Vous aimerez peut-être aussi
- Measurement While Drilling: Signal Analysis, Optimization and DesignD'EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignPas encore d'évaluation
- Hydrocarbon Fluid Inclusions in Petroliferous BasinsD'EverandHydrocarbon Fluid Inclusions in Petroliferous BasinsPas encore d'évaluation
- Wave Propagation in Drilling, Well Logging and Reservoir ApplicationsD'EverandWave Propagation in Drilling, Well Logging and Reservoir ApplicationsPas encore d'évaluation
- Lucia 1995 Rock-FabricPetrophysical Classification of Carbonate Pore SpaceDocument26 pagesLucia 1995 Rock-FabricPetrophysical Classification of Carbonate Pore SpaceMarcos Antonio Romero Arteaga100% (1)
- Spectral Density Logging Tool: ApplicationsDocument23 pagesSpectral Density Logging Tool: Applicationsdiego isaacPas encore d'évaluation
- Resistivity LoggingDocument26 pagesResistivity LoggingRio de Mario100% (1)
- History of LoggingDocument5 pagesHistory of LoggingMudLogggerAUSPas encore d'évaluation
- Radial Cement Bond LogDocument2 pagesRadial Cement Bond LogKarlexis Mendez Rodriguez100% (1)
- Sloughing Shale: by Anuj BhatiaDocument9 pagesSloughing Shale: by Anuj BhatiaANUJ BHATIA100% (1)
- Cement Evaluation CAST-CBL HalliburtonDocument36 pagesCement Evaluation CAST-CBL HalliburtonrezaPas encore d'évaluation
- The Saturn Probe Applications in The Makakam DeltaDocument4 pagesThe Saturn Probe Applications in The Makakam DeltaNgwe Min TheinPas encore d'évaluation
- A New Technique of Thin Bed Reservoir Evaluation Using Image Log DataDocument9 pagesA New Technique of Thin Bed Reservoir Evaluation Using Image Log DataHumbang PurbaPas encore d'évaluation
- 04 - Porosity With Chart PDFDocument25 pages04 - Porosity With Chart PDFThinh Han NguyenPas encore d'évaluation
- Data Analysis Techniques-MDT-NMR 04-03-13Document22 pagesData Analysis Techniques-MDT-NMR 04-03-13Philip Hackman AntwiPas encore d'évaluation
- Catalogue 2018: Magnetic Thickness Detector (MTD)Document2 pagesCatalogue 2018: Magnetic Thickness Detector (MTD)wesam tetouhaPas encore d'évaluation
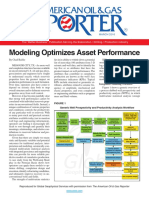
- Modeling Optimizes Asset PerformanceDocument5 pagesModeling Optimizes Asset Performanceapi-356706678100% (1)
- Shaly Sand PDFDocument18 pagesShaly Sand PDFKumareshKrish100% (1)
- Neutron Density Quick LookDocument5 pagesNeutron Density Quick LookAwad AlmalkiPas encore d'évaluation
- Logging While Drilling PDFDocument37 pagesLogging While Drilling PDFArpan BiswasPas encore d'évaluation
- YastrebDocument2 pagesYastrebSantanu SarmahPas encore d'évaluation
- Multi Array Production SuiteDocument2 pagesMulti Array Production Suitegladwin CorreiaPas encore d'évaluation
- Electrolytic Tiltmeter Basics: Jewell Electrolytic Sensor Technical NoteDocument2 pagesElectrolytic Tiltmeter Basics: Jewell Electrolytic Sensor Technical NoteSamudera Dandi APas encore d'évaluation
- (Download) : Interpretation of Variable Density LogDocument6 pages(Download) : Interpretation of Variable Density LogDeepak Rana100% (1)
- OilField Review 2016 Cement EvaluationDocument10 pagesOilField Review 2016 Cement EvaluationLuisPas encore d'évaluation
- Cement Mapping ToolsDocument7 pagesCement Mapping ToolsJosefa Maria Cardozo100% (1)
- SPE 164635 Gas Formation Testing in Exploration PhaseDocument20 pagesSPE 164635 Gas Formation Testing in Exploration PhasekevinascorraPas encore d'évaluation
- Pinnacle - BD Overview EJD PDFDocument94 pagesPinnacle - BD Overview EJD PDFaliPas encore d'évaluation
- 01 Spe-158922-Pa-P PDFDocument10 pages01 Spe-158922-Pa-P PDFfabita guzman100% (1)
- Reservoir Saturation ToolDocument50 pagesReservoir Saturation Toolroshan01100% (1)
- Well Logging by Group1Document42 pagesWell Logging by Group1Yamini Raj100% (1)
- A New Tool For Electro-Facies Analysis: Multi-Resolution Graph-Based ClusteringDocument14 pagesA New Tool For Electro-Facies Analysis: Multi-Resolution Graph-Based ClusteringElok Galih Karuniawati100% (1)
- Basic Log Interpretation Chart PDFDocument1 pageBasic Log Interpretation Chart PDFamaso95Pas encore d'évaluation
- Summary Report PertaminaPBMSJ BTJ-206 HendrikSahertian 4August-13August2013Document17 pagesSummary Report PertaminaPBMSJ BTJ-206 HendrikSahertian 4August-13August2013Menly TanPas encore d'évaluation
- Analysis of Zone A, B & C in View of Permeability, Resistivity and Bore Hole Wall Condition From Log Data Given in Log SheetDocument7 pagesAnalysis of Zone A, B & C in View of Permeability, Resistivity and Bore Hole Wall Condition From Log Data Given in Log Sheetmuzamil hussainPas encore d'évaluation
- Specific Gravity@ 60 ° FDocument9 pagesSpecific Gravity@ 60 ° FindahPas encore d'évaluation
- 8 DipmeterDocument175 pages8 DipmeterStart BackPas encore d'évaluation
- Production EvalutionDocument22 pagesProduction Evalutionhaarika1006Pas encore d'évaluation
- Depth Control For PerforatingDocument3 pagesDepth Control For PerforatingDya AliPas encore d'évaluation
- D Exponent CalculationDocument3 pagesD Exponent CalculationFlorina PrisacaruPas encore d'évaluation
- PNN Most Frequent Questions and AnswersDocument38 pagesPNN Most Frequent Questions and AnswersRoCo GeologoPas encore d'évaluation
- Cement Bond Logging Tools-SlbDocument37 pagesCement Bond Logging Tools-SlbIsmail ismailPas encore d'évaluation
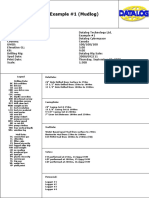
- Example Mudlog XDocument13 pagesExample Mudlog XValentina GarcíaPas encore d'évaluation
- IPA18 80 G Manusrcipt Ver1Document13 pagesIPA18 80 G Manusrcipt Ver1billal_m_aslamPas encore d'évaluation
- Trey MS Thesis 2013Document71 pagesTrey MS Thesis 2013MojtabaFathiPas encore d'évaluation
- 01 - Pulse Neutron Neutron (PNN) Tool - Logging For PorosityDocument9 pages01 - Pulse Neutron Neutron (PNN) Tool - Logging For PorosityDaniel UmañaPas encore d'évaluation
- Part 4 The ToolsDocument319 pagesPart 4 The ToolsTanaskumarKanesanPas encore d'évaluation
- Advancements in Tools Used While LoggingDocument38 pagesAdvancements in Tools Used While LoggingSudeep Chandra VarmaPas encore d'évaluation
- TA MWD-LWD SpecificationDocument17 pagesTA MWD-LWD SpecificationgjzrPas encore d'évaluation
- Foamed-Cement Evaluation With Conventional Cement Logs and Improved Interpretation MethodsDocument2 pagesFoamed-Cement Evaluation With Conventional Cement Logs and Improved Interpretation MethodsHamed SadeghiPas encore d'évaluation
- ECA TLC ProcedureDocument24 pagesECA TLC ProcedureGheorghe Adrian100% (1)
- Density Log: Fungsi Prinsip Kerja Dan Formula Bentuk Slipe Log Kondisi Optimum PengukuranDocument26 pagesDensity Log: Fungsi Prinsip Kerja Dan Formula Bentuk Slipe Log Kondisi Optimum PengukuranRiska IndahPas encore d'évaluation
- Schlumberger Shale Successes Volume 1Document91 pagesSchlumberger Shale Successes Volume 1Mohammad AlostathPas encore d'évaluation
- Albertin - The Time For Depth ImagingDocument14 pagesAlbertin - The Time For Depth ImagingkurtpeekPas encore d'évaluation
- CGE 674 CGE 674 CGE 674 CGE 674 Formation Evaluation Formation Evaluation Formation Evaluation Formation EvaluationDocument65 pagesCGE 674 CGE 674 CGE 674 CGE 674 Formation Evaluation Formation Evaluation Formation Evaluation Formation EvaluationNamwangala Rashid NatinduPas encore d'évaluation
- Cementing EvaluationDocument8 pagesCementing EvaluationRman HdrPas encore d'évaluation
- PNN - Faq: Pulsed Neutron Neutron Frequently Asked QuestionsDocument30 pagesPNN - Faq: Pulsed Neutron Neutron Frequently Asked QuestionsCarlos Alberto Aguilera MendezPas encore d'évaluation
- Evolution of Wireline Well-Logging TechniuqeDocument5 pagesEvolution of Wireline Well-Logging Techniuqemahmoud_al_kafajiPas encore d'évaluation
- Drilling AssignmentDocument1 pageDrilling AssignmentBadut Sarkas100% (1)
- Aerated DrillingDocument10 pagesAerated DrillingDen YogaPas encore d'évaluation
- Lecture 5. Neutron LoggingDocument72 pagesLecture 5. Neutron LoggingDimash AbdrakhmanovPas encore d'évaluation
- Basic Neutron Physics For Logging ApplicationsDocument16 pagesBasic Neutron Physics For Logging ApplicationsbijupiraPas encore d'évaluation
- Nuclear Magnetic LoggingDocument33 pagesNuclear Magnetic LoggingbijupiraPas encore d'évaluation
- Neutron Porosity DevicesDocument38 pagesNeutron Porosity DevicesbijupiraPas encore d'évaluation
- Pulsed Neutron DevicesDocument24 pagesPulsed Neutron DevicesbijupiraPas encore d'évaluation
- Acoustic Waves in RocksDocument21 pagesAcoustic Waves in RocksbijupiraPas encore d'évaluation
- Introduction To Acoustic LoggingDocument20 pagesIntroduction To Acoustic LoggingbijupiraPas encore d'évaluation
- Lithology Identification From Porosity LogsDocument21 pagesLithology Identification From Porosity LogsbijupiraPas encore d'évaluation
- Clay Typing and Quantification From LogsDocument31 pagesClay Typing and Quantification From LogsbijupiraPas encore d'évaluation
- 03full InterpretationDocument9 pages03full Interpretationgeophysicist_mhmdPas encore d'évaluation
- Saturation EstimationDocument18 pagesSaturation EstimationbijupiraPas encore d'évaluation
- A Geology For Engineers: Seventh EditionDocument4 pagesA Geology For Engineers: Seventh EditionbijupiraPas encore d'évaluation
- SI UnitsDocument2 pagesSI UnitsbijupiraPas encore d'évaluation
- AddendaDocument1 pageAddendabijupiraPas encore d'évaluation
- Surface ProcessesDocument8 pagesSurface ProcessesbijupiraPas encore d'évaluation
- Table of ContentsDocument12 pagesTable of ContentsbijupiraPas encore d'évaluation
- 6115 23083 1 PBDocument9 pages6115 23083 1 PBAhmed Nadhem AlshamsiPas encore d'évaluation
- Gas Hydrates BasicsDocument39 pagesGas Hydrates BasicsAbdallah MohammadPas encore d'évaluation
- 191 GC2018 Sonic Velocities and Depth ConversionDocument10 pages191 GC2018 Sonic Velocities and Depth ConversionAtubrah PrincePas encore d'évaluation
- Full Waveform SonicDocument5 pagesFull Waveform SonicsandybattenPas encore d'évaluation
- Wireline Tool CodeDocument13 pagesWireline Tool CodeNii AkaTuePas encore d'évaluation
- Presentation7 - Sonic or Acoustic Log Classroom - NewwwwDocument43 pagesPresentation7 - Sonic or Acoustic Log Classroom - NewwwwIndarti ManikPas encore d'évaluation
- Sonic LogDocument12 pagesSonic LogUmarDhillonPas encore d'évaluation
- Week-02-Tuesday-02March2021-PBM5144 and PAM5143 - Formation Evaluation-Acoustic and NMR Logging ToolsDocument50 pagesWeek-02-Tuesday-02March2021-PBM5144 and PAM5143 - Formation Evaluation-Acoustic and NMR Logging ToolsKaoru AmanePas encore d'évaluation
- Sonic LoggingDocument21 pagesSonic LoggingStowartPas encore d'évaluation
- Image Logging: Borehole Wall ImagingDocument46 pagesImage Logging: Borehole Wall Imaginghamed1725Pas encore d'évaluation
- Application of Machine Learning To Estimate Sonic Data For Seismic Well Ties, Bongkot Field, ThailandDocument14 pagesApplication of Machine Learning To Estimate Sonic Data For Seismic Well Ties, Bongkot Field, ThailandThanapong KetmaleePas encore d'évaluation
- 10 Determination of PorosityDocument17 pages10 Determination of PorosityAsad MerajPas encore d'évaluation
- LWD Vs - WL LogDocument16 pagesLWD Vs - WL LogJean CarlosPas encore d'évaluation
- Synthetic Sonic Logs-A Process For Stratigraphic Interpretation Can Work For PresentationDocument24 pagesSynthetic Sonic Logs-A Process For Stratigraphic Interpretation Can Work For PresentationQazi Sohail ImranPas encore d'évaluation
- Sonic Logging: M. P. Tixier R. P. AlgerDocument9 pagesSonic Logging: M. P. Tixier R. P. Algersaeed65Pas encore d'évaluation
- Sonic LoggingDocument19 pagesSonic LoggingSuleiman BaruniPas encore d'évaluation
- Silo - Tips Chapter 12 Sonic Logs Lecture Notes For Pet 370 Spring 2012 Prepared by Thomas W Engler PHD PeDocument21 pagesSilo - Tips Chapter 12 Sonic Logs Lecture Notes For Pet 370 Spring 2012 Prepared by Thomas W Engler PHD PeIntanNurDaniaPas encore d'évaluation
- Sonic 2006.cleanedDocument11 pagesSonic 2006.cleanedDil Dhadakne DoPas encore d'évaluation
- Theleadingedge201503 DLDocument108 pagesTheleadingedge201503 DLJorge Orejarena GarciaPas encore d'évaluation
- Sonic Log-ApplicationsDocument31 pagesSonic Log-Applicationssher afganPas encore d'évaluation
- Sonic PetrophysicsDocument26 pagesSonic PetrophysicsLuis Carlos Patiño Lagos100% (1)
- Acoustic Logging Methods and ApplicationsDocument36 pagesAcoustic Logging Methods and ApplicationsbijupiraPas encore d'évaluation
- Pore Pressure Prediction Using Seismic Velocity Modeling: Case Study, Sefid Zakhor Gas Field in Southern IranDocument12 pagesPore Pressure Prediction Using Seismic Velocity Modeling: Case Study, Sefid Zakhor Gas Field in Southern IranAhmedPas encore d'évaluation
- CBL VDL 200 050Document13 pagesCBL VDL 200 050Wilman Ardila BarbosaPas encore d'évaluation
- Ciriaj: This Document Contains PagesDocument340 pagesCiriaj: This Document Contains Pageshz135874100% (1)
- Lecture 4 - Sonic (Acoustic) LogDocument39 pagesLecture 4 - Sonic (Acoustic) Logrevan aramPas encore d'évaluation
- 10 - The Geological Interpretation of Well LogsDocument292 pages10 - The Geological Interpretation of Well LogsLorenza LorenzanaPas encore d'évaluation
- Intern Report ONGCDocument41 pagesIntern Report ONGCSaptarshi MajiPas encore d'évaluation
- Notes Geophysical MethodsDocument16 pagesNotes Geophysical MethodsApocalyptic TsunamiPas encore d'évaluation
- Well Logging Notes - Sonic LogsDocument16 pagesWell Logging Notes - Sonic Logskalitaanishem50% (2)