Vous aimerez peut-être aussi
- The Magnet Motor: Making Free Energy Yourself Edition 2019D'EverandThe Magnet Motor: Making Free Energy Yourself Edition 2019Pas encore d'évaluation
- Anti-Lenz - Anti-LenzDocument6 pagesAnti-Lenz - Anti-LenzTomislav JovanovicPas encore d'évaluation
- The Magnet Motor: Making Free Energy Yourself Edition 2019D'EverandThe Magnet Motor: Making Free Energy Yourself Edition 2019Évaluation : 4 sur 5 étoiles4/5 (6)
- Mylow Magnet Motor Plans PDFDocument56 pagesMylow Magnet Motor Plans PDFC.s. Sica100% (1)
- Stanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinD'EverandStanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinPas encore d'évaluation
- Suppressed and Incredible Inventions (Reduc)Document55 pagesSuppressed and Incredible Inventions (Reduc)KWojtekPas encore d'évaluation
- The Single Cure: Human Life Extension to 300+ YearsD'EverandThe Single Cure: Human Life Extension to 300+ YearsPas encore d'évaluation
- Over-Unity Motor Doc - 1Document26 pagesOver-Unity Motor Doc - 1falcontrust100% (1)
- Free Energy GeneratorDocument18 pagesFree Energy GeneratorDeepakRajKurrey50% (4)
- 1 Permanent Magnet GeneratorDocument6 pages1 Permanent Magnet GeneratorGanti KameshPas encore d'évaluation
- Swiss Testakica Free Energy DeviceDocument9 pagesSwiss Testakica Free Energy DeviceДејан Павловић100% (2)
- Perendev Style Magnetic MotorDocument5 pagesPerendev Style Magnetic Motorbrazselva100% (2)
- Permanent Magnet MotorDocument15 pagesPermanent Magnet MotorLord BaronPas encore d'évaluation
- Vladimir Utkin's Free EnergyDocument192 pagesVladimir Utkin's Free EnergyKeresztúri Ferenc100% (2)
- Hokei MINATO Magnetic MotorDocument31 pagesHokei MINATO Magnetic Motormorsee100% (4)
- Radiant Charger - With SchematicsDocument13 pagesRadiant Charger - With SchematicsEpicBlue100% (4)
- Thomas Engel's Magnet Motor Generates Power Without FuelDocument81 pagesThomas Engel's Magnet Motor Generates Power Without Fueladela2012Pas encore d'évaluation
- MHD GeneratorDocument74 pagesMHD GeneratorMephistopheles1Pas encore d'évaluation
- Fuelless Engine 50 HP-Free EnergyDocument47 pagesFuelless Engine 50 HP-Free Energyapi-371556786% (7)
- SSgenUseful Free EnergyDocument15 pagesSSgenUseful Free EnergyWe RigdonPas encore d'évaluation
- William Alek - How To Build Solid-State Electrical Over-Unity DevicesDocument29 pagesWilliam Alek - How To Build Solid-State Electrical Over-Unity Devicesairedale terror100% (8)
- Hojo MotorDocument206 pagesHojo MotorLaterPas encore d'évaluation
- HydroxyDocument343 pagesHydroxyJorge AlonsoPas encore d'évaluation
- Introduction to MEG's in 40 charactersDocument18 pagesIntroduction to MEG's in 40 charactersPrincess Rolee ChawlaPas encore d'évaluation
- Lockridge DeviceDocument20 pagesLockridge Deviceartleader0% (1)
- The Inventions of CaptainDocument3 pagesThe Inventions of CaptainAngela0220Pas encore d'évaluation
- Centrifugal OverunityDocument1 pageCentrifugal OverunitynomderioPas encore d'évaluation
- HHO Pulse Charger 2.0 InfoDocument4 pagesHHO Pulse Charger 2.0 InfoAleksa Nataša Rančić100% (1)
- The Newman Motor Plans and Test by JLN 2Document97 pagesThe Newman Motor Plans and Test by JLN 2kishbud86% (28)
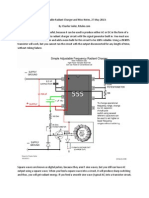
- New Adjustable Frequency Radiant Charger PDFDocument5 pagesNew Adjustable Frequency Radiant Charger PDFlancerdoom1100% (6)
- Earth CellDocument11 pagesEarth CellMatija Kelčec PesterPas encore d'évaluation
- Design and Simulation of Self-Running Magnetic MotorDocument5 pagesDesign and Simulation of Self-Running Magnetic Motorjake1000Pas encore d'évaluation
- How To Build Radiant ChargersDocument9 pagesHow To Build Radiant ChargersRed WarrantPas encore d'évaluation
- Stan Meyers Vic Circuit Rebuild GuideDocument60 pagesStan Meyers Vic Circuit Rebuild Guidepic2007100% (1)
- Solid State Electric Generator Uses Magnetic FluxDocument9 pagesSolid State Electric Generator Uses Magnetic FluxDan Beeson100% (2)
- BEDINI DiagramDocument5 pagesBEDINI DiagramEfren Rambo Rafanan100% (1)
- Design of TeslaDocument4 pagesDesign of TeslaSaahib ReddyPas encore d'évaluation
- Theory and Prototypes of Various Magnetic Motors: Lawrence Tseung April 10, 2007 V1.1 Draft For DiscussionsDocument48 pagesTheory and Prototypes of Various Magnetic Motors: Lawrence Tseung April 10, 2007 V1.1 Draft For DiscussionsVincent J. Cataldi100% (1)
- BEMF-Recoil Recovery Battery Charger - by KoneheadXDocument19 pagesBEMF-Recoil Recovery Battery Charger - by KoneheadXlittledigger100% (1)
- Hojo Motor ManuelDocument51 pagesHojo Motor ManuelMick Duval0% (1)
- 5496770-HTBARBC-Best Radiant Charging CircuitsDocument12 pages5496770-HTBARBC-Best Radiant Charging Circuitslightingfastno808Pas encore d'évaluation
- The Hendershot Motor - by The Utility EnginesDocument8 pagesThe Hendershot Motor - by The Utility EnginesD.DomenicoPas encore d'évaluation
- The Steorn Orbo Motor ReplicationDocument32 pagesThe Steorn Orbo Motor ReplicationXR500FinalPas encore d'évaluation
- A Working Radiant Free Energy SystemDocument7 pagesA Working Radiant Free Energy Systemmysticdream100% (5)
- SR - A Device Replication Installation Tariel KapanadzeDocument7 pagesSR - A Device Replication Installation Tariel KapanadzeSilviu Corcan100% (1)
- Kit To Build Fully Functional Bedini Free Energy GeneratorDocument21 pagesKit To Build Fully Functional Bedini Free Energy Generatormartdot73490100% (12)
- Meyer Magnet MotorDocument16 pagesMeyer Magnet Motormichael777Pas encore d'évaluation
- Electromagnetic and Magnetic Suspension: IJEDR1703070 474Document8 pagesElectromagnetic and Magnetic Suspension: IJEDR1703070 474Naani ChowdaryPas encore d'évaluation
- WerjefeltDocument24 pagesWerjefeltklausPas encore d'évaluation
- 1 Free-Energy Devices - Power From MagnetsDocument79 pages1 Free-Energy Devices - Power From MagnetsGoran ŠtetinPas encore d'évaluation
- Practical Guide To Energy GeneratorsDocument10 pagesPractical Guide To Energy GeneratorsAnonymous G5ScwBPas encore d'évaluation
- Design of PM MotorsDocument7 pagesDesign of PM MotorsBHARDA KUNJPas encore d'évaluation
- Free Energy GeneratorDocument9 pagesFree Energy GeneratorSridhar PatilPas encore d'évaluation
- Icietet 118Document5 pagesIcietet 118David RiosPas encore d'évaluation
- Magnet Power ExplainedDocument52 pagesMagnet Power ExplainedMayki ChiPas encore d'évaluation
- Magnetic Levitation Train Technology (Maglev: Selman Dimlioğlu 1810231010 Karabük TurkeyDocument11 pagesMagnetic Levitation Train Technology (Maglev: Selman Dimlioğlu 1810231010 Karabük TurkeyAHMET AydogduPas encore d'évaluation
- Ways of Gen Elec 1452921005 - 253IDocument10 pagesWays of Gen Elec 1452921005 - 253IgeorgePas encore d'évaluation
- A Review On How A Perpetual Motion Machine GeneratDocument8 pagesA Review On How A Perpetual Motion Machine GeneratSaleem AbbasPas encore d'évaluation
- A Free Gift That May Be Over Unity or Free Energy To The WorldDocument90 pagesA Free Gift That May Be Over Unity or Free Energy To The WorldSolimanPas encore d'évaluation
- Brass ShotshellDocument4 pagesBrass Shotshellhawk789Pas encore d'évaluation
- Living GreenDocument18 pagesLiving Greenhawk789Pas encore d'évaluation
- Cpu CoolerDocument4 pagesCpu Coolerhawk789Pas encore d'évaluation
- Manual 110LESeries 112VarmintTargetDocument36 pagesManual 110LESeries 112VarmintTargethawk789Pas encore d'évaluation
- Drying Meat... by Tom BaithDocument1 pageDrying Meat... by Tom Baithhawk789Pas encore d'évaluation
- Service KHS 9-12 71 Series Rev D-39070745Document104 pagesService KHS 9-12 71 Series Rev D-39070745hawk789Pas encore d'évaluation
- Ener ZoneDocument28 pagesEner Zonehawk789Pas encore d'évaluation
- The Renewable Energy HandbookDocument59 pagesThe Renewable Energy Handbookhawk789Pas encore d'évaluation
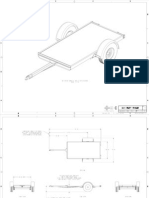
- 4x8 Utility Trailer Assembly Drawings and DiagramsDocument18 pages4x8 Utility Trailer Assembly Drawings and Diagramscualete100% (1)
- Wood Heat 110802043104 WoodHeatDocument16 pagesWood Heat 110802043104 WoodHeathawk789Pas encore d'évaluation
- LumensDocument2 pagesLumenshawk789Pas encore d'évaluation
- Saving CaculatorDocument2 pagesSaving Caculatorhawk789Pas encore d'évaluation
- HeatcalcDocument12 pagesHeatcalchawk789Pas encore d'évaluation
- THEORY of METAL CUTTING-Cutting Tool, Cutting Fluid & Machining EconomicsDocument17 pagesTHEORY of METAL CUTTING-Cutting Tool, Cutting Fluid & Machining EconomicsIzi75% (4)
- Anorexia NervosaDocument2 pagesAnorexia NervosaDhea Mae MadisPas encore d'évaluation
- Mercy PlansDocument126 pagesMercy Plansdharry8108Pas encore d'évaluation
- Homework Helpers - Chemistry PDFDocument311 pagesHomework Helpers - Chemistry PDFTamby100% (1)
- M O Publications Index Worldwide CoverageDocument5 pagesM O Publications Index Worldwide CoverageloloPas encore d'évaluation
- BS 7941-1-2006Document20 pagesBS 7941-1-2006Willy AryansahPas encore d'évaluation
- Electronics Meet Animal BrainsDocument44 pagesElectronics Meet Animal BrainssherrysherryPas encore d'évaluation
- Psychoacoustics: Art Medium SoundDocument3 pagesPsychoacoustics: Art Medium SoundTheodora CristinaPas encore d'évaluation
- Durango GS 6-7 Helitack OutreachDocument4 pagesDurango GS 6-7 Helitack OutreachdcgmPas encore d'évaluation
- Wire Rope: - Bright - 6 X 19 - Fibre CoreDocument8 pagesWire Rope: - Bright - 6 X 19 - Fibre CoreQuynh NguyenPas encore d'évaluation
- Pancreatic NekrosisDocument8 pagesPancreatic Nekrosisrisyda_mkhPas encore d'évaluation
- Filtros MaquinasDocument34 pagesFiltros MaquinasAndres AlfonzoPas encore d'évaluation
- WHO Blocks Nanosilver Shipments to Treat Ebola in AfricaDocument2 pagesWHO Blocks Nanosilver Shipments to Treat Ebola in AfricaTamas ZefferPas encore d'évaluation
- ABB Price Book 714Document1 pageABB Price Book 714EliasPas encore d'évaluation
- Rizal's Allegorical Play 'El Consejo de Los DiosesDocument9 pagesRizal's Allegorical Play 'El Consejo de Los DiosesAlexiahree ChaiPas encore d'évaluation
- Student Pilot GuideDocument13 pagesStudent Pilot GuideAŞKIN FIRATPas encore d'évaluation
- Ichroma™ COVID-19 Ab (With Ichroma™ II Reader) Test SystemDocument6 pagesIchroma™ COVID-19 Ab (With Ichroma™ II Reader) Test SystemGopinath AgnihotramPas encore d'évaluation
- Lisa - Add New Front: Process Matching/Installation and Qualification (IQ)Document62 pagesLisa - Add New Front: Process Matching/Installation and Qualification (IQ)Thanh Vũ NguyễnPas encore d'évaluation
- Nutrition and Athletic PerformanceDocument16 pagesNutrition and Athletic PerformancemarisolPas encore d'évaluation
- CHM Analysis and Comparisons of CRUS MULTHULLS2013Document60 pagesCHM Analysis and Comparisons of CRUS MULTHULLS2013kkd108Pas encore d'évaluation
- Misamis Occidental Plans to Protect Aquamarine ResourceDocument8 pagesMisamis Occidental Plans to Protect Aquamarine ResourcejelosalisaliPas encore d'évaluation
- Caterpillar 360 KWDocument6 pagesCaterpillar 360 KWAde WawanPas encore d'évaluation
- 3-Ph Induction MotorDocument246 pages3-Ph Induction MotorAn00pgadzillaPas encore d'évaluation
- Chefs at HomeDocument4 pagesChefs at Homezbdv2kyzv7Pas encore d'évaluation
- Sepuran® N Module 4": in NM /H at 7 Barg 25°CDocument2 pagesSepuran® N Module 4": in NM /H at 7 Barg 25°CsanjaigPas encore d'évaluation
- Equations 2Document8 pagesEquations 2Patrick ValdezPas encore d'évaluation
- M700-70 Series Programming Manual (M-Type) - IB1500072-F (ENG)Document601 pagesM700-70 Series Programming Manual (M-Type) - IB1500072-F (ENG)Mert SertPas encore d'évaluation
- Stats Set-1Document4 pagesStats Set-1Harsha KSPas encore d'évaluation
- Service and Repair Instructions: Water & WastewaterDocument72 pagesService and Repair Instructions: Water & WastewaterLa Marina Mantenimiento100% (1)
- Sing 2Document64 pagesSing 2WindsurfingFinnPas encore d'évaluation
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4.5 sur 5 étoiles4.5/5 (542)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsD'EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsÉvaluation : 4 sur 5 étoiles4/5 (1)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsD'EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsÉvaluation : 5 sur 5 étoiles5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026D'EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Évaluation : 5 sur 5 étoiles5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemD'EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemPas encore d'évaluation
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionD'EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionÉvaluation : 4 sur 5 étoiles4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveD'EverandUnderstanding Automotive Electronics: An Engineering PerspectiveÉvaluation : 3.5 sur 5 étoiles3.5/5 (16)
- Introduction to Power System ProtectionD'EverandIntroduction to Power System ProtectionPas encore d'évaluation
- 8051 Microcontroller: An Applications Based IntroductionD'Everand8051 Microcontroller: An Applications Based IntroductionÉvaluation : 5 sur 5 étoiles5/5 (6)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingD'EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingÉvaluation : 4 sur 5 étoiles4/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesD'EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Build Your Own Electric Vehicle, Third EditionD'EverandBuild Your Own Electric Vehicle, Third EditionÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowD'EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowPas encore d'évaluation
- The Rare Metals War: the dark side of clean energy and digital technologiesD'EverandThe Rare Metals War: the dark side of clean energy and digital technologiesÉvaluation : 5 sur 5 étoiles5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeD'EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeÉvaluation : 5 sur 5 étoiles5/5 (8)
- Beginner's Guide to Reading Schematics, Fourth EditionD'EverandBeginner's Guide to Reading Schematics, Fourth EditionÉvaluation : 3.5 sur 5 étoiles3.5/5 (10)
- Current Interruption Transients CalculationD'EverandCurrent Interruption Transients CalculationÉvaluation : 4 sur 5 étoiles4/5 (1)
- Operational Amplifier Circuits: Analysis and DesignD'EverandOperational Amplifier Circuits: Analysis and DesignÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Electronics All-in-One For Dummies, 3rd EditionD'EverandElectronics All-in-One For Dummies, 3rd EditionÉvaluation : 5 sur 5 étoiles5/5 (2)
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsD'EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsÉvaluation : 5 sur 5 étoiles5/5 (3)
- The Graphene Revolution: The Weird Science of the Ultra-thinD'EverandThe Graphene Revolution: The Weird Science of the Ultra-thinÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Electrical Principles and Technology for EngineeringD'EverandElectrical Principles and Technology for EngineeringÉvaluation : 4 sur 5 étoiles4/5 (4)