Vous aimerez peut-être aussi
- A Guide to Vintage Audio Equipment for the Hobbyist and AudiophileD'EverandA Guide to Vintage Audio Equipment for the Hobbyist and AudiophilePas encore d'évaluation
- HotFET Pre J-FET Audio Preamplifier SchematicsDocument6 pagesHotFET Pre J-FET Audio Preamplifier SchematicsJefri ErlanggaPas encore d'évaluation
- Attitude Scale For Mental IllnessDocument6 pagesAttitude Scale For Mental IllnessSyed Faizan100% (7)
- THE PERFECT DAY Compressed 1 PDFDocument218 pagesTHE PERFECT DAY Compressed 1 PDFMariaPas encore d'évaluation
- Gate Driver NotesDocument2 pagesGate Driver NotesBeng FoongPas encore d'évaluation
- Motor BookDocument252 pagesMotor BookKyaw KhPas encore d'évaluation
- Mosfet, Ic Cd4047, Lm358 Comparator Mini Ups SystemDocument28 pagesMosfet, Ic Cd4047, Lm358 Comparator Mini Ups SystemSruthi ReddyPas encore d'évaluation
- The Motherboard Voltage Regulator CircuitDocument11 pagesThe Motherboard Voltage Regulator CircuitAnonymous fE8Oa3WUPas encore d'évaluation
- Motherboard Voltage Regulator CircuitDocument22 pagesMotherboard Voltage Regulator Circuitleon_sfPas encore d'évaluation
- How To Drive MosfetDocument37 pagesHow To Drive Mosfetvolkan145380% (5)
- Diagnostic Test - Tle8Document2 pagesDiagnostic Test - Tle8rose mae marambaPas encore d'évaluation
- SWAMINATHAN Ajanta RhapsodyDocument227 pagesSWAMINATHAN Ajanta RhapsodyRoberto E. García100% (1)
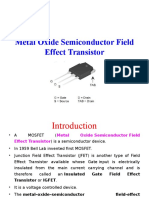
- Metal Oxide Semiconductor Field Effect TransistorDocument33 pagesMetal Oxide Semiconductor Field Effect TransistorDrVikas Singh Bhadoria100% (1)
- Mosfet Circuit Page 3 Other CircuitsDocument17 pagesMosfet Circuit Page 3 Other CircuitsreynielPas encore d'évaluation
- Using The MOSFET As A SwitchDocument4 pagesUsing The MOSFET As A Switchadrian665100% (2)
- How To Buffer An Op-Amp Output For Higher Current Part 3Document8 pagesHow To Buffer An Op-Amp Output For Higher Current Part 3adalberto soplatetasPas encore d'évaluation
- MOSFET Drivers For Motor Drives Start With Your Motor S SpecsDocument5 pagesMOSFET Drivers For Motor Drives Start With Your Motor S SpecsJar TesPas encore d'évaluation
- N Channel Mosfet TheoryDocument12 pagesN Channel Mosfet TheoryBrightchip TechnologiesPas encore d'évaluation
- How To Implement A MOSFET With A Gate Driver-1 PDFDocument9 pagesHow To Implement A MOSFET With A Gate Driver-1 PDFaarumugamPas encore d'évaluation
- Modular Circuits: Μmodule H-BridgeDocument8 pagesModular Circuits: Μmodule H-BridgeAyadPas encore d'évaluation
- Mosfets BasicsDocument7 pagesMosfets Basicsodl_123Pas encore d'évaluation
- AbstractDocument4 pagesAbstractMohamed IbrahemPas encore d'évaluation
- AbstractDocument4 pagesAbstractMohamed IbrahemPas encore d'évaluation
- AbstractDocument4 pagesAbstractMohamed IbrahemPas encore d'évaluation
- How To Buffer An Op-Amp Output For Higher Current Part 4Document8 pagesHow To Buffer An Op-Amp Output For Higher Current Part 4adalberto soplatetasPas encore d'évaluation
- Everything You Need To Know About The MotherboardDocument20 pagesEverything You Need To Know About The MotherboardHerryPas encore d'évaluation
- LN004 - PWM DRIVER For ASYMMETRIC MOTORS (V5.1) PDFDocument40 pagesLN004 - PWM DRIVER For ASYMMETRIC MOTORS (V5.1) PDFsinergicusPas encore d'évaluation
- MOSFET CircuitDocument10 pagesMOSFET CircuitAlhussain EmbarkPas encore d'évaluation
- How To Buffer An Op-Amp Output For Higher Current Part 1Document8 pagesHow To Buffer An Op-Amp Output For Higher Current Part 1adalberto soplatetasPas encore d'évaluation
- HFSSTC TheClassySelfOscillatorSteveWard, Feb2021Document14 pagesHFSSTC TheClassySelfOscillatorSteveWard, Feb2021PalmPas encore d'évaluation
- D AND E MOSFETsDocument13 pagesD AND E MOSFETsSRMEA SAN RAFAEL BULACANPas encore d'évaluation
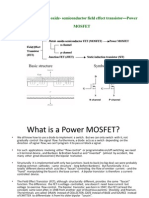
- Power MosfetDocument13 pagesPower MosfetMohd FarhanPas encore d'évaluation
- Igfet'S Insulated Gate Field Effect TransistorsDocument4 pagesIgfet'S Insulated Gate Field Effect TransistorsAnonymous xzi9LiTPas encore d'évaluation
- Multistage Differential AmplifiersDocument46 pagesMultistage Differential Amplifiersmamdery_kumarPas encore d'évaluation
- Project 1 FullDocument10 pagesProject 1 FullSaratul AkmaPas encore d'évaluation
- Motor DrivesDocument3 pagesMotor DrivesAsha ChandPas encore d'évaluation
- Mosfet Gate DriveDocument6 pagesMosfet Gate DrivegubiliPas encore d'évaluation
- Using The Power MOSFET As A SwitchDocument5 pagesUsing The Power MOSFET As A SwitchNgoc Nguyen HaPas encore d'évaluation
- Some Power PWM-drivers For Electric DC MotorsDocument11 pagesSome Power PWM-drivers For Electric DC MotorsPedroPas encore d'évaluation
- Schema ControlerDocument12 pagesSchema ControlerPopa SorinPas encore d'évaluation
- Circuitry Power ConsumptionDocument8 pagesCircuitry Power ConsumptionFreiky StuffPas encore d'évaluation
- New Microsoft Word DocumentDocument4 pagesNew Microsoft Word Documentalaa delewarPas encore d'évaluation
- Switching Fets and Dead Time: Driver Ic CircuitDocument3 pagesSwitching Fets and Dead Time: Driver Ic Circuitjean grangeonPas encore d'évaluation
- 8.1 S06L05-FieldEffectTransistors-MOSFETs - PDF - (FreeCourseWeb - Com)Document19 pages8.1 S06L05-FieldEffectTransistors-MOSFETs - PDF - (FreeCourseWeb - Com)yotopia horoor gamePas encore d'évaluation
- Transmission Logic CircuitsDocument6 pagesTransmission Logic CircuitsvenkateshPas encore d'évaluation
- Project FileDocument74 pagesProject Filevinaysnair89Pas encore d'évaluation
- Irf An-940Document5 pagesIrf An-940jamesjunPas encore d'évaluation
- Lect 10Document16 pagesLect 10Kailei ShiPas encore d'évaluation
- A High-Frequency CMOS Based Driver For High-Power MOSFET ApplicationsDocument6 pagesA High-Frequency CMOS Based Driver For High-Power MOSFET ApplicationsNikolas AugustoPas encore d'évaluation
- FETbiasDocument4 pagesFETbiasRichard LeePas encore d'évaluation
- The Design and Formula of DC To DC Converter SmpsDocument9 pagesThe Design and Formula of DC To DC Converter Smpsdewidewi76Pas encore d'évaluation
- Ti - Mosfet Gate DriveDocument40 pagesTi - Mosfet Gate Drivedownload_cruxPas encore d'évaluation
- Versatile DC Motor PWM Speed ControllerDocument5 pagesVersatile DC Motor PWM Speed ControllerinvictusPas encore d'évaluation
- ChrisDocument6 pagesChriss6601011621057Pas encore d'évaluation
- Protection v2 2Document16 pagesProtection v2 2Alexandr SemenkoffPas encore d'évaluation
- Line Follower ROBOT Micro Controller 8051Document28 pagesLine Follower ROBOT Micro Controller 8051Rohit XavierPas encore d'évaluation
- Mosfet: By: Mohamed Ahmed EL - Maghawry Mohamed Adel Yomna MohammedDocument16 pagesMosfet: By: Mohamed Ahmed EL - Maghawry Mohamed Adel Yomna MohammedAhmed Mahmoud AhmedPas encore d'évaluation
- Basic FET Ampli®ers: 6.0 PreviewDocument1 pageBasic FET Ampli®ers: 6.0 PreviewabmatazPas encore d'évaluation
- Chapter 8: Field Effect Transistors: A. Introduction To FetsDocument10 pagesChapter 8: Field Effect Transistors: A. Introduction To FetsBmanPas encore d'évaluation
- MOSFET Follies: 1. Source Follower To Replace Cathode FollowerDocument5 pagesMOSFET Follies: 1. Source Follower To Replace Cathode FollowertihomihoPas encore d'évaluation
- 3 PhaseDocument9 pages3 PhasekarlosPas encore d'évaluation
- Basic Electronics 6 2006Document47 pagesBasic Electronics 6 2006umamaheshcoolPas encore d'évaluation
- SPANNING TREE PROTOCOL: Most important topic in switchingD'EverandSPANNING TREE PROTOCOL: Most important topic in switchingPas encore d'évaluation
- Highly Integrated Gate Drivers for Si and GaN Power TransistorsD'EverandHighly Integrated Gate Drivers for Si and GaN Power TransistorsPas encore d'évaluation
- Datasheet TBJ SBW13009-KDocument5 pagesDatasheet TBJ SBW13009-KMarquinhosCostaPas encore d'évaluation
- Christine Remembered That Today Is The Birthday of Her BossDocument1 pageChristine Remembered That Today Is The Birthday of Her BossA.Pas encore d'évaluation
- Iso 27001 Requirementsandnetwrixfunctionalitymapping 1705578827995Document33 pagesIso 27001 Requirementsandnetwrixfunctionalitymapping 1705578827995Tassnim Ben youssefPas encore d'évaluation
- Ip TunnelingDocument15 pagesIp TunnelingBon Tran HongPas encore d'évaluation
- Final ExamDocument2 pagesFinal ExamblacmsPas encore d'évaluation
- TuberkulosisDocument285 pagesTuberkulosisTeuku M. FebriansyahPas encore d'évaluation
- Discover India, January 2018Document51 pagesDiscover India, January 2018calebfriesenPas encore d'évaluation
- The Big M Method: Group BDocument7 pagesThe Big M Method: Group BWoo Jin YoungPas encore d'évaluation
- 2009-04-CEN-TC121 N1574 Working Programme CEN TC 121Document28 pages2009-04-CEN-TC121 N1574 Working Programme CEN TC 121Manuel ValentePas encore d'évaluation
- Algorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, SilverkiteDocument3 pagesAlgorithm Design: Figure 1. Architecture Diagram For Greykite Library's Main Forecasting Algorithm, Silverkitesiper34606Pas encore d'évaluation
- Questionnaire OriginalDocument6 pagesQuestionnaire OriginalJAGATHESANPas encore d'évaluation
- Month Puzzle Two VariableDocument6 pagesMonth Puzzle Two VariableNayan KaithwasPas encore d'évaluation
- Factsheet AMRT 2023 01Document4 pagesFactsheet AMRT 2023 01arsyil1453Pas encore d'évaluation
- NEW Sample ISAT Questions RevisedDocument14 pagesNEW Sample ISAT Questions RevisedHa HoangPas encore d'évaluation
- Ias Book 2015Document49 pagesIas Book 2015Rahul SharmaPas encore d'évaluation
- Statistics For Criminology and Criminal Justice (Jacinta M. Gau)Document559 pagesStatistics For Criminology and Criminal Justice (Jacinta M. Gau)Mark Nelson Pano ParmaPas encore d'évaluation
- Philips fwt9200Document37 pagesPhilips fwt9200Alex BrazPas encore d'évaluation
- Malnutrition Case StudyDocument3 pagesMalnutrition Case Studyapi-622273373Pas encore d'évaluation
- Finite Element Modeling Analysis of Nano Composite Airfoil StructureDocument11 pagesFinite Element Modeling Analysis of Nano Composite Airfoil StructureSuraj GautamPas encore d'évaluation
- Atlantis Implant Compatibility Chart 79214-US-1107Document2 pagesAtlantis Implant Compatibility Chart 79214-US-1107Jean-Christophe PopePas encore d'évaluation
- Federal Public Service CommissionDocument2 pagesFederal Public Service CommissionNasir LatifPas encore d'évaluation
- Anansi and His Six Sons An African MythDocument3 pagesAnansi and His Six Sons An African MythShar Nur JeanPas encore d'évaluation
- Task 3: New - HTMLDocument12 pagesTask 3: New - HTMLGONELA SAI LOKESH (RA2011028010100)Pas encore d'évaluation
- Estocell - Data Sheet - 14-07-06Document2 pagesEstocell - Data Sheet - 14-07-06LeoRumalaAgusTatarPas encore d'évaluation