, assim, o sistema associado continua a ser homogneo;
2) Dependendo do facto da matriz condensada ter alguma linha de zeros ou no, o nmero de
equaes no sistema resultante ter o mesmo ou um menor nmero de equaes relativamente ao
sistema original. Nestes termos, se o sistema homogneo original tem m equaes e n variveis com
m n < , e se existirem r linhas no nulas na matriz condensada, ento ( ) r A r n = < (porqu?).
Teorema4: Seja 0 AX = um sistema homogneo com m equaes e n variveis, onde m n < , ento
o sistema tem infinitas solues.
Teorema5: O sistema homogneo 0 AX = tem solues no nulas se e s se ( ) r A r n = < (isto ,
se a caracterstica da matriz do sistema for inferior ao nmero de incgnitas).
Obs.13: Caso ( ) r A r n = < , uma vez que o sistema 0 AX = possvel, existem m r equaes
redundantes e n r incgnitas livres.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
22/ 26
Obs.14: Do teorema5 conclui-se que, o sistema homogneo 0 AX = , com n equaes e n
incgnitas, tem solues no nulas se e s se | | 0 A = , ou seja, se A for uma matriz singular.
Exemplo16: Considere a matriz
2 2 2
0 2 0
0 1 3
A
(
(
=
(
(
. Determine os valores tais que X O que
satisfazem a equao AX X = .
Resoluo: Sendo
(3 3)
A
, como a matriz identidade
3
I o elemento neutro do produto, temos
3 3 3 3 3
( ) 0 AX X AX I X AX I X I X I X A I X = = = = ,
um sistema homogneo (
(3 3)
A
), que tem soluo no trivial ( X O ) se, e s se,
3
| | 0 A I = .
Donde
2
3
2 2 2 1 0 0 2 2 2
| | 0 0 2 0 0 1 0 0 0 2 0 0 ( 2) ( 3) 0
0 1 3 0 0 1 0 1 3
A I
( (
( (
= = = =
( (
( (
ou seja, apenas para os valores 2 3 = = existe
0
0
0
x
X y
z
( (
( (
=
( (
( (
tal que AX X = .
Exemplo17 Resolva o sistema homogneo
1 2 3
1 2 3
1 2 3
0
3 2 0
2 0
x x x
x x x
x x x
+ + =
+ + =
+ =
.
Resoluo: Sistema com 3 m = equaes e 3 n = incgnitas, condensando a matriz do sistema
1 1 1 1 1 1
1 3 2 0 1 3
2 1 1 0 0 5
A
( (
( (
=
( (
( (
, vem
1 2 3 1
1 2 3 2
3 1 2 3
0 0
3 2 0 0
0 2 0
x x x x
x x x x
x x x x
+ + = =
+ + = =
= + =
.
O sistema possvel e determinado, apenas admite a soluo trivial. Repare-se que matriz do
sistema tem ( ) 3
p
r A m n = = = = , ou seja, | | 0 A (a matriz A regular). Existindo
1
A
, tem-se
AX O X O = = , a nica soluo do sistema homogneo.
Definio6: Um conjunto
1 2
{ , ,..., }
k
S S S de solues linearmente independentes do sistema
0 AX = um conjunto fundamental de solues se qualquer soluo do sistema uma combinao
linear das solues
1 2
, ,...,
k
S S S .
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
23/ 26
Teorema6: Seja 0 AX = , se ( ) r A r n = < o sistema possui conjuntos fundamentais de solues.
Obs.15: Para obter um conjunto fundamental de solues podem atribuir-se quaisquer valores s
incgnitas livres, desde que o determinante da matriz quadrada de ordem d, cujas colunas so
formadas pelos valores atribudos em cada soluo s incgnitas livres, seja diferente de zero.
Conclui-se que, o nmero de solues em qualquer conjunto fundamental igual ao grau de
indeterminao do sistema homogneo.
Exemplo18 Resolva o sistema homogneo
1 2 3 4
1 2 3 4
1 3 4
0
3 2 4 0
2 0
x x x x
x x x x
x x x
+ + + =
+ + + =
+ =
.
Resoluo: Um sistema de equaes homogneo com mais incgnitas, 4 n = , do que equaes,
3 m = , indeterminado. Como referido (onde?), para a resoluo do sistema, no necessrio usar
a matriz ampliada, basta condensar por linhas a matriz do sistema
1 1 1 1 1 1 1 1
[ | ] 1 3 2 4 0 2 1 3
2 0 1 1 0 0 0 0
A B
( (
( (
=
( (
( (
.
Conclui-se que ( ) 2 3 4 r A m n = < = < = , o sistema possvel e indeterminado de grau 2
(porqu?). Da maneira como a matriz foi condensada, a terceira equao redundante e as duas
primeiras so principais. Por outro lado, o maior determinante diferente de zero (determinante
principal) que se pode extrair de A de ordem 2 (porqu?), por exemplo,
2
1 1
2 0
1 3
= = , e
assim, considera-se as incgnitas
1
x e
2
x como principais, e
3
x e
4
x como livres (na soluo do
sistema as variveis
1
x e
2
x vm em funo de
3
x e
4
x ) .
Obs.16: Como ( ) 2 r A m n = < < existem determinantes caractersticos, estes so nulos (porqu?).
Assim,
1
1 3 4 2
1 2 3 4
1
1 2 3 4 1 2 3 4 2 3 4 2
1 2 3 4
1 2 3 4 2 3 4 3
1 3 4
4
( )
0
0 0 ( 3 )
3 2 4 0
3 2 4 0 2 3 0
2 0
x x x
x x x x
x x x x x x x x x x x
x x x x
x x x x x x x x
x x x
x
=
+ + + =
+ + + = + + + = = +
+ + + =
+ + + = + + =
+ =
A soluo geral do sistema toma a forma
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
24/ 26
1 1 1 1 1
3 4 3 4 2 2 2 2 2
1 1 3 3 1
3 4 3 4 2 2 2 2 2
3 4
3 3
4 4
( )
( 3 )
0 1 0
0 1 0
x x x x
x x x x
X x x
x x
x x
( ( ( ( (
( ( ( ( (
+
( ( ( ( (
= = + = +
( ( ( ( (
( ( ( ( (
( ( ( ( (
.
Fazendo
3 4
1, 0 x x = = e
3 4
0, 1 x x = = obtm-se um conjunto fundamental com 2 solues
(porqu?),
1 1
1 2 3 4 2 2
, , 1, 0 x x x x = = = = e
3 1
1 2 3 4 2 2
, , 0, 1 x x x x = = = = , e qualquer soluo do
sistema proposto combinao linear destas duas solues, ou seja,
1 1
1 2 2
3 1
2 2 2
1 2
3
4
1 0
0 1
x
x
X
x
x
( ( (
( ( (
( ( (
= = +
( ( (
( ( (
( ( (
(corresponde expresso geral das solues do sistema).
Se fizermos
3 4
1, 1 x x = = e
3 4
3, 1 x x = = obtm-se outro conjunto fundamental de solues,
1 2 3 4
0, 2, 1, 1 x x x x = = = = e
1 2 3 4
1, 3, 3, 1 x x x x = = = = , e qualquer soluo do sistema
proposto tambm combinao linear destas duas solues
1
2
1 2
3
4
0 1
2 3
1 3
1 1
x
x
X
x
x
( ( (
( ( (
( ( (
= = +
( ( (
( ( (
( ( (
.
Se fizermos
3 4
1 x x = = e
3 4
3 x x = = continuamos a obter duas solues do sistema 0 AX =
(verifique!), contudo, no constituem um conjunto fundamental de solues pois
2
1 3
0
1 3
= = .
Pelo que foi referido, todo o sistema de equaes lineares AX B = com 0 B , tem um sistema
homogneo associado. No que se segue, estabelecemos algumas relaes entre as solues de um
sistema e as solues do sistema homogneo associado.
Definio7: Chama-se ncleo, ( ) N A , de um sistema AX B = ao conjunto soluo do sistema
homogneo associado a esse sistema.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
25/ 26
Exemplo19 Calcule o ncleo do sistema
1
3 2 1
2 6 4 2
x y z
x y z
x y z
+ + =
+ + =
.
Resoluo: Pretende-se calcular a soluo do sistema homogneo associado a AX B = .
Condensando a matriz associada ao sistema, 0 AX = , obtemos
1 1 1 1 1 1
1 3 2 0 2 1
2 6 4 0 0 0
A
( (
( (
=
( (
( (
.
O sistema homogneo equivalente a
2
2
0 0
3 2 0 2 0
2 6 4 0
z
z
x x y z x y z
x y z y z y
x y z z z
= + + = + + =
+ + = + = =
=
.
Donde, a soluo geral do sistema 0 AX = , isto , o ncleo de AX B =
[ ]
{ }
1 1
2 2
( ) 1 ,
T
N A z z = .
Relao1: Considere-se um sistema de equaes AX B = e o sistema associado 0 AX = . Se
1
S e
2
S so solues de AX B = , ento
1
AS B = e
2
AS B = , donde,
1 2 1 2
( ) 0 AS AS A S S = = . A
diferena de duas solues do sistema no homogneo uma soluo do sistema homogneo.
Exemplo20 Resolva o sistema
1
3 2 1
2 6 4 2
x y z
x y z
x y z
+ + =
+ + =
.
Resoluo: O sistema possvel e indeterminando (porqu?), { 3, , 2 2} x y y z y = + = a
sua soluo. Duas solues particulares deste sistema so, para 1 y = , [ ]
1
4 1 4
T
S = e, para
0 y = , [ ]
2
3 0 2
T
S = , donde [ ]
1 2
1 1 2
T
S S = uma soluo particular do sistema
0 AX = (verifique!).
Relao2: Considere-se um sistema de equaes AX B = e o sistema associado 0 AX = . Seja S a
soluo de 0 AX = e
1
S uma soluo particular de AX B = , ento
1
( ) 0 A S S B B + = + = . As
solues do sistema AX B = (se existirem) podem ser obtidas somando uma soluo particular
deste sistema com cada soluo do sistema homogneo associado.
REA DEPARTAMENTAL DE ENGENHARIA CIVIL
Sistemas de equaes lineares
APONTAMENTOS DE LGEBRA LINEAR E GEOMETRIA ANALTICA
26/ 26
Exemplo21: Sabendo que [ ] 4 1 4
T
verifica o sistema do exemplo anterior, ache a expresso
geral das suas solues.
Resoluo: Vamos resolver o sistema AX B = utilizando o sistema homogneo 0 AX = , que tem
soluo [ ]
{ }
1 1
2 2
( ) 1 ,
T
N A z z = (porqu?). Considerando a soluo particular
[ ]
1
4 1 4
T
S = de AX B = e somando-a com algumas solues de 0 AX = , por exemplo,
[ ] [ ] [ ] 1 1 2 , 2 2 4 , 3 3 6
T T T
e [ ] 4 4 8
T
, obtemos a expresso geral das solues de
AX B = , ou seja, { 3, , 2 2} x y y z y = + = (verifique!).
Exemplo22 Considere o sistema de equaes lineares
2
5 2 2 1
3 2 0
x y
x t z
x y t z
=
+ + =
+ + =
.
a) Sejam [ ]
1
3 1 7 0
T
S = e [ ]
2
3 1 8 1
T
S = solues do sistema. Determine atravs
destas uma soluo do sistema homogneo associado.
b) Calcule a soluo geral do sistema.
Resoluo:
a) Conforme a relao1, a diferena de duas solues do sistema no homogneo uma soluo do
sistema homogneo. Logo, [ ]
1 2
0 0 1 1
T
S S = uma soluo do sistema homogneo.
b) Conforme a relao2, todas as solues do sistema AX B = podem ser obtidas somando uma
soluo particular deste sistema com cada soluo do sistema homogneo associado. Comecemos
por resolver o sistema homogneo associado utilizando o processo de condensao s linhas da
matriz do sistema
1 1 0 0 1 1 0 0
5 0 2 2 0 1 1 1
3 2 1 1 0 0 3 3
A
( (
( (
=
( (
( (
.
Como ( ) 3 r A = , o sistema indeterminado com grau de indeterminao 1 d n r = = . Um
conjunto fundamental de solues portanto constitudo por uma soluo independente, por
exemplo, [ ] 0 0 1 1
T
. A soluo geral do sistema homogneo portanto
[ ] 0 0 1 1
T
X = , e a soluo do sistema AX B = , consequentemente,
[ ] [ ] 3 1 7 0 0 0 1 1
T T
X = + , .
Vous aimerez peut-être aussi
- GerenciamentoderotinasDocument8 pagesGerenciamentoderotinasBruno GindriPas encore d'évaluation
- Dosagem de ConcretoDocument25 pagesDosagem de ConcretoSouza C. LuísPas encore d'évaluation
- Oliveira2002 PDFDocument191 pagesOliveira2002 PDFBruno GindriPas encore d'évaluation
- Análise da influência de sílica ativa em CARDocument148 pagesAnálise da influência de sílica ativa em CARMatheus PaivaPas encore d'évaluation
- BaseDocument7 pagesBaseBruno GindriPas encore d'évaluation
- 2008 MikedaSilvaPereiraDocument248 pages2008 MikedaSilvaPereiraruytguerraPas encore d'évaluation
- TCCFINAL Banca FinalDocument55 pagesTCCFINAL Banca FinalBruno GindriPas encore d'évaluation
- Memorial Contra Incendio RestauranteDocument29 pagesMemorial Contra Incendio RestauranteJessyka MaranhãoPas encore d'évaluation
- Dnit133 - 2010 - Me - Viga Benkelman (1086) PDFDocument8 pagesDnit133 - 2010 - Me - Viga Benkelman (1086) PDFleandrogauchomoura100% (1)
- TCC - CorrigidoDocument82 pagesTCC - CorrigidoMayara MoraesPas encore d'évaluation
- Tested Ash 01Document9 pagesTested Ash 01Bruno GindriPas encore d'évaluation
- GerenciamentoderotinasDocument8 pagesGerenciamentoderotinasBruno GindriPas encore d'évaluation
- Fios e Cordoalhas para Concreto ProtendidoDocument12 pagesFios e Cordoalhas para Concreto ProtendidoDaniel LimaPas encore d'évaluation
- 8D4 Curso Dashboard Parte 11Document34 pages8D4 Curso Dashboard Parte 11Thiago FrazãoPas encore d'évaluation
- 3045-Texto Do Artigo-7348-1-10-20190920Document13 pages3045-Texto Do Artigo-7348-1-10-20190920Bruno GindriPas encore d'évaluation
- Memorial Contra Incendio RestauranteDocument29 pagesMemorial Contra Incendio RestauranteJessyka MaranhãoPas encore d'évaluation
- Camilo Mizumoto - ProjetoDocument6 pagesCamilo Mizumoto - ProjetoBruno GindriPas encore d'évaluation
- DashDocument6 pagesDashBruno GindriPas encore d'évaluation
- Concreto: tipos e aplicaçõesDocument66 pagesConcreto: tipos e aplicaçõesLuís CarlosPas encore d'évaluation
- Definições Fundamentais, Consumo de Cimento, Traços e CorreçõesDocument32 pagesDefinições Fundamentais, Consumo de Cimento, Traços e CorreçõesLuana Lorca M. de JesusPas encore d'évaluation
- Tecnologia do Concreto CEFET-PRDocument102 pagesTecnologia do Concreto CEFET-PREduardo Augusto Lemos RochaPas encore d'évaluation
- Sistemas construtivos em painéis pré-fabricados de concretoDocument15 pagesSistemas construtivos em painéis pré-fabricados de concretoBruno GindriPas encore d'évaluation
- Memorial Pavim. 1Document17 pagesMemorial Pavim. 1Bruno GindriPas encore d'évaluation
- Abnt CaaDocument73 pagesAbnt CaaMarcelo Alberto RosaPas encore d'évaluation
- Transformação de traço de massa para volumeDocument2 pagesTransformação de traço de massa para volumeLucas Sena100% (8)
- A UM PASSO DO TRAÇO Ok PDFDocument21 pagesA UM PASSO DO TRAÇO Ok PDFAngelicaCelicoPas encore d'évaluation
- Gramática de Inglês TécnicoDocument18 pagesGramática de Inglês Técnicomarco_brf100% (1)
- Apostila Completa de Ingles TecnicoDocument30 pagesApostila Completa de Ingles TecnicoLeandro MendesPas encore d'évaluation
- Laudo de Inspecao SolucanaDocument18 pagesLaudo de Inspecao SolucanaBruno GindriPas encore d'évaluation
- Aula 8 PassosDocument6 pagesAula 8 PassosBruno GindriPas encore d'évaluation
- Ivo Assad Ibri - Semiótica e Pragmatismo - Interfaces TeóricasDocument265 pagesIvo Assad Ibri - Semiótica e Pragmatismo - Interfaces TeóricasOtávioPas encore d'évaluation
- As Pontes de Madison - Robert James WallerDocument85 pagesAs Pontes de Madison - Robert James WallerAline Almeida100% (1)
- Folhetos Aulas Filosofia Do Direito Parte 1 PDFDocument12 pagesFolhetos Aulas Filosofia Do Direito Parte 1 PDFCelia VasconcelosPas encore d'évaluation
- Matemática aplicada - Prova onlineDocument28 pagesMatemática aplicada - Prova onlineLouredo ContabilidadePas encore d'évaluation
- Modelo de Relatório para Educação InfantilDocument15 pagesModelo de Relatório para Educação InfantilJane Oliver86% (14)
- 100 Filosofia Semana 34 LOGICADocument4 pages100 Filosofia Semana 34 LOGICAJosé FabrícioPas encore d'évaluation
- Projeto Oficina de XadrezDocument3 pagesProjeto Oficina de XadrezJoãoMenezes50% (2)
- Análise para Licenciatura G, Ávila CompletoDocument162 pagesAnálise para Licenciatura G, Ávila CompletoGean Gonzaga100% (2)
- Conteúdo Programático - Introdução A Logica de ProgramaçãoDocument6 pagesConteúdo Programático - Introdução A Logica de Programaçãomoacir.arcPas encore d'évaluation
- O Sorriso de Pandora Jan Val EllamDocument161 pagesO Sorriso de Pandora Jan Val EllamDaniele Cicillini100% (6)
- Teste Intermédio de Filosofia 2013 Versão 2Document9 pagesTeste Intermédio de Filosofia 2013 Versão 2Anonymous U5LxkSPas encore d'évaluation
- Expressões Algébricas Lista 01 CorreçãoDocument5 pagesExpressões Algébricas Lista 01 CorreçãoElias Won Ancken100% (1)
- Simulado RLM - Prof. Felipe AlvesDocument2 pagesSimulado RLM - Prof. Felipe AlvesCurso AfirmaçãoPas encore d'évaluation
- A Criação do Mundo em Sete DiasDocument25 pagesA Criação do Mundo em Sete DiasMateus Martins100% (1)
- Falácias: argumentos inválidosDocument34 pagesFalácias: argumentos inválidosLiliana SilvaPas encore d'évaluation
- Topicos em Combinatória Contemporanea PDFDocument150 pagesTopicos em Combinatória Contemporanea PDFGisele PintoPas encore d'évaluation
- Hayek - O Papel do Conhecimento na Análise EconômicaDocument21 pagesHayek - O Papel do Conhecimento na Análise EconômicaMerenorPas encore d'évaluation
- Plano de AeeDocument5 pagesPlano de AeeLorraine Costa100% (1)
- Tabela Verdade PDFDocument1 pageTabela Verdade PDFBRUNO CÉSAR GOESPas encore d'évaluation
- Como Arma Biológica para Controle Social (4 Cópia)Document58 pagesComo Arma Biológica para Controle Social (4 Cópia)Ebert Nascimento100% (1)
- Gomes - Fotografia Contemporânea BrasileiraDocument348 pagesGomes - Fotografia Contemporânea BrasileirapservioPas encore d'évaluation
- Compreensão de pontos de vista na filosofiaDocument22 pagesCompreensão de pontos de vista na filosofiaLarissa de PaivaPas encore d'évaluation
- FilosofiaasdasDocument5 pagesFilosofiaasdasFabiana SantosPas encore d'évaluation
- O Método Hipotético DedutivoDocument3 pagesO Método Hipotético Dedutivoisabelmourad100% (3)
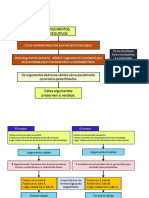
- Lógica Formal e Dialética e A Organização Dos ArgumentosDocument31 pagesLógica Formal e Dialética e A Organização Dos ArgumentosIsrael NicolauPas encore d'évaluation
- APORIADocument6 pagesAPORIAjorgmarta2952Pas encore d'évaluation
- A construção do conceito de infinito na educação básicaDocument78 pagesA construção do conceito de infinito na educação básicaVinicius Aparecido SalattaPas encore d'évaluation
- Gabarito ProvaDocument2 pagesGabarito ProvaWillian FerreiraPas encore d'évaluation
- Geometria Eucliadiana Plana Aula 2Document14 pagesGeometria Eucliadiana Plana Aula 2Curso RaízesPas encore d'évaluation
- 02 MatematicaDocument130 pages02 MatematicaNicolas MeloPas encore d'évaluation