Vous aimerez peut-être aussi
- Configuración Módulo Analógico SX2Document3 pagesConfiguración Módulo Analógico SX2nacho_romero_18Pas encore d'évaluation
- MAN DRO NV 300M v2.xxDocument52 pagesMAN DRO NV 300M v2.xxAntonio Marcos CarvalhoPas encore d'évaluation
- Fagor Dro NV 300-301E EDM Installation Manual PDFDocument52 pagesFagor Dro NV 300-301E EDM Installation Manual PDFMihir PanchalPas encore d'évaluation
- C - Tutorial Pages 119 211Document93 pagesC - Tutorial Pages 119 211Christophe DerennePas encore d'évaluation
- Basic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FDocument6 pagesBasic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FAdvance CNC TechnologiesPas encore d'évaluation
- Maxthermo Programmer Manual.Document21 pagesMaxthermo Programmer Manual.sergio paulo chavesPas encore d'évaluation
- IMS MD20 ES English ManualDocument21 pagesIMS MD20 ES English ManualinfoPas encore d'évaluation
- Manual: Automatic ActuatorDocument10 pagesManual: Automatic ActuatorSholehz Bluez ManagementzPas encore d'évaluation
- SDG1000 ServiceManual SM02010-E01BDocument68 pagesSDG1000 ServiceManual SM02010-E01BjanekiviPas encore d'évaluation
- DMX512 Decoder2Document16 pagesDMX512 Decoder2Γιάννης ΓκοτσόπουλοςPas encore d'évaluation
- DELTA IA-PLC Mark AN EN 20151022 PDFDocument32 pagesDELTA IA-PLC Mark AN EN 20151022 PDFengrmunirPas encore d'évaluation
- D500n EngDocument36 pagesD500n EngWewey NuestroPas encore d'évaluation
- DS100S ManualDocument23 pagesDS100S ManualJuan Francisco Sanchez MassadiPas encore d'évaluation
- ARDU-5351 Manual EnglishDocument11 pagesARDU-5351 Manual EnglishStevanus ColonnePas encore d'évaluation
- LG E1941sDocument37 pagesLG E1941srammerDankovPas encore d'évaluation
- DCAP-3200 Motor Control Unit (V1.1.1-20150901)Document7 pagesDCAP-3200 Motor Control Unit (V1.1.1-20150901)Văn Ngọc NguyễnPas encore d'évaluation
- BMP180 (Barometric Pressure Sensor) : SpecificationsDocument34 pagesBMP180 (Barometric Pressure Sensor) : Specificationsabhilash100% (3)
- DVP-28SV Instruction enDocument2 pagesDVP-28SV Instruction enjoaokalatecPas encore d'évaluation
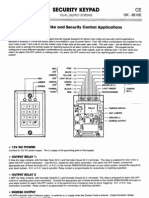
- T/P Switchable Dialer With Redial Handfree Function: SC91214/91215 SERIESDocument16 pagesT/P Switchable Dialer With Redial Handfree Function: SC91214/91215 SERIESDilpreet SinghPas encore d'évaluation
- WT Operation ManualDocument51 pagesWT Operation ManualpngchanhPas encore d'évaluation
- InstructionsDocument4 pagesInstructionsMichael GiannakPas encore d'évaluation
- Delta Ia-Plc Mark An en 20191224Document39 pagesDelta Ia-Plc Mark An en 20191224bebe_roalbaPas encore d'évaluation
- Ams4a051 Winch Operators Display Panel RevlDocument48 pagesAms4a051 Winch Operators Display Panel Revlbaggo81Pas encore d'évaluation
- DR5800-2 ServiceManua01Document61 pagesDR5800-2 ServiceManua01Daniel Fernando Sotelo LagosPas encore d'évaluation
- Teren - DPTN120Document1 pageTeren - DPTN120samuel christianPas encore d'évaluation
- Manual DCP 10Document32 pagesManual DCP 10Janko Gardašević86% (7)
- User Manual of T22 Mini Frequency Inverter - 20230504150700Document17 pagesUser Manual of T22 Mini Frequency Inverter - 20230504150700Yudha Panji RahmanPas encore d'évaluation
- Delta DVP-ES2 I MUL 20121031Document20 pagesDelta DVP-ES2 I MUL 20121031Rafael BispoPas encore d'évaluation
- DELTA IA-PLC Mark AN EN 20150903Document32 pagesDELTA IA-PLC Mark AN EN 20150903Francisco HenriquePas encore d'évaluation
- SpeedLog SimulatorDocument17 pagesSpeedLog SimulatorredvalorPas encore d'évaluation
- 3axis Scanhead Control Board Manual 2012Document21 pages3axis Scanhead Control Board Manual 2012ramjocePas encore d'évaluation
- DELTA IA-PLC Interrupt AN EN 20150706 PDFDocument29 pagesDELTA IA-PLC Interrupt AN EN 20150706 PDFengrmunirPas encore d'évaluation
- 13 Liteputer DX 625 20 Eum BDocument16 pages13 Liteputer DX 625 20 Eum BEmilianoAyestaránPas encore d'évaluation
- Anritsu S331CDocument16 pagesAnritsu S331CjoefernsPas encore d'évaluation
- Bicotest-T625 ManualDocument57 pagesBicotest-T625 Manualhino_kaguPas encore d'évaluation
- E21 Operation Manual: (Version: V1.04)Document27 pagesE21 Operation Manual: (Version: V1.04)Тимур АлиевPas encore d'évaluation
- User Manual ALFA (NET) 31 DP - 10/+90 C Cool/Heat Thermostat.: FunctionDocument4 pagesUser Manual ALFA (NET) 31 DP - 10/+90 C Cool/Heat Thermostat.: FunctiontaupiqPas encore d'évaluation
- Ninglu NMEA Simulator PDFDocument17 pagesNinglu NMEA Simulator PDFtariktunadPas encore d'évaluation
- Epoch: Instruction ManualDocument10 pagesEpoch: Instruction ManualDpt HtegnPas encore d'évaluation
- Model: Service ManualDocument49 pagesModel: Service ManualJose Mosqueda CortesPas encore d'évaluation
- Delta Ia-Cta Cta Um en 20070509 PDFDocument25 pagesDelta Ia-Cta Cta Um en 20070509 PDFWan ShahmisufiPas encore d'évaluation
- Am 7500 eDocument4 pagesAm 7500 eajatabuy530Pas encore d'évaluation
- Delta Vfd007l21aDocument2 pagesDelta Vfd007l21aCongora PabloPas encore d'évaluation
- G90 Operation ManualV1.00-Temporary - EnglishDocument10 pagesG90 Operation ManualV1.00-Temporary - EnglishRazman RashidPas encore d'évaluation
- EP20 TB 4G User ManualDocument12 pagesEP20 TB 4G User ManualARMAND WALDOPas encore d'évaluation
- RANGER 8600 Downloadable Control Communicator Installation ManualDocument28 pagesRANGER 8600 Downloadable Control Communicator Installation ManualJavier Palacios SanchezPas encore d'évaluation
- SELECT RC102 ManualDocument2 pagesSELECT RC102 Manualabhaya2806Pas encore d'évaluation
- A12 Ss User ManualDocument12 pagesA12 Ss User Manualanon_758951955Pas encore d'évaluation
- User Manual Ex Es SsDocument150 pagesUser Manual Ex Es Ssmoh300Pas encore d'évaluation
- CM2000 PDFDocument24 pagesCM2000 PDFJuan Felipe Vanegas VargasPas encore d'évaluation
- Manual Xk3190 A12Document17 pagesManual Xk3190 A12Paul Cabrera0% (1)
- Site Master S311D Cable and Antenna Analyzer Maintenance ManualDocument20 pagesSite Master S311D Cable and Antenna Analyzer Maintenance ManualNAPEN SIMONPas encore d'évaluation
- Mitsubishi PLC Addressing, Instruction & Device List Quick Ref V2 PDFDocument8 pagesMitsubishi PLC Addressing, Instruction & Device List Quick Ref V2 PDFjaimeasisaPas encore d'évaluation
- Manual Uwe W10Document27 pagesManual Uwe W10michigato100% (1)
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesD'EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Projects With Microcontrollers And PICCD'EverandProjects With Microcontrollers And PICCÉvaluation : 5 sur 5 étoiles5/5 (1)
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142D'EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Pas encore d'évaluation
- Internet of Things: Geethanjali College of Engineering and TechnologyDocument84 pagesInternet of Things: Geethanjali College of Engineering and TechnologySurya KarthikPas encore d'évaluation
- 8251A Programmable Communication InterfaceDocument25 pages8251A Programmable Communication InterfaceRohith YerrabachalaPas encore d'évaluation
- NB04 02 FD11 Standard SpecificationsDocument22 pagesNB04 02 FD11 Standard SpecificationsXanti Zabala Da RosaPas encore d'évaluation
- Khan New ResumeDocument2 pagesKhan New ResumekhanPas encore d'évaluation
- DX DiagDocument14 pagesDX DiagMelissa MorganPas encore d'évaluation
- Online Ethernet 10Base-Fl Module Installation and Operation GuideDocument100 pagesOnline Ethernet 10Base-Fl Module Installation and Operation Guidesol9159Pas encore d'évaluation
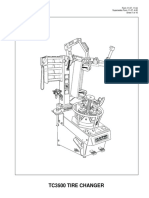
- Hunter TC3500Document31 pagesHunter TC3500dionisio emilio reyes jimenezPas encore d'évaluation
- Instruct Abler GB LampDocument4 pagesInstruct Abler GB LampNhan NguyenPas encore d'évaluation
- Student Book1 Answer Key PDFDocument88 pagesStudent Book1 Answer Key PDFDiep Thao DinhPas encore d'évaluation
- Using Open Source Tools For AT91SAM7S Cross Development Revision C PDFDocument198 pagesUsing Open Source Tools For AT91SAM7S Cross Development Revision C PDFducchinh1001Pas encore d'évaluation
- Answer Key - Technical English A WorkbookDocument74 pagesAnswer Key - Technical English A WorkbookRithanyaa Gopinathan80% (5)
- IntroductionDocument18 pagesIntroductionCường TrầnPas encore d'évaluation
- Scd2100 Rtu Manual B0780ad CDocument52 pagesScd2100 Rtu Manual B0780ad CShie Othong100% (1)
- Ru-510 e A4fc955099Document20 pagesRu-510 e A4fc955099pjte39Pas encore d'évaluation
- Introduction To Syncsort MF ProductsDocument8 pagesIntroduction To Syncsort MF ProductsMarcioPas encore d'évaluation
- Tia10e ch02 Tablet Tour SBTBDocument6 pagesTia10e ch02 Tablet Tour SBTBBill BPas encore d'évaluation
- The Beginners Guide To Robotc: Volume 1, 3 EditionDocument16 pagesThe Beginners Guide To Robotc: Volume 1, 3 EditionwewePas encore d'évaluation
- Gforth-0 7 0 PDFDocument282 pagesGforth-0 7 0 PDFdehammoPas encore d'évaluation
- Bugzilla Installation StepsDocument2 pagesBugzilla Installation StepsShekar SPas encore d'évaluation
- Dell EMC Konesalituoteperhe 1Document24 pagesDell EMC Konesalituoteperhe 1amit_post2000Pas encore d'évaluation
- Curriculum Vitae of Shamsul HaqueDocument2 pagesCurriculum Vitae of Shamsul HaqueRakibul HasanPas encore d'évaluation
- SES/SEM Series: High-Performance Automatic Screwdrivers With Automatic FeedingDocument4 pagesSES/SEM Series: High-Performance Automatic Screwdrivers With Automatic FeedingAhmet KuşçuoğluPas encore d'évaluation
- Ansys Student FaqDocument8 pagesAnsys Student FaqPidin AlhazPas encore d'évaluation
- Catch ReportDocument26 pagesCatch Reportabhishek kulkarniPas encore d'évaluation
- Indentifikasi Kebutuhan Peralatan Praktik Dan / Atau Peraga Pendidikan Dalam Mendukung Prosesbelajar MengajarDocument6 pagesIndentifikasi Kebutuhan Peralatan Praktik Dan / Atau Peraga Pendidikan Dalam Mendukung Prosesbelajar MengajarRobert LedoPas encore d'évaluation
- AnimatorDocument1 165 pagesAnimatorrdmwebPas encore d'évaluation
- Computer Architecture Complexity and Correctness by Silvia M MuellerWolfgang J PDFDocument568 pagesComputer Architecture Complexity and Correctness by Silvia M MuellerWolfgang J PDFDaryl ScottPas encore d'évaluation
- Climatic 50Document36 pagesClimatic 50Tayfun BicakPas encore d'évaluation
- I o M 70 HDocument2 pagesI o M 70 HAndrejPas encore d'évaluation
- Guide A - BMW INPA Installation Manual ALL Win OSDocument60 pagesGuide A - BMW INPA Installation Manual ALL Win OSSorinPetrisor100% (1)